 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Flexible Heterogeneous Coordination with Capability-Aware Shared Hypernetworks
Jan 10, 2025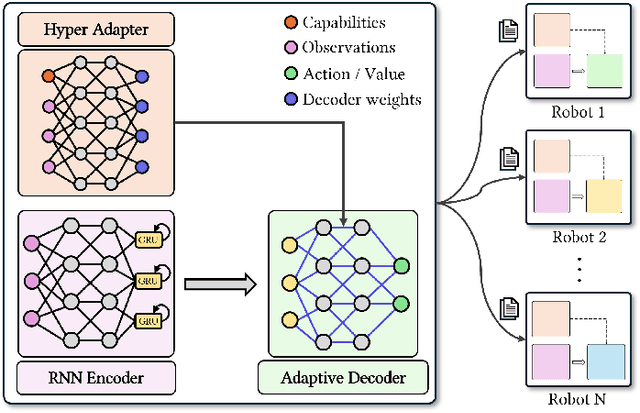
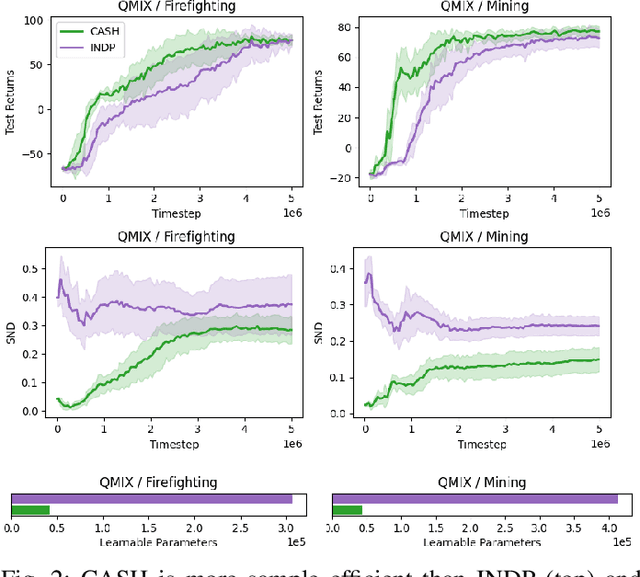
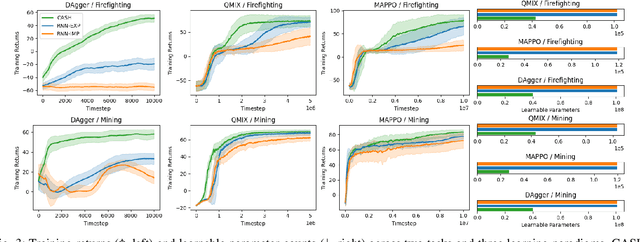
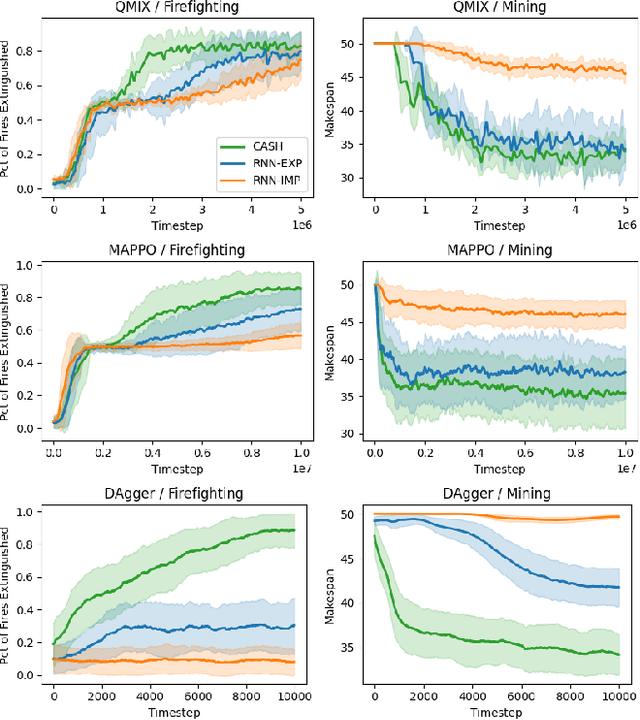
Cooperative heterogeneous multi-agent tasks require agents to effectively coordinate their behaviors while accounting for their relative capabilities. Learning-based solutions to this challenge span between two extremes: i) shared-parameter methods, which encode diverse behaviors within a single architecture by assigning an ID to each agent, and are sample-efficient but result in limited behavioral diversity; ii) independent methods, which learn a separate policy for each agent, and show greater behavioral diversity but lack sample-efficiency. Prior work has also explored selective parameter-sharing, allowing for a compromise between diversity and efficiency. None of these approaches, however, effectively generalize to unseen agents or teams. We present Capability-Aware Shared Hypernetworks (CASH), a novel architecture for heterogeneous multi-agent coordination that generates sufficient diversity while maintaining sample-efficiency via soft parameter-sharing hypernetworks. Intuitively, CASH allows the team to learn common strategies using a shared encoder, which are then adapted according to the team's individual and collective capabilities with a hypernetwork, allowing for zero-shot generalization to unseen teams and agents. We present experiments across two heterogeneous coordination tasks and three standard learning paradigms (imitation learning, on- and off-policy reinforcement learning). CASH is able to outperform baseline architectures in success rate and sample efficiency when evaluated on unseen teams and agents despite using less than half of the learnable parameters.
Generalization of Heterogeneous Multi-Robot Policies via Awareness and Communication of Capabilities
Jan 23, 2024Recent advances in multi-agent reinforcement learning (MARL) are enabling impressive coordination in heterogeneous multi-robot teams. However, existing approaches often overlook the challenge of generalizing learned policies to teams of new compositions, sizes, and robots. While such generalization might not be important in teams of virtual agents that can retrain policies on-demand, it is pivotal in multi-robot systems that are deployed in the real-world and must readily adapt to inevitable changes. As such, multi-robot policies must remain robust to team changes -- an ability we call adaptive teaming. In this work, we investigate if awareness and communication of robot capabilities can provide such generalization by conducting detailed experiments involving an established multi-robot test bed. We demonstrate that shared decentralized policies, that enable robots to be both aware of and communicate their capabilities, can achieve adaptive teaming by implicitly capturing the fundamental relationship between collective capabilities and effective coordination. Videos of trained policies can be viewed at: https://sites.google.com/view/cap-comm
The Effects of Robot Motion on Comfort Dynamics of Novice Users in Close-Proximity Human-Robot Interaction
Aug 02, 2023Effective and fluent close-proximity human-robot interaction requires understanding how humans get habituated to robots and how robot motion affects human comfort. While prior work has identified humans' preferences over robot motion characteristics and studied their influence on comfort, we are yet to understand how novice first-time robot users get habituated to robots and how robot motion impacts the dynamics of comfort over repeated interactions. To take the first step towards such understanding, we carry out a user study to investigate the connections between robot motion and user comfort and habituation. Specifically, we study the influence of workspace overlap, end-effector speed, and robot motion legibility on overall comfort and its evolution over repeated interactions. Our analyses reveal that workspace overlap, in contrast to speed and legibility, has a significant impact on users' perceived comfort and habituation. In particular, lower workspace overlap leads to users reporting significantly higher overall comfort, lower variations in comfort, and fewer fluctuations in comfort levels during habituation.
Fast Anticipatory Motion Planning for Close-Proximity Human-Robot Interaction
May 19, 2023


Effective close-proximity human-robot interaction (CP-HRI) requires robots to be able to both efficiently perform tasks as well as adapt to human behavior and preferences. However, this ability is mediated by many, sometimes competing, aspects of interaction. We propose a real-time motion-planning framework for robotic manipulators that can simultaneously optimize a set of both task- and human-centric cost functions. To this end, we formulate a Nonlinear Model-Predictive Control (NMPC) problem with kino-dynamic constraints and efficiently solve it by leveraging recent advances in nonlinear trajectory optimization. We employ stochastic predictions of the human partner's trajectories in order to adapt the robot's nominal behavior in anticipation of its human partner. Our framework explicitly models and allows balancing of different task- and human-centric cost functions. While previous approaches to trajectory optimization for CP-HRI take anywhere from several seconds to a full minute to compute a trajectory, our approach is capable of computing one in 318 ms on average, enabling real-time implementation. We illustrate the effectiveness of our framework by simultaneously optimizing for separation distance, end-effector visibility, legibility, smoothness, and deviation from nominal behavior. We also demonstrate that our approach performs comparably to prior work in terms of the chosen cost functions, while significantly improving computational efficiency.