 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMaintaining the Level of a Payload carried by Multi-Robot System on Irregular Surface
Dec 19, 2025
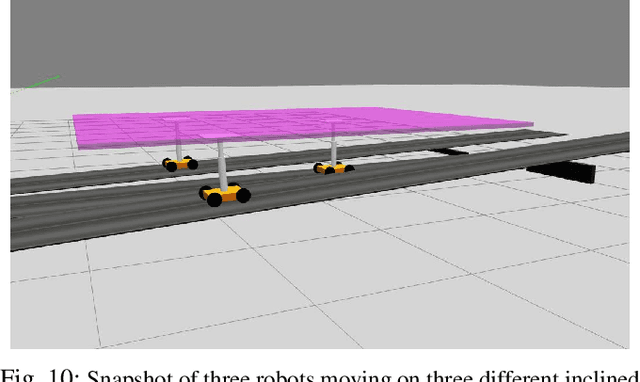


In this paper, we introduce a multi robot payload transport system to carry payloads through an environment of unknown and uneven inclinations while maintaining the desired orientation of the payload. For this task, we used custom built robots with a linear actuator (pistons) mounted on top of each robot. The system continuously monitors the payload's orientation and computes the required piston height of each robot to maintain the desired orientation of the payload. In this work, we propose an open loop controller coupled with a closed loop PID controller to achieve the goal. As our modelling makes no assumptions on the type of terrain, the system can work on any unknown and uneven terrains and inclinations. We showcase the efficacy of our proposed controller by testing it on various simulated environments with varied and complex terrains.
A Case for Competent AI Systems $-$ A Concept Note
Dec 07, 2023The efficiency of an AI system is contingent upon its ability to align with the specified requirements of a given task. How-ever, the inherent complexity of tasks often introduces the potential for harmful implications or adverse actions. This note explores the critical concept of capability within AI systems, representing what the system is expected to deliver. The articulation of capability involves specifying well-defined out-comes. Yet, the achievement of this capability may be hindered by deficiencies in implementation and testing, reflecting a gap in the system's competency (what it can do vs. what it does successfully). A central challenge arises in elucidating the competency of an AI system to execute tasks effectively. The exploration of system competency in AI remains in its early stages, occasionally manifesting as confidence intervals denoting the probability of success. Trust in an AI system hinges on the explicit modeling and detailed specification of its competency, connected intricately to the system's capability. This note explores this gap by proposing a framework for articulating the competency of AI systems. Motivated by practical scenarios such as the Glass Door problem, where an individual inadvertently encounters a glass obstacle due to a failure in their competency, this research underscores the imperative of delving into competency dynamics. Bridging the gap between capability and competency at a detailed level, this note contributes to advancing the discourse on bolstering the reliability of AI systems in real-world applications.
Multi-Robot Formation Control Using Reinforcement Learning
Jan 13, 2020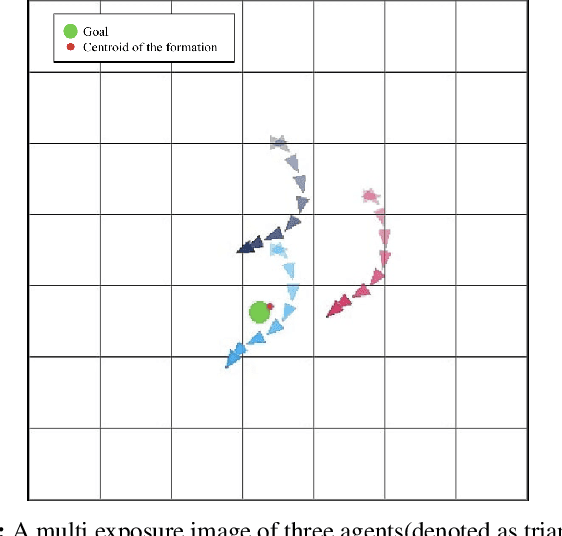
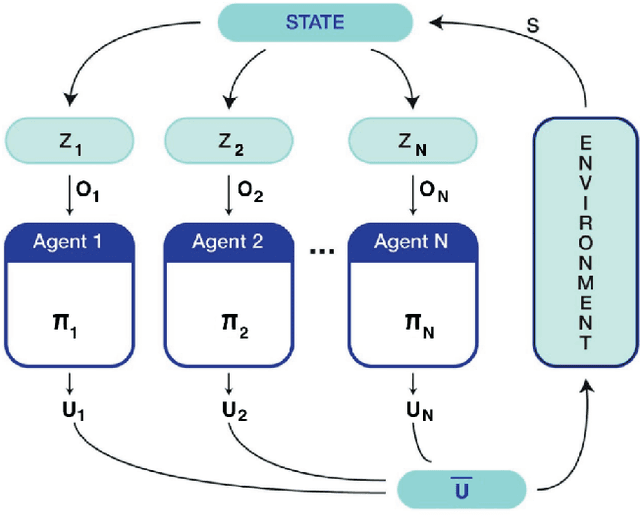
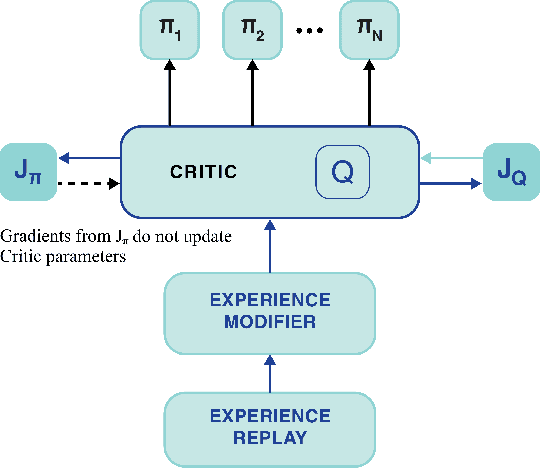
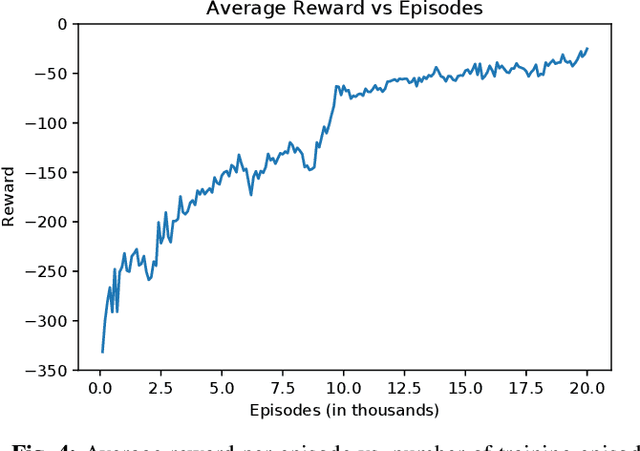
In this paper, we present a machine learning approach to move a group of robots in a formation. We model the problem as a multi-agent reinforcement learning problem. Our aim is to design a control policy for maintaining a desired formation among a number of agents (robots) while moving towards a desired goal. This is achieved by training our agents to track two agents of the group and maintain the formation with respect to those agents. We consider all agents to be homogeneous and model them as unicycle [1]. In contrast to the leader-follower approach, where each agent has an independent goal, our approach aims to train the agents to be cooperative and work towards the common goal. Our motivation to use this method is to make a fully decentralized multi-agent formation system and scalable for a number of agents.
Energy Conscious Over-actuated Multi-Agent Payload Transport Robot: Simulations and Preliminary Physical Validation
Sep 10, 2019



In this work, we consider a multi-wheeled payload transport system. Each of the wheels can be selectively actuated. When they are not actuated, wheels are free moving and do not consume battery power. The payload transport system is modeled as an actuated multi-agent system, with each wheel-motor pair as an agent. Kinematic and dynamic models are developed to ensure that the payload transport system moves as desired. We design optimization formulations to decide on the number of wheels to be active and which of the wheels to be active so that the battery is conserved and the wear on the motors is reduced. Our multi-level control framework over the agents ensures that near-optimal number of agents is active for the payload transport system to function. Through simulation studies we show that our solution ensures energy efficient operation and increases the distance traveled by the payload transport system, for the same battery power. We have built the payload transport system and provide results for preliminary experimental validation.
Traffic Management Strategies for Multi-Robotic Rigid Payload Transport Systems
Jun 27, 2019
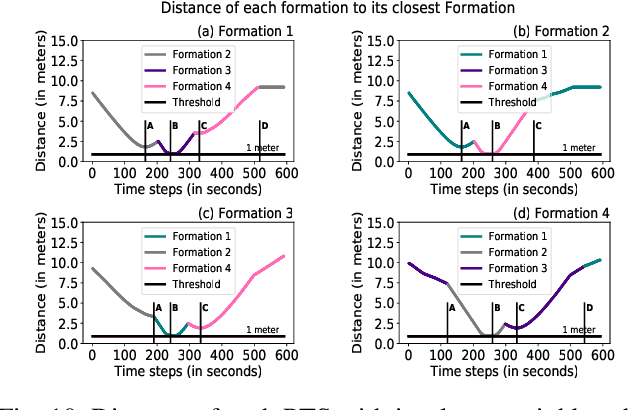
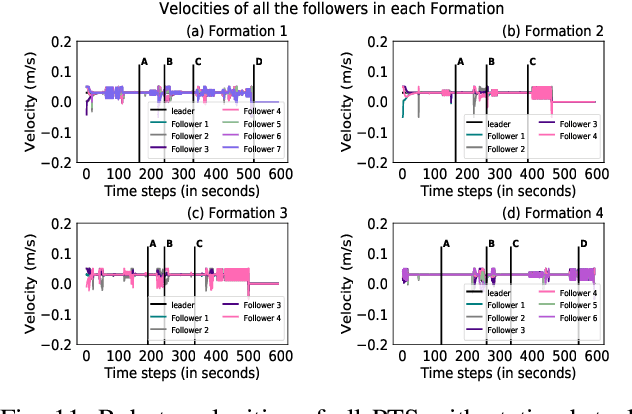
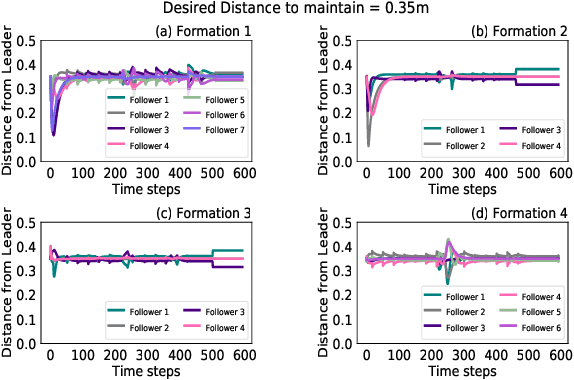
In this work, we address traffic management of multiple payload transport systems comprising of non-holonomic robots. We consider loosely coupled rigid robot formations carrying a payload from one place to another. Each payload transport system (PTS) moves in various kinds of environments with obstacles. We ensure each PTS completes its given task by avoiding collisions with other payload systems and obstacles as well. Each PTS has one leader and multiple followers and the followers maintain a desired distance and angle with respect to the leader using a decentralized leader-follower control architecture while moving in the traffic. We showcase, through simulations the time taken by each PTS to traverse its respective trajectory with and without other PTS and obstacles. We show that our strategies help manage the traffic for a large number of PTS moving from one place to another.
Multiple Drones driven Hexagonally Partitioned Area Exploration: Simulation and Evaluation
Jun 02, 2019



In this paper, we simulated a distributed, cooperative path planning technique for multiple drones ($\sim$200) to explore an unknown region ($\sim$10,000 connected units) in the presence of obstacles. The map of an unknown region is dynamically created based on the information obtained from sensors and other drones. The unknown area is considered as connected region made up of hexagonal unit cells. These cells are grouped to form larger cells called sub-areas. We use two types of communication, one long range and another more frequently used short range communication. The short range communication within drones in smaller proximity helps avoid obstacles and re-exploration of cells already explored by companion drones located in same subarea. The long range communication helps drones identify next sub area to be targeted by individual drones based on weighted RNN (Reverse nearest neighbour).\par Simulation results show that using weighted RNN with two types of communication in a hexagonal representation of subareas makes exploration more efficient, scalable and resilient to communication failures.
Loosely Coupled Payload Transport System with Robot Replacement
Apr 05, 2019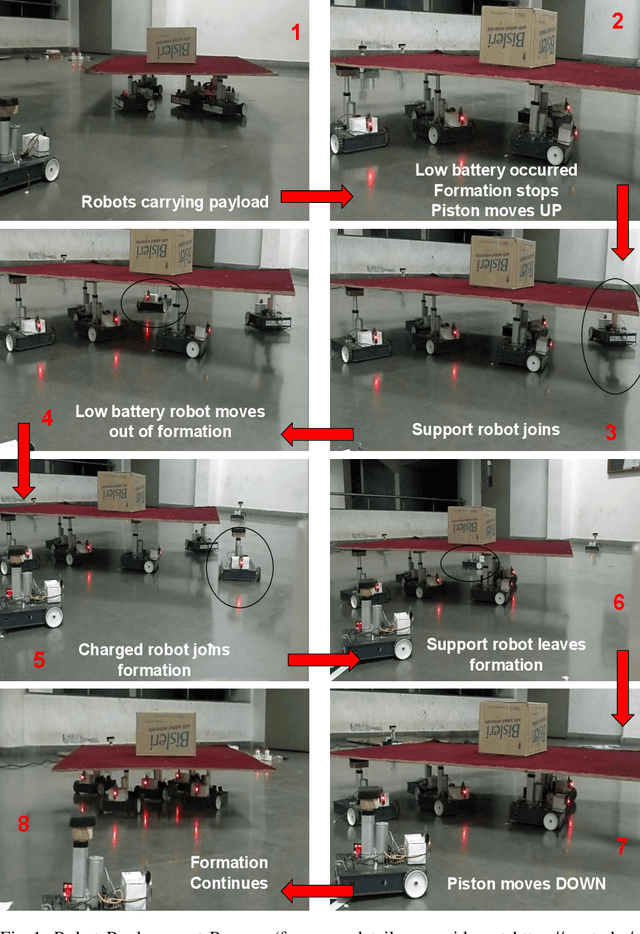
In this work, we present an algorithm for robot replacement to increase the operational time of a multi-robot payload transport system. Our system comprises a group of nonholonomic wheeled mobile robots traversing on a known trajectory. We design a multi-robot system with loosely coupled robots that ensures the system lasts much longer than the battery life of an individual robot. A system level optimization is presented, to decide on the operational state (charging or discharging) of each robot in the system. The charging state implies that the robot is not in a formation and is kept on charge whereas the discharging state implies that the robot is a part of the formation. Robot battery recharge hubs are present along the trajectory. Robots in the formation can be replaced at these hub locations with charged robots using a replacement mechanism. We showcase the efficacy of the proposed scheduling framework through simulations and experiments with real robots.
* 20 Pages
Motion Planning for Multi-Mobile-Manipulator Payload Transport Systems
Mar 18, 2019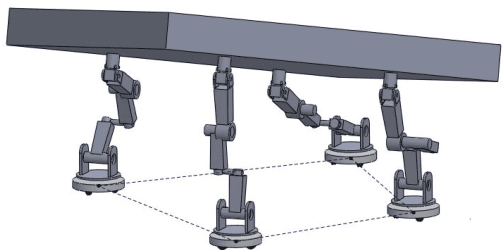
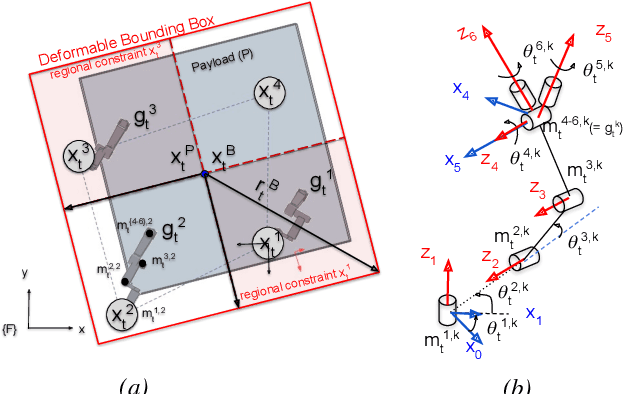
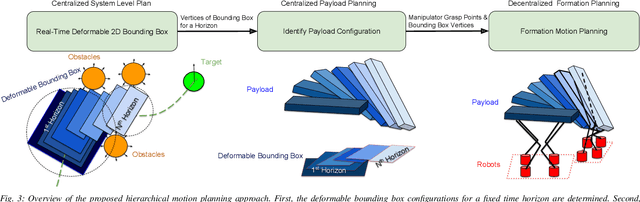
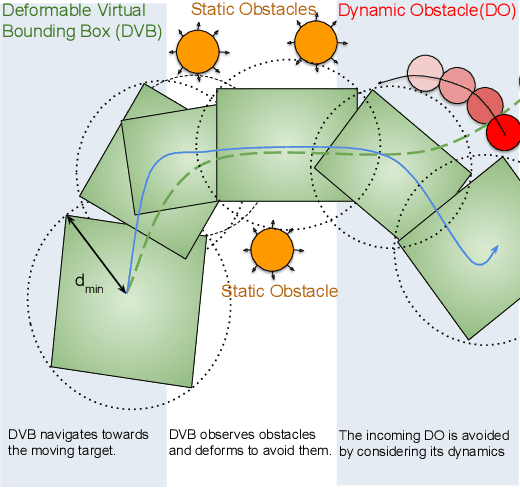
In this paper, a kinematic motion planning algorithm for cooperative spatial payload manipulation is presented. A hierarchical approach is introduced to compute real-time collision-free motion plans for a formation of mobile manipulator robots. Initially, collision-free configurations of a deformable 2-D virtual bounding box are identified, over a planning horizon, to define a convex workspace for the entire system. Then, 3-D payload configurations whose projections lie within the defined convex workspace are computed. Finally, a convex decentralized model-predictive controller is formulated to plan collision-free trajectories for the formation of mobile manipulators. This approach facilitates real-time motion planning for the system and is scalable in the number of robots. The algorithm is validated in simulated dynamic environments. Simulation video: https://youtu.be/9EKj7RwRs_4.
Active Perception based Formation Control for Multiple Aerial Vehicles
Jan 23, 2019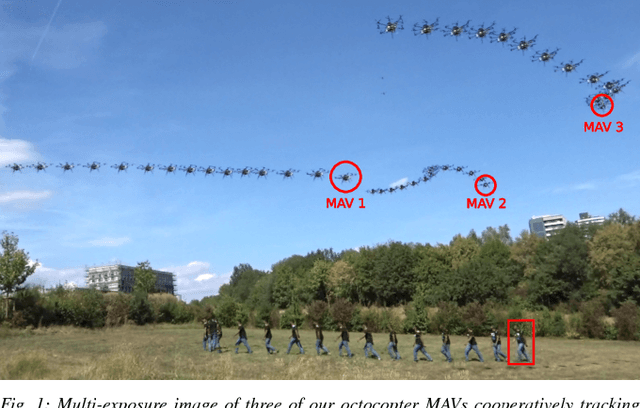
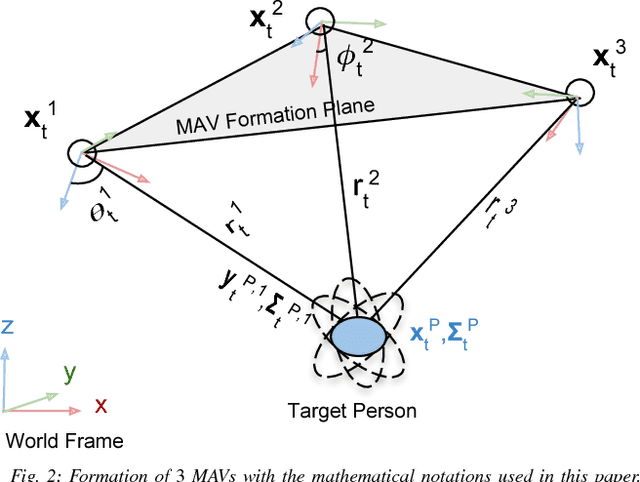
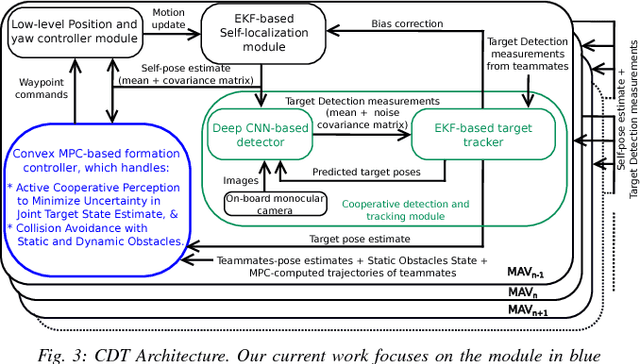
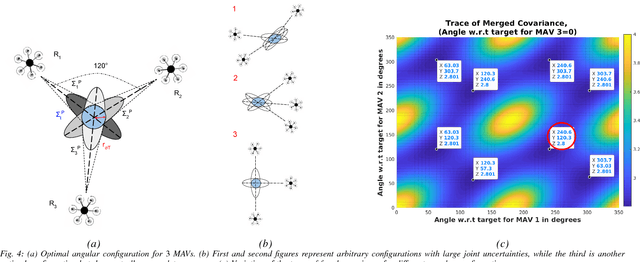
Autonomous motion capture (mocap) systems for outdoor scenarios involving flying or mobile cameras rely on i) a robotic front-end to track and follow a human subject in real-time while he/she performs physical activities, and ii) an algorithmic back-end that estimates full body human pose and shape from the saved videos. In this paper we present a novel front-end for our aerial mocap system that consists of multiple micro aerial vehicles (MAVs) with only on-board cameras and computation. In previous work, we presented an approach for cooperative detection and tracking (CDT) of a subject using multiple MAVs. However, it did not ensure optimal view-point configurations of the MAVs to minimize the uncertainty in the person's cooperatively tracked 3D position estimate. In this article we introduce an active approach for CDT. In contrast to cooperatively tracking only the 3D positions of the person, the MAVs can now actively compute optimal local motion plans, resulting in optimal view-point configurations, which minimize the uncertainty in the tracked estimate. We achieve this by decoupling the goal of active tracking as a convex quadratic objective and non-convex constraints corresponding to angular configurations of the MAVs w.r.t. the person. We derive it using Gaussian observation model assumptions within the CDT algorithm. We also show how we embed all the non-convex constraints, including those for dynamic and static obstacle avoidance, as external control inputs in the MPC dynamics. Multiple real robot experiments and comparisons involving 3 MAVs in several challenging scenarios are presented (video link : https://youtu.be/1qWW2zWvRhA). Extensive simulation results demonstrate the scalability and robustness of our approach. ROS-based source code is also provided.
A hybrid deep learning approach for medical relation extraction
Jun 26, 2018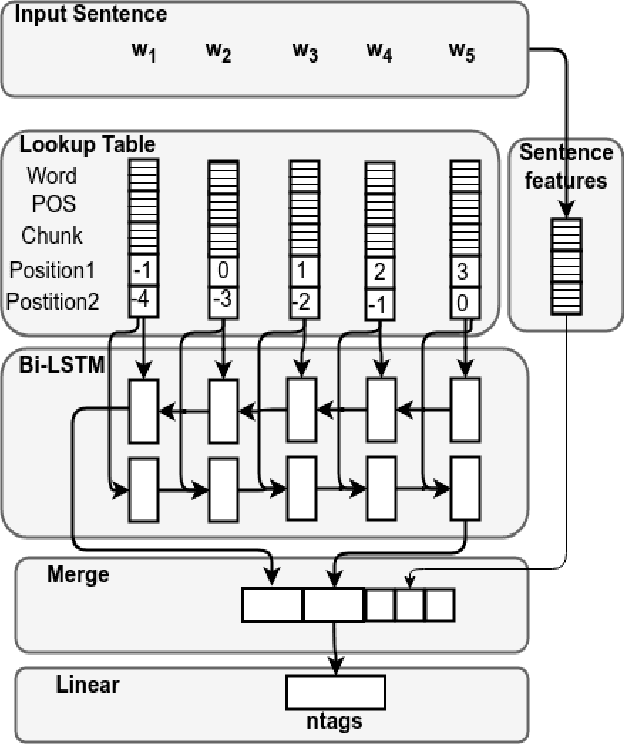
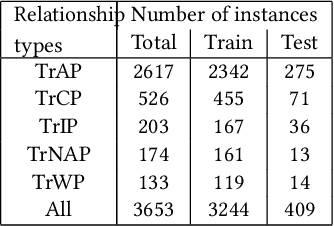


Mining relationships between treatment(s) and medical problem(s) is vital in the biomedical domain. This helps in various applications, such as decision support system, safety surveillance, and new treatment discovery. We propose a deep learning approach that utilizes both word level and sentence-level representations to extract the relationships between treatment and problem. While deep learning techniques demand a large amount of data for training, we make use of a rule-based system particularly for relationship classes with fewer samples. Our final relations are derived by jointly combining the results from deep learning and rule-based models. Our system achieved a promising performance on the relationship classes of I2b2 2010 relation extraction task.
* 4 pages, 4 tables, 1 figure, 2018 KDD workshop on Machine Learning for Medicine and Healthcare