 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDifferential Viewpoints for Ground Terrain Material Recognition
Paper and Code
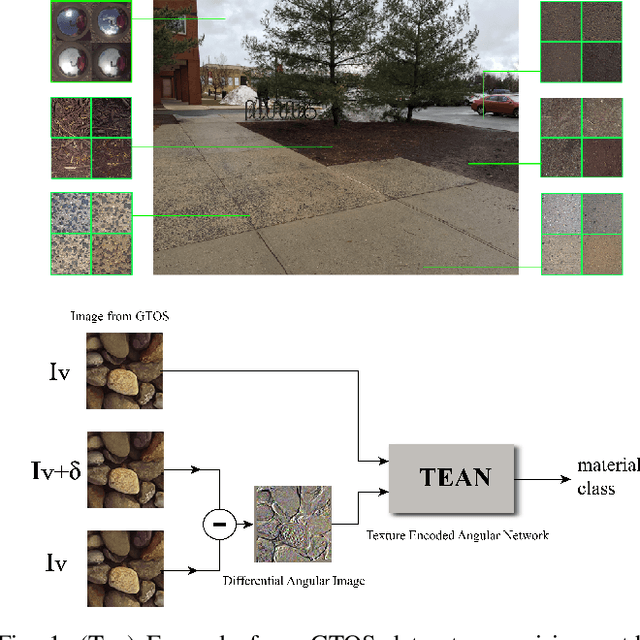
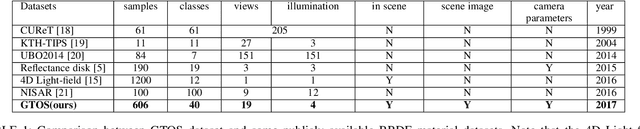
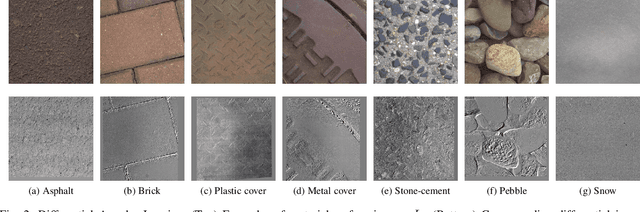
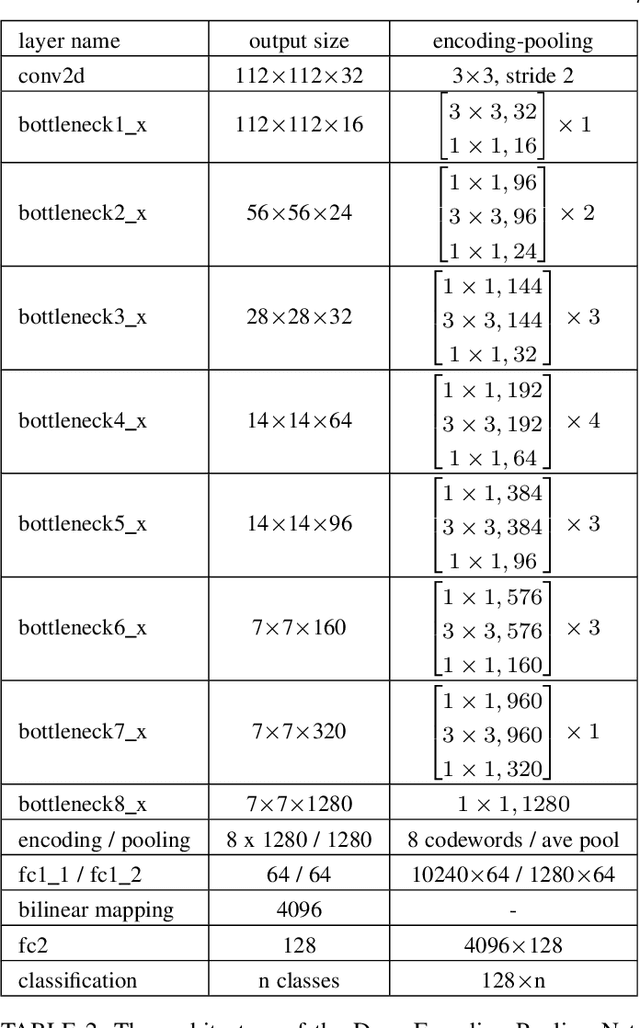
Computational surface modeling that underlies material recognition has transitioned from reflectance modeling using in-lab controlled radiometric measurements to image-based representations based on internet-mined single-view images captured in the scene. We take a middle-ground approach for material recognition that takes advantage of both rich radiometric cues and flexible image capture. A key concept is differential angular imaging, where small angular variations in image capture enables angular-gradient features for an enhanced appearance representation that improves recognition. We build a large-scale material database, Ground Terrain in Outdoor Scenes (GTOS) database, to support ground terrain recognition for applications such as autonomous driving and robot navigation. The database consists of over 30,000 images covering 40 classes of outdoor ground terrain under varying weather and lighting conditions. We develop a novel approach for material recognition called texture-encoded angular network (TEAN) that combines deep encoding pooling of RGB information and differential angular images for angular-gradient features to fully leverage this large dataset. With this novel network architecture, we extract characteristics of materials encoded in the angular and spatial gradients of their appearance. Our results show that TEAN achieves recognition performance that surpasses single view performance and standard (non-differential/large-angle sampling) multiview performance.