 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time Model Predictive Control and System Identification Using Differentiable Physics Simulation
Feb 20, 2022
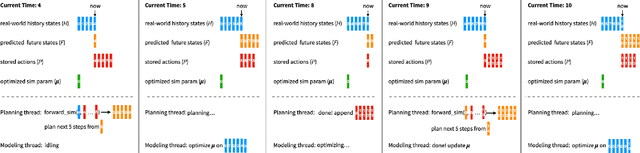
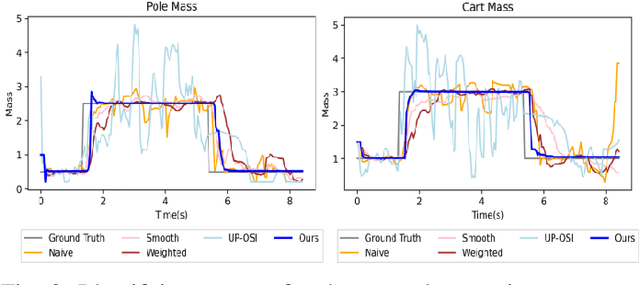
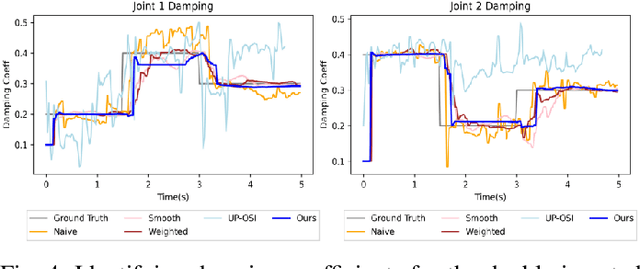
Developing robot controllers in a simulated environment is advantageous but transferring the controllers to the target environment presents challenges, often referred to as the "sim-to-real gap". We present a method for continuous improvement of modeling and control after deploying the robot to a dynamically-changing target environment. We develop a differentiable physics simulation framework that performs online system identification and optimal control simultaneously, using the incoming observations from the target environment in real time. To ensure robust system identification against noisy observations, we devise an algorithm to assess the confidence of our estimated parameters, using numerical analysis of the dynamic equations. To ensure real-time optimal control, we adaptively schedule the optimization window in the future so that the optimized actions can be replenished faster than they are consumed, while staying as up-to-date with new sensor information as possible. The constant re-planning based on a constantly improved model allows the robot to swiftly adapt to the changing environment and utilize real-world data in the most sample-efficient way. Thanks to a fast differentiable physics simulator, the optimization for both system identification and control can be solved efficiently for robots operating in real time. We demonstrate our method on a set of examples in simulation and show that our results are favorable compared to baseline methods.
Fast and Feature-Complete Differentiable Physics for Articulated Rigid Bodies with Contact
Apr 01, 2021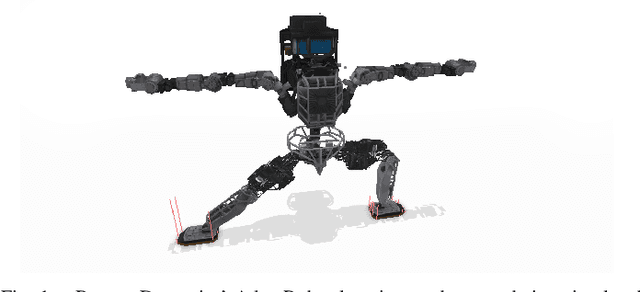
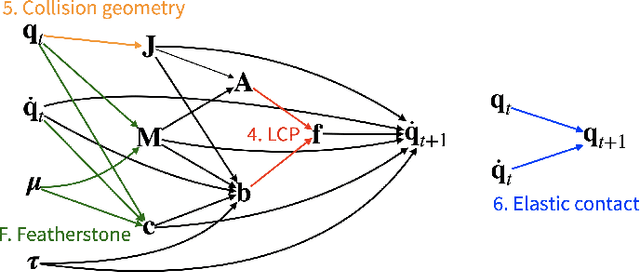
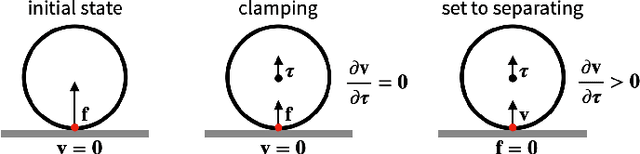
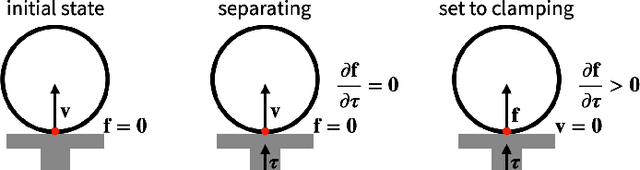
We present a fast and feature-complete differentiable physics engine that supports Lagrangian dynamics and hard contact constraints for articulated rigid body simulation. Our differentiable physics engine offers a complete set of features that are typically only available in non-differentiable physics simulators commonly used by robotics applications. We solve contact constraints precisely using linear complementarity problems (LCPs). We present efficient and novel analytical gradients through the LCP formulation of inelastic contact that exploit the sparsity of the LCP solution. We support complex contact geometry, and gradients approximating continuous-time elastic collision. We also introduce a novel method to compute complementarity-aware gradients that help downstream optimization tasks avoid stalling in saddle points. We show that an implementation of this combination in an existing physics engine (DART) is capable of a 45x single-core speedup over finite-differencing in computing analytical Jacobians for a single timestep, while preserving all the expressiveness of original DART.
On-the-Job Learning with Bayesian Decision Theory
Dec 07, 2015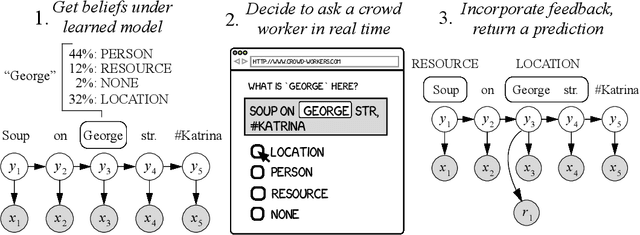
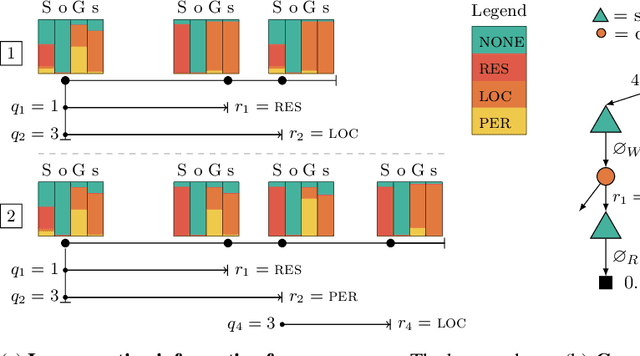
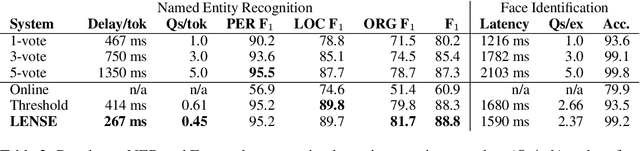
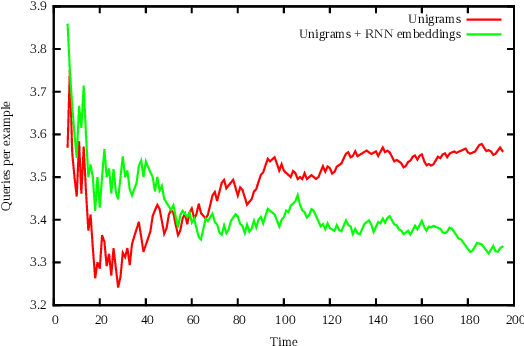
Our goal is to deploy a high-accuracy system starting with zero training examples. We consider an "on-the-job" setting, where as inputs arrive, we use real-time crowdsourcing to resolve uncertainty where needed and output our prediction when confident. As the model improves over time, the reliance on crowdsourcing queries decreases. We cast our setting as a stochastic game based on Bayesian decision theory, which allows us to balance latency, cost, and accuracy objectives in a principled way. Computing the optimal policy is intractable, so we develop an approximation based on Monte Carlo Tree Search. We tested our approach on three datasets---named-entity recognition, sentiment classification, and image classification. On the NER task we obtained more than an order of magnitude reduction in cost compared to full human annotation, while boosting performance relative to the expert provided labels. We also achieve a 8% F1 improvement over having a single human label the whole set, and a 28% F1 improvement over online learning.
Robust Subgraph Generation Improves Abstract Meaning Representation Parsing
Jun 10, 2015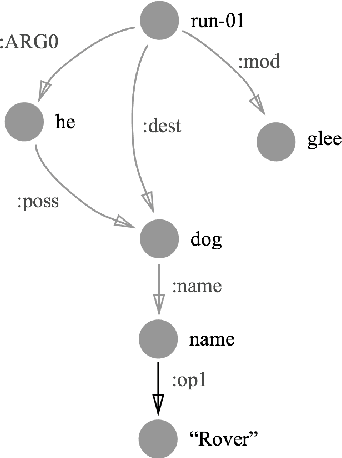

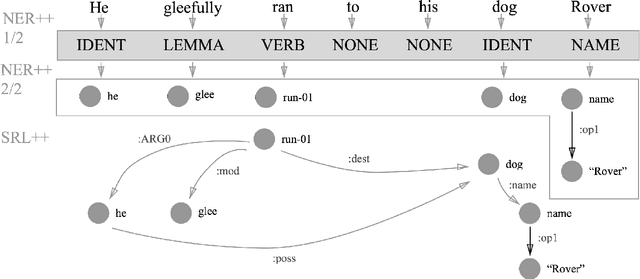
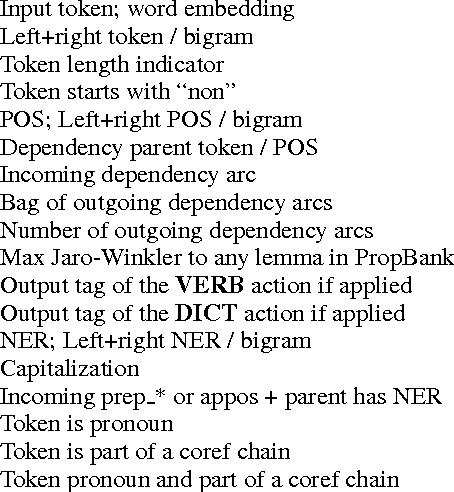
The Abstract Meaning Representation (AMR) is a representation for open-domain rich semantics, with potential use in fields like event extraction and machine translation. Node generation, typically done using a simple dictionary lookup, is currently an important limiting factor in AMR parsing. We propose a small set of actions that derive AMR subgraphs by transformations on spans of text, which allows for more robust learning of this stage. Our set of construction actions generalize better than the previous approach, and can be learned with a simple classifier. We improve on the previous state-of-the-art result for AMR parsing, boosting end-to-end performance by 3 F$_1$ on both the LDC2013E117 and LDC2014T12 datasets.