 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmulating Brain-like Rapid Learning in Neuromorphic Edge Computing
Aug 28, 2024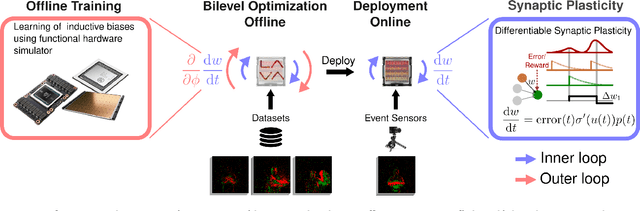
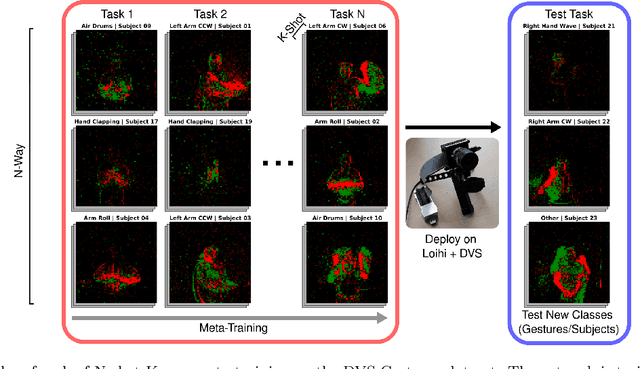

Achieving personalized intelligence at the edge with real-time learning capabilities holds enormous promise in enhancing our daily experiences and helping decision making, planning, and sensing. However, efficient and reliable edge learning remains difficult with current technology due to the lack of personalized data, insufficient hardware capabilities, and inherent challenges posed by online learning. Over time and across multiple developmental stages, the brain has evolved to efficiently incorporate new knowledge by gradually building on previous knowledge. In this work, we emulate the multiple stages of learning with digital neuromorphic technology that simulates the neural and synaptic processes of the brain using two stages of learning. First, a meta-training stage trains the hyperparameters of synaptic plasticity for one-shot learning using a differentiable simulation of the neuromorphic hardware. This meta-training process refines a hardware local three-factor synaptic plasticity rule and its associated hyperparameters to align with the trained task domain. In a subsequent deployment stage, these optimized hyperparameters enable fast, data-efficient, and accurate learning of new classes. We demonstrate our approach using event-driven vision sensor data and the Intel Loihi neuromorphic processor with its plasticity dynamics, achieving real-time one-shot learning of new classes that is vastly improved over transfer learning. Our methodology can be deployed with arbitrary plasticity models and can be applied to situations demanding quick learning and adaptation at the edge, such as navigating unfamiliar environments or learning unexpected categories of data through user engagement.
NeuroBench: Advancing Neuromorphic Computing through Collaborative, Fair and Representative Benchmarking
Apr 15, 2023



The field of neuromorphic computing holds great promise in terms of advancing computing efficiency and capabilities by following brain-inspired principles. However, the rich diversity of techniques employed in neuromorphic research has resulted in a lack of clear standards for benchmarking, hindering effective evaluation of the advantages and strengths of neuromorphic methods compared to traditional deep-learning-based methods. This paper presents a collaborative effort, bringing together members from academia and the industry, to define benchmarks for neuromorphic computing: NeuroBench. The goals of NeuroBench are to be a collaborative, fair, and representative benchmark suite developed by the community, for the community. In this paper, we discuss the challenges associated with benchmarking neuromorphic solutions, and outline the key features of NeuroBench. We believe that NeuroBench will be a significant step towards defining standards that can unify the goals of neuromorphic computing and drive its technological progress. Please visit neurobench.ai for the latest updates on the benchmark tasks and metrics.
Meta-learning Spiking Neural Networks with Surrogate Gradient Descent
Jan 26, 2022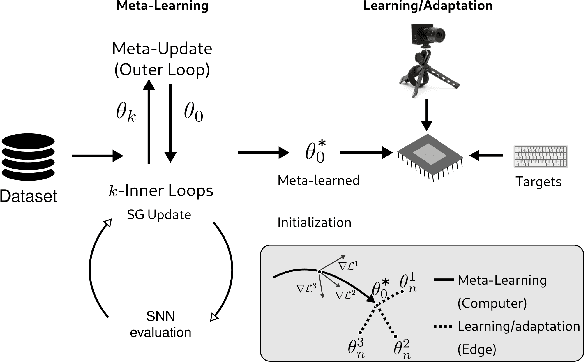
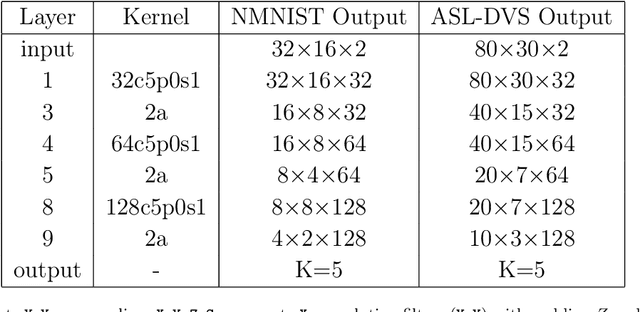
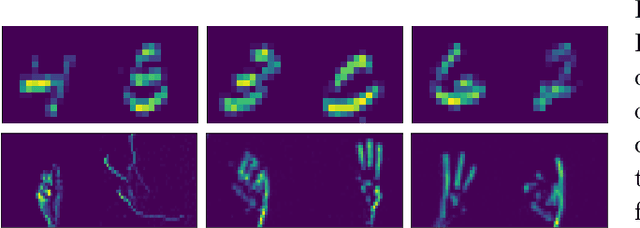
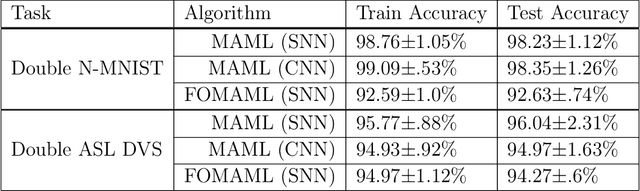
Adaptive "life-long" learning at the edge and during online task performance is an aspirational goal of AI research. Neuromorphic hardware implementing Spiking Neural Networks (SNNs) are particularly attractive in this regard, as their real-time, event-based, local computing paradigm makes them suitable for edge implementations and fast learning. However, the long and iterative learning that characterizes state-of-the-art SNN training is incompatible with the physical nature and real-time operation of neuromorphic hardware. Bi-level learning, such as meta-learning is increasingly used in deep learning to overcome these limitations. In this work, we demonstrate gradient-based meta-learning in SNNs using the surrogate gradient method that approximates the spiking threshold function for gradient estimations. Because surrogate gradients can be made twice differentiable, well-established, and effective second-order gradient meta-learning methods such as Model Agnostic Meta Learning (MAML) can be used. We show that SNNs meta-trained using MAML match or exceed the performance of conventional ANNs meta-trained with MAML on event-based meta-datasets. Furthermore, we demonstrate the specific advantages that accrue from meta-learning: fast learning without the requirement of high precision weights or gradients. Our results emphasize how meta-learning techniques can become instrumental for deploying neuromorphic learning technologies on real-world problems.
Gesture Similarity Analysis on Event Data Using a Hybrid Guided Variational Auto Encoder
Mar 31, 2021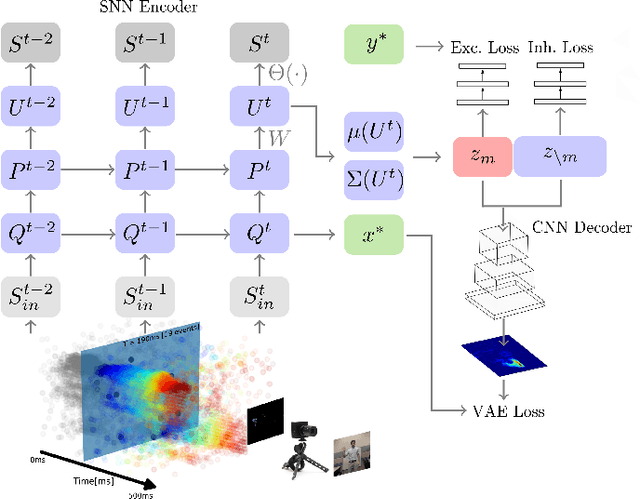
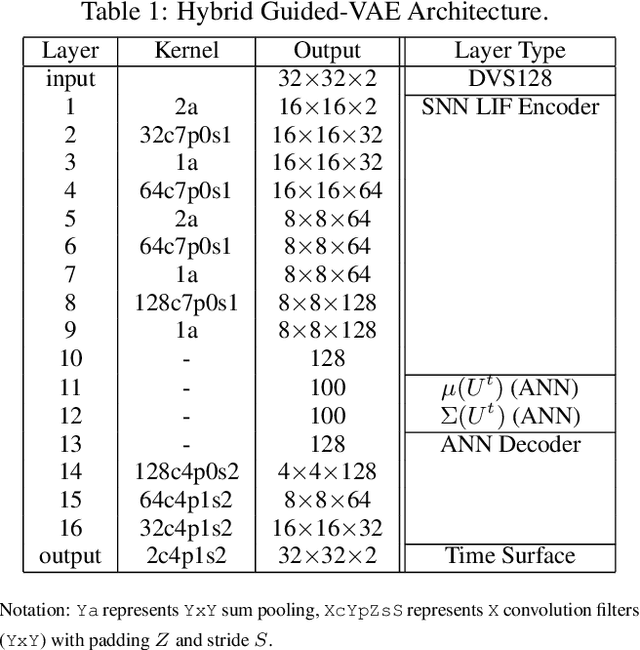
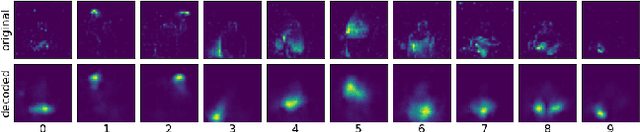
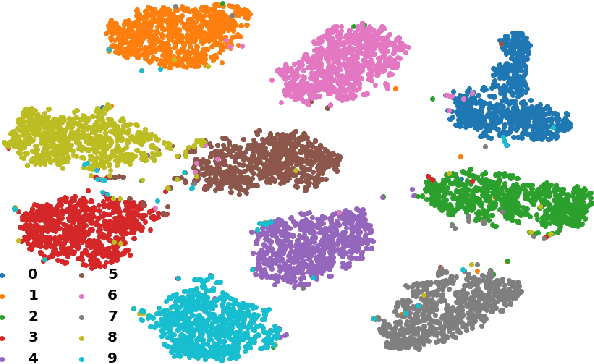
While commercial mid-air gesture recognition systems have existed for at least a decade, they have not become a widespread method of interacting with machines. This is primarily due to the fact that these systems require rigid, dramatic gestures to be performed for accurate recognition that can be fatiguing and unnatural. The global pandemic has seen a resurgence of interest in touchless interfaces, so new methods that allow for natural mid-air gestural interactions are even more important. To address the limitations of recognition systems, we propose a neuromorphic gesture analysis system which naturally declutters the background and analyzes gestures at high temporal resolution. Our novel model consists of an event-based guided Variational Autoencoder (VAE) which encodes event-based data sensed by a Dynamic Vision Sensor (DVS) into a latent space representation suitable to analyze and compute the similarity of mid-air gesture data. Our results show that the features learned by the VAE provides a similarity measure capable of clustering and pseudo labeling of new gestures. Furthermore, we argue that the resulting event-based encoder and pseudo-labeling system are suitable for implementation in neuromorphic hardware for online adaptation and learning of natural mid-air gestures.
One-Shot Federated Learning with Neuromorphic Processors
Nov 01, 2020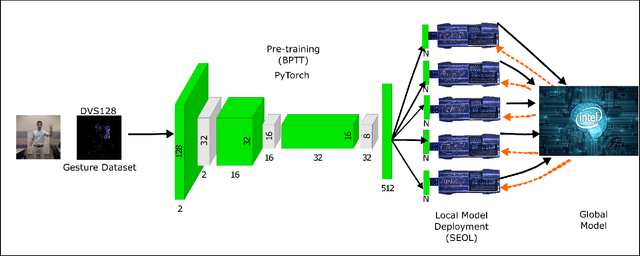
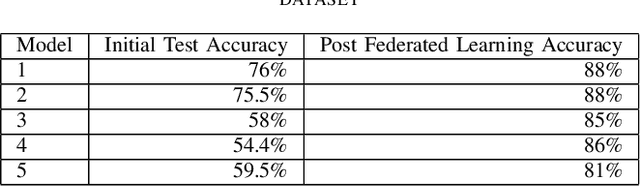
Being very low power, the use of neuromorphic processors in mobile devices to solve machine learning problems is a promising alternative to traditional Von Neumann processors. Federated Learning enables entities such as mobile devices to collaboratively learn a shared model while keeping their training data local. Additionally, federated learning is a secure way of learning because only the model weights need to be shared between models, keeping the data private. Here we demonstrate the efficacy of federated learning in neuromorphic processors. Neuromorphic processors benefit from the collaborative learning, achieving state of the art accuracy on a one-shot learning gesture recognition task across individual processor models while preserving local data privacy.
Online Few-shot Gesture Learning on a Neuromorphic Processor
Aug 03, 2020
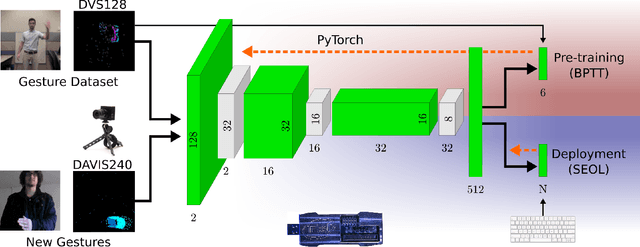
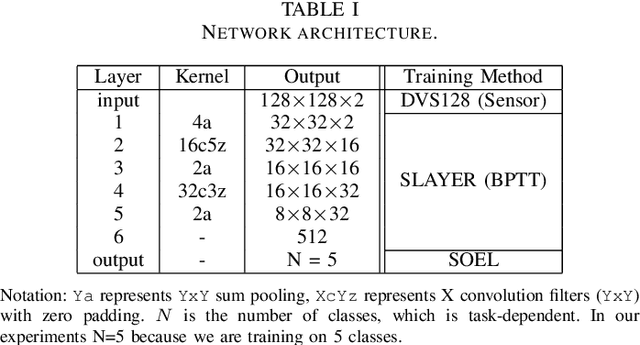
We present the Surrogate-gradient Online Error-triggered Learning (SOEL) system for online few-shot learningon neuromorphic processors. The SOEL learning system usesa combination of transfer learning and principles of computa-tional neuroscience and deep learning. We show that partiallytrained deep Spiking Neural Networks (SNNs) implemented onneuromorphic hardware can rapidly adapt online to new classesof data within a domain. SOEL updates trigger when an erroroccurs, enabling faster learning with fewer updates. Using gesturerecognition as a case study, we show SOEL can be used for onlinefew-shot learning of new classes of pre-recorded gesture data andrapid online learning of new gestures from data streamed livefrom a Dynamic Active-pixel Vision Sensor to an Intel Loihineuromorphic research processor.
On-chip Few-shot Learning with Surrogate Gradient Descent on a Neuromorphic Processor
Nov 05, 2019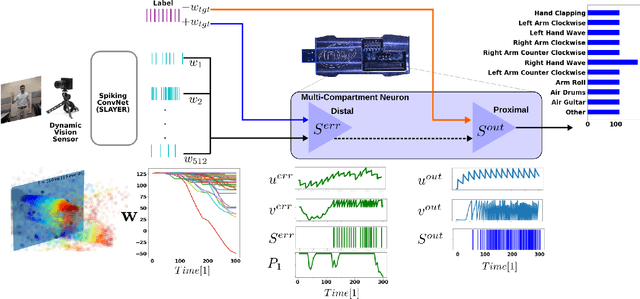
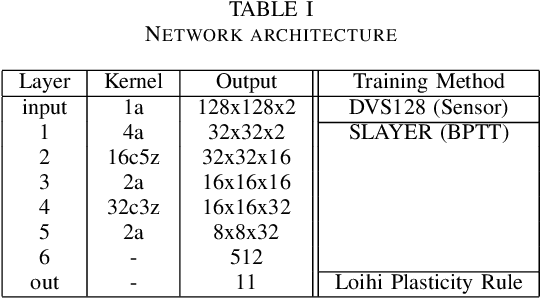
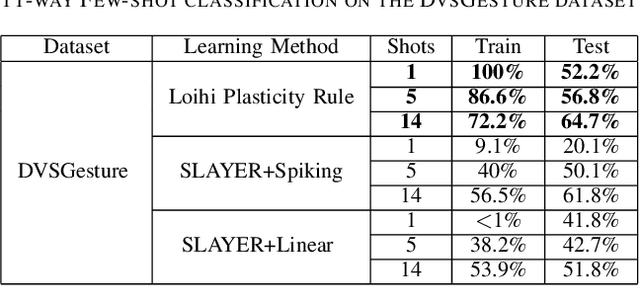
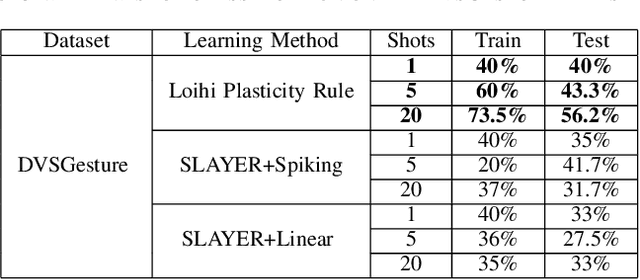
Recent work suggests that synaptic plasticity dynamics in biological models of neurons and neuromorphic hardware are compatible with gradient-based learning (Neftci et al., 2019). Gradient-based learning requires iterating several times over a dataset, which is both time-consuming and constrains the training samples to be independently and identically distributed. This is incompatible with learning systems that do not have boundaries between training and inference, such as in neuromorphic hardware. One approach to overcome these constraints is transfer learning, where a portion of the network is pre-trained and mapped into hardware and the remaining portion is trained online. Transfer learning has the advantage that pre-training can be accelerated offline if the task domain is known, and few samples of each class are sufficient for learning the target task at reasonable accuracies. Here, we demonstrate on-line surrogate gradient few-shot learning on Intel's Loihi neuromorphic research processor using features pre-trained with spike-based gradient backpropagation-through-time. Our experimental results show that the Loihi chip can learn gestures online using a small number of shots and achieve results that are comparable to the models simulated on a conventional processor.