 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSocially Cognizant Robotics for a Technology Enhanced Society
Oct 27, 2023



Emerging applications of robotics, and concerns about their impact, require the research community to put human-centric objectives front-and-center. To meet this challenge, we advocate an interdisciplinary approach, socially cognizant robotics, which synthesizes technical and social science methods. We argue that this approach follows from the need to empower stakeholder participation (from synchronous human feedback to asynchronous societal assessment) in shaping AI-driven robot behavior at all levels, and leads to a range of novel research perspectives and problems both for improving robots' interactions with individuals and impacts on society. Drawing on these arguments, we develop best practices for socially cognizant robot design that balance traditional technology-based metrics (e.g. efficiency, precision and accuracy) with critically important, albeit challenging to measure, human and society-based metrics.
Differential Viewpoints for Ground Terrain Material Recognition
Sep 22, 2020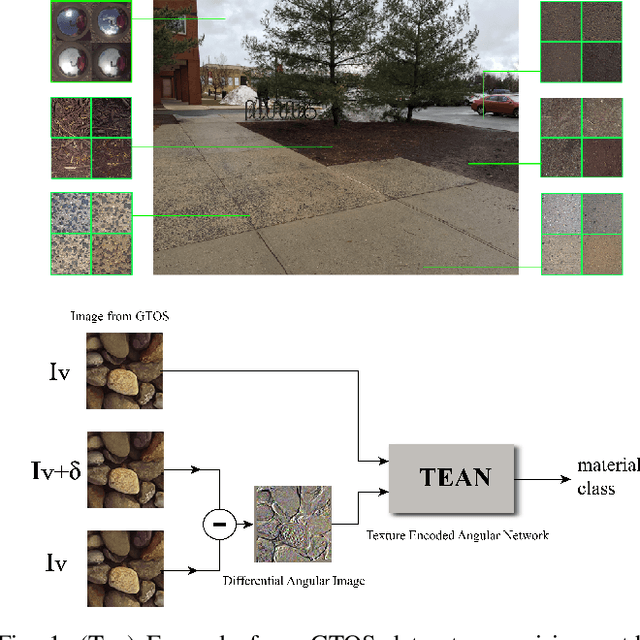
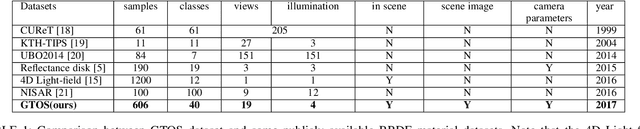
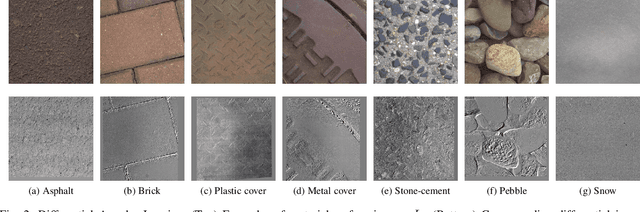
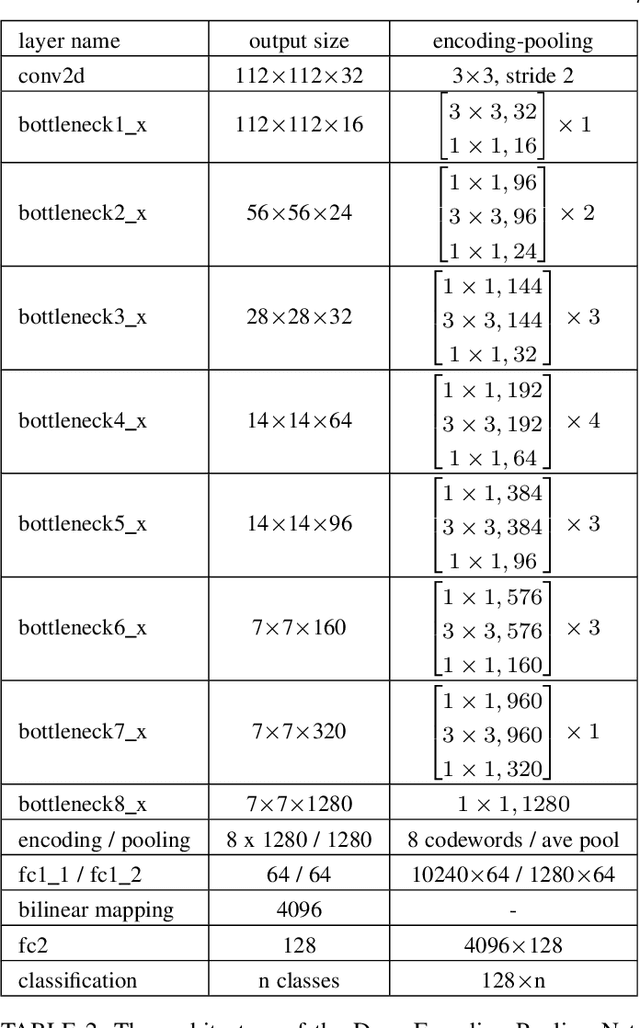
Computational surface modeling that underlies material recognition has transitioned from reflectance modeling using in-lab controlled radiometric measurements to image-based representations based on internet-mined single-view images captured in the scene. We take a middle-ground approach for material recognition that takes advantage of both rich radiometric cues and flexible image capture. A key concept is differential angular imaging, where small angular variations in image capture enables angular-gradient features for an enhanced appearance representation that improves recognition. We build a large-scale material database, Ground Terrain in Outdoor Scenes (GTOS) database, to support ground terrain recognition for applications such as autonomous driving and robot navigation. The database consists of over 30,000 images covering 40 classes of outdoor ground terrain under varying weather and lighting conditions. We develop a novel approach for material recognition called texture-encoded angular network (TEAN) that combines deep encoding pooling of RGB information and differential angular images for angular-gradient features to fully leverage this large dataset. With this novel network architecture, we extract characteristics of materials encoded in the angular and spatial gradients of their appearance. Our results show that TEAN achieves recognition performance that surpasses single view performance and standard (non-differential/large-angle sampling) multiview performance.
* IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI). arXiv admin note: substantial text overlap with arXiv:1612.02372
Photo-realistic Facial Texture Transfer
Jun 14, 2017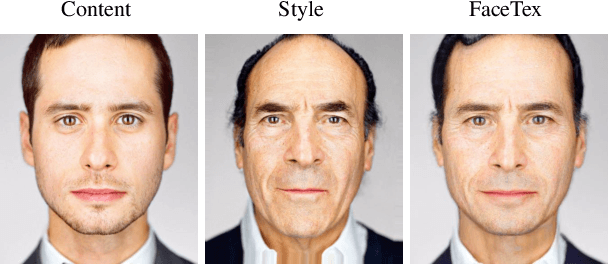
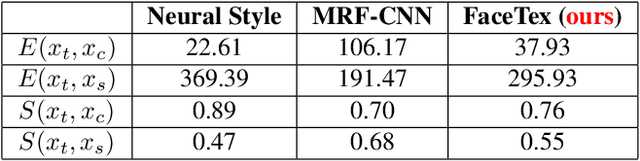


Style transfer methods have achieved significant success in recent years with the use of convolutional neural networks. However, many of these methods concentrate on artistic style transfer with few constraints on the output image appearance. We address the challenging problem of transferring face texture from a style face image to a content face image in a photorealistic manner without changing the identity of the original content image. Our framework for face texture transfer (FaceTex) augments the prior work of MRF-CNN with a novel facial semantic regularization that incorporates a face prior regularization smoothly suppressing the changes around facial meso-structures (e.g eyes, nose and mouth) and a facial structure loss function which implicitly preserves the facial structure so that face texture can be transferred without changing the original identity. We demonstrate results on face images and compare our approach with recent state-of-the-art methods. Our results demonstrate superior texture transfer because of the ability to maintain the identity of the original face image.
Optimal Radiometric Calibration for Camera-Display Communication
Jan 08, 2015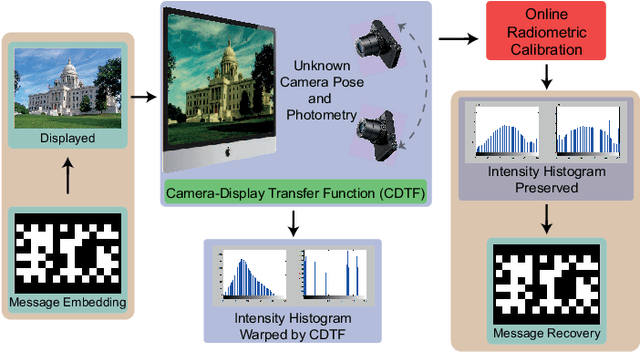
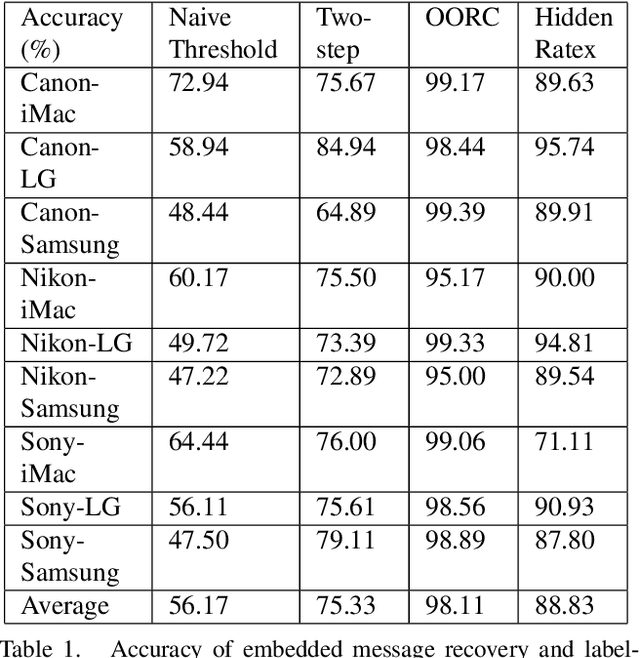
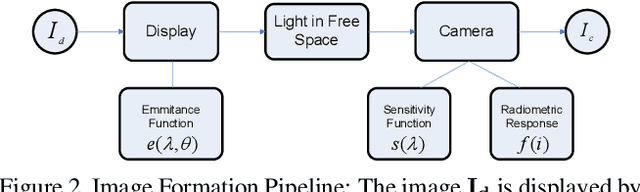
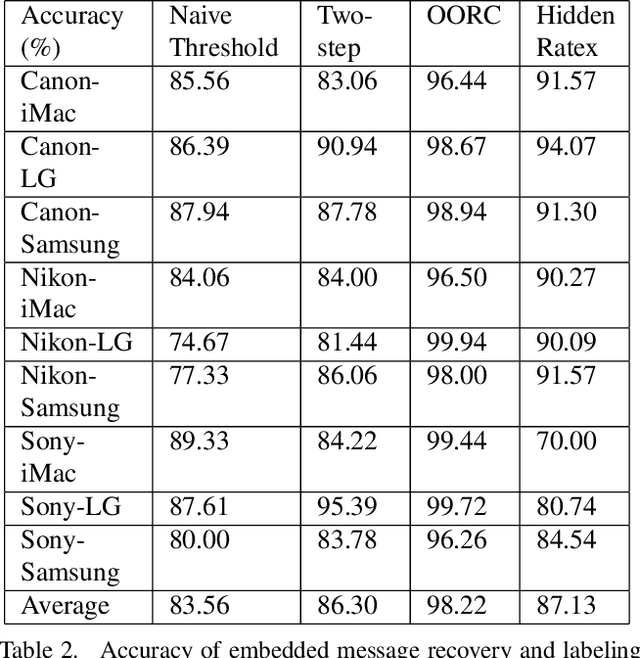
We present a novel method for communicating between a camera and display by embedding and recovering hidden and dynamic information within a displayed image. A handheld camera pointed at the display can receive not only the display image, but also the underlying message. These active scenes are fundamentally different from traditional passive scenes like QR codes because image formation is based on display emittance, not surface reflectance. Detecting and decoding the message requires careful photometric modeling for computational message recovery. Unlike standard watermarking and steganography methods that lie outside the domain of computer vision, our message recovery algorithm uses illumination to optically communicate hidden messages in real world scenes. The key innovation of our approach is an algorithm that performs simultaneous radiometric calibration and message recovery in one convex optimization problem. By modeling the photometry of the system using a camera-display transfer function (CDTF), we derive a physics-based kernel function for support vector machine classification. We demonstrate that our method of optimal online radiometric calibration (OORC) leads to an efficient and robust algorithm for computational messaging between nine commercial cameras and displays.