 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Flexible Heterogeneous Coordination with Capability-Aware Shared Hypernetworks
Jan 10, 2025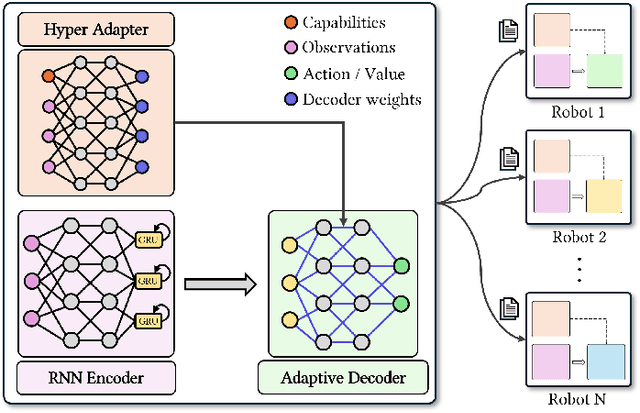
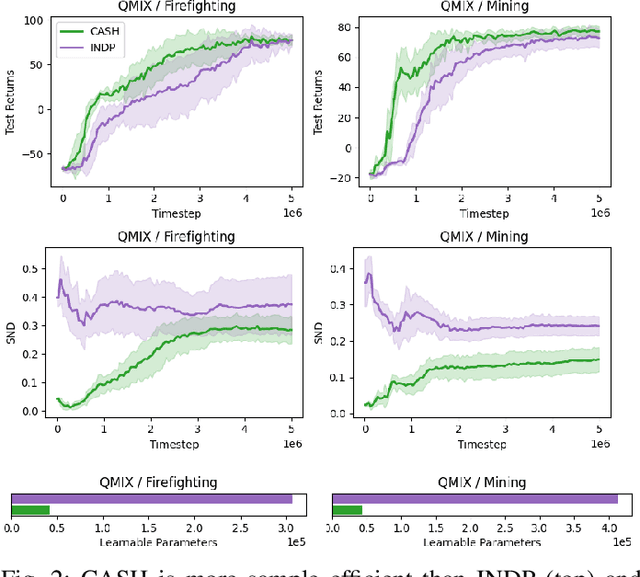
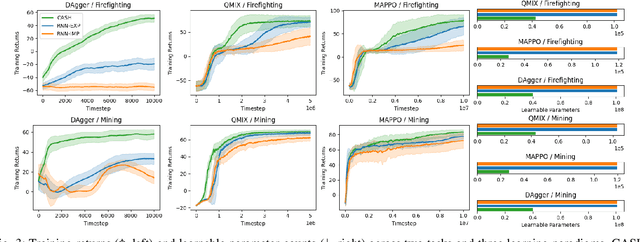
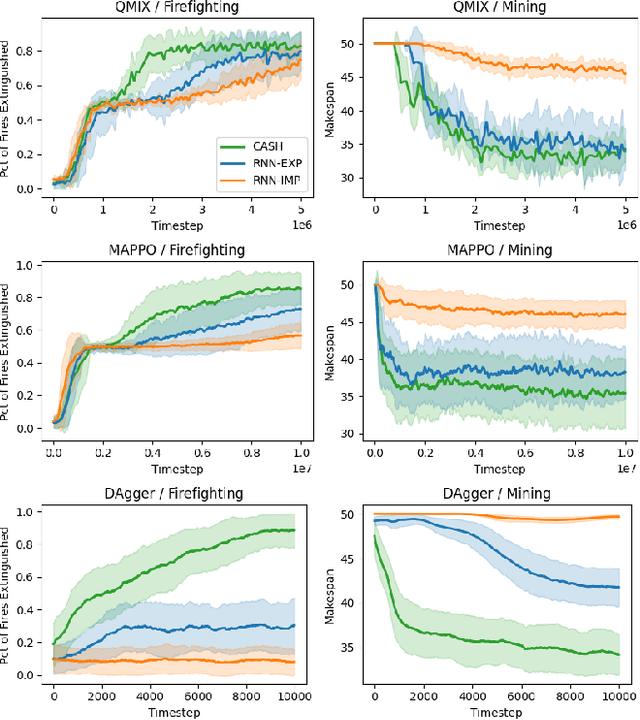
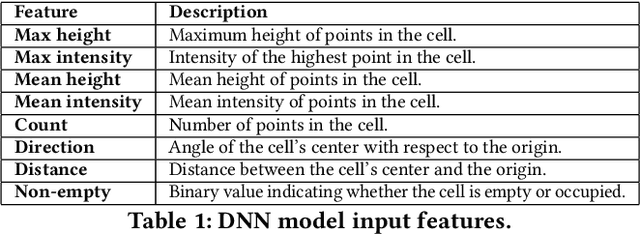
Cooperative heterogeneous multi-agent tasks require agents to effectively coordinate their behaviors while accounting for their relative capabilities. Learning-based solutions to this challenge span between two extremes: i) shared-parameter methods, which encode diverse behaviors within a single architecture by assigning an ID to each agent, and are sample-efficient but result in limited behavioral diversity; ii) independent methods, which learn a separate policy for each agent, and show greater behavioral diversity but lack sample-efficiency. Prior work has also explored selective parameter-sharing, allowing for a compromise between diversity and efficiency. None of these approaches, however, effectively generalize to unseen agents or teams. We present Capability-Aware Shared Hypernetworks (CASH), a novel architecture for heterogeneous multi-agent coordination that generates sufficient diversity while maintaining sample-efficiency via soft parameter-sharing hypernetworks. Intuitively, CASH allows the team to learn common strategies using a shared encoder, which are then adapted according to the team's individual and collective capabilities with a hypernetwork, allowing for zero-shot generalization to unseen teams and agents. We present experiments across two heterogeneous coordination tasks and three standard learning paradigms (imitation learning, on- and off-policy reinforcement learning). CASH is able to outperform baseline architectures in success rate and sample efficiency when evaluated on unseen teams and agents despite using less than half of the learnable parameters.
Generalization of Heterogeneous Multi-Robot Policies via Awareness and Communication of Capabilities
Jan 23, 2024Recent advances in multi-agent reinforcement learning (MARL) are enabling impressive coordination in heterogeneous multi-robot teams. However, existing approaches often overlook the challenge of generalizing learned policies to teams of new compositions, sizes, and robots. While such generalization might not be important in teams of virtual agents that can retrain policies on-demand, it is pivotal in multi-robot systems that are deployed in the real-world and must readily adapt to inevitable changes. As such, multi-robot policies must remain robust to team changes -- an ability we call adaptive teaming. In this work, we investigate if awareness and communication of robot capabilities can provide such generalization by conducting detailed experiments involving an established multi-robot test bed. We demonstrate that shared decentralized policies, that enable robots to be both aware of and communicate their capabilities, can achieve adaptive teaming by implicitly capturing the fundamental relationship between collective capabilities and effective coordination. Videos of trained policies can be viewed at: https://sites.google.com/view/cap-comm
Side Auth: Synthesizing Virtual Sensors for Authentication
Jan 27, 2023While the embedded security research community aims to protect systems by reducing analog sensor side channels, our work argues that sensor side channels can be beneficial to defenders. This work introduces the general problem of synthesizing virtual sensors from existing circuits to authenticate physical sensors' measurands. We investigate how to apply this approach and present a preliminary analytical framework and definitions for sensor side channels. To illustrate the general concept, we provide a proof-of-concept case study to synthesize a virtual inertial measurement unit from a camera motion side channel. Our work also provides an example of applying this technique to protect facial recognition against silicon mask spoofing attacks. Finally, we discuss downstream problems of how to ensure that side channels benefit the defender, but not the adversary, during authentication.
Side Eye: Characterizing the Limits of POV Acoustic Eavesdropping from Smartphone Cameras with Rolling Shutters and Movable Lenses
Jan 26, 2023



Our research discovers how the rolling shutter and movable lens structures widely found in smartphone cameras modulate structure-borne sounds onto camera images, creating a point-of-view (POV) optical-acoustic side channel for acoustic eavesdropping. The movement of smartphone camera hardware leaks acoustic information because images unwittingly modulate ambient sound as imperceptible distortions. Our experiments find that the side channel is further amplified by intrinsic behaviors of Complementary metal-oxide-semiconductor (CMOS) rolling shutters and movable lenses such as in Optical Image Stabilization (OIS) and Auto Focus (AF). Our paper characterizes the limits of acoustic information leakage caused by structure-borne sound that perturbs the POV of smartphone cameras. In contrast with traditional optical-acoustic eavesdropping on vibrating objects, this side channel requires no line of sight and no object within the camera's field of view (images of a ceiling suffice). Our experiments test the limits of this side channel with a novel signal processing pipeline that extracts and recognizes the leaked acoustic information. Our evaluation with 10 smartphones on a spoken digit dataset reports 80.66%, 91.28%, and 99.67% accuracies on recognizing 10 spoken digits, 20 speakers, and 2 genders respectively. We further systematically discuss the possible defense strategies and implementations. By modeling, measuring, and demonstrating the limits of acoustic eavesdropping from smartphone camera image streams, our contributions explain the physics-based causality and possible ways to reduce the threat on current and future devices.
Private Eye: On the Limits of Textual Screen Peeking via Eyeglass Reflections in Video Conferencing
May 08, 2022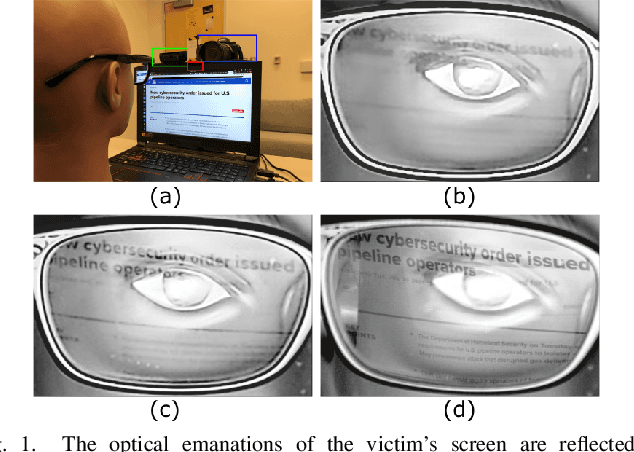

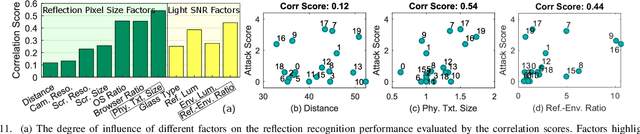
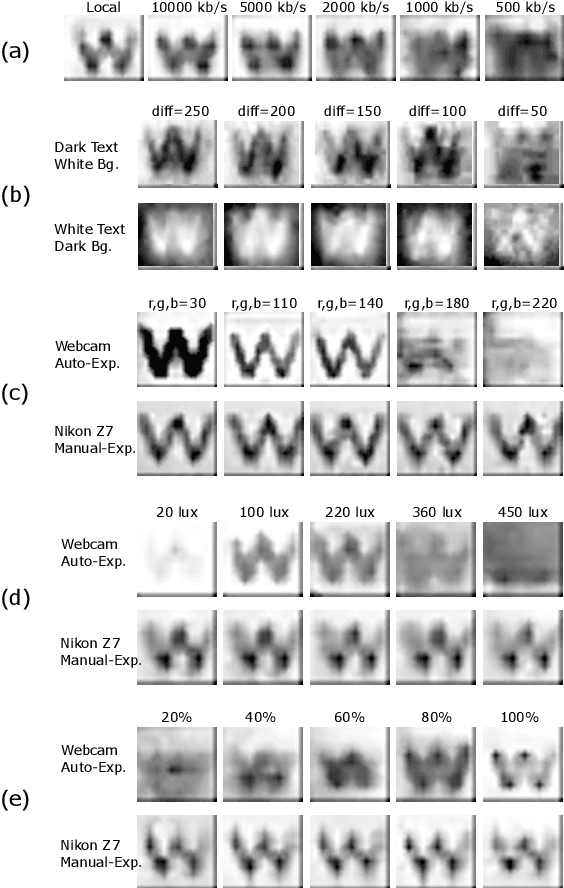
Personal video conferencing has become the new norm after COVID-19 caused a seismic shift from in-person meetings and phone calls to video conferencing for daily communications and sensitive business. Video leaks participants' on-screen information because eyeglasses and other reflective objects unwittingly expose partial screen contents. Using mathematical modeling and human subjects experiments, this research explores the extent to which emerging webcams might leak recognizable textual information gleamed from eyeglass reflections captured by webcams. The primary goal of our work is to measure, compute, and predict the factors, limits, and thresholds of recognizability as webcam technology evolves in the future. Our work explores and characterizes the viable threat models based on optical attacks using multi-frame super resolution techniques on sequences of video frames. Our experimental results and models show it is possible to reconstruct and recognize on-screen text with a height as small as 10 mm with a 720p webcam. We further apply this threat model to web textual content with varying attacker capabilities to find thresholds at which text becomes recognizable. Our user study with 20 participants suggests present-day 720p webcams are sufficient for adversaries to reconstruct textual content on big-font websites. Our models further show that the evolution toward 4K cameras will tip the threshold of text leakage to reconstruction of most header texts on popular websites. Our research proposes near-term mitigations, and justifies the importance of following the principle of least privilege for long-term defense against this attack. For privacy-sensitive scenarios, it's further recommended to develop technologies that blur all objects by default, then only unblur what is absolutely necessary to facilitate natural-looking conversations.
Adversarial Sensor Attack on LiDAR-based Perception in Autonomous Driving
Aug 20, 2019

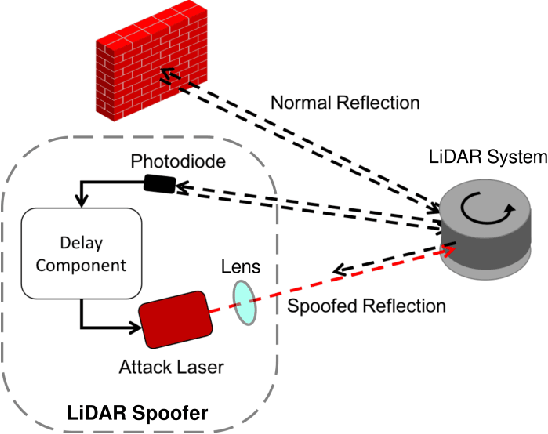
In Autonomous Vehicles (AVs), one fundamental pillar is perception, which leverages sensors like cameras and LiDARs (Light Detection and Ranging) to understand the driving environment. Due to its direct impact on road safety, multiple prior efforts have been made to study its the security of perception systems. In contrast to prior work that concentrates on camera-based perception, in this work we perform the first security study of LiDAR-based perception in AV settings, which is highly important but unexplored. We consider LiDAR spoofing attacks as the threat model and set the attack goal as spoofing obstacles close to the front of a victim AV. We find that blindly applying LiDAR spoofing is insufficient to achieve this goal due to the machine learning-based object detection process. Thus, we then explore the possibility of strategically controlling the spoofed attack to fool the machine learning model. We formulate this task as an optimization problem and design modeling methods for the input perturbation function and the objective function. We also identify the inherent limitations of directly solving the problem using optimization and design an algorithm that combines optimization and global sampling, which improves the attack success rates to around 75%. As a case study to understand the attack impact at the AV driving decision level, we construct and evaluate two attack scenarios that may damage road safety and mobility. We also discuss defense directions at the AV system, sensor, and machine learning model levels.