 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMotion Planning for Multi-Mobile-Manipulator Payload Transport Systems
Paper and Code
Mar 18, 2019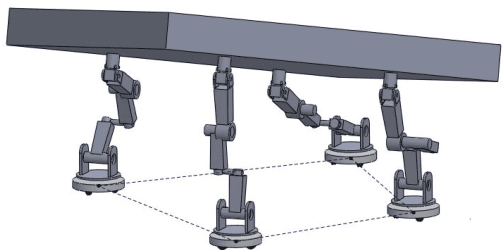
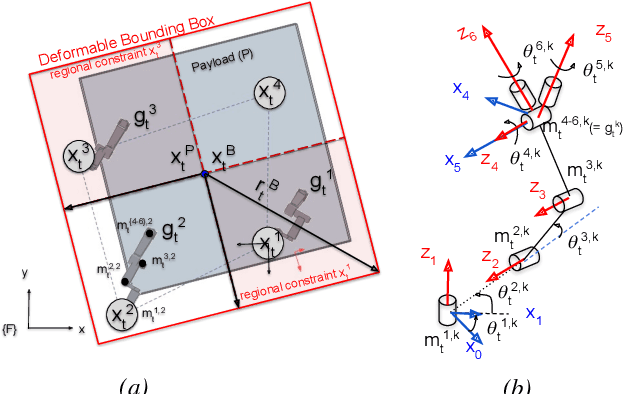
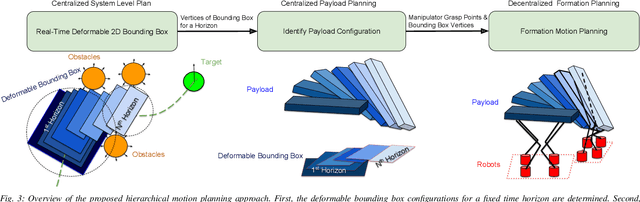
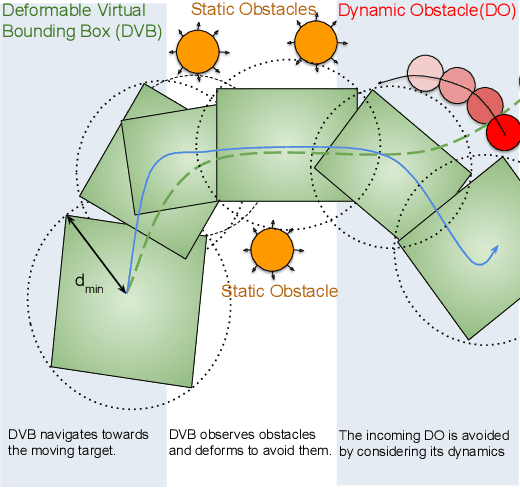
In this paper, a kinematic motion planning algorithm for cooperative spatial payload manipulation is presented. A hierarchical approach is introduced to compute real-time collision-free motion plans for a formation of mobile manipulator robots. Initially, collision-free configurations of a deformable 2-D virtual bounding box are identified, over a planning horizon, to define a convex workspace for the entire system. Then, 3-D payload configurations whose projections lie within the defined convex workspace are computed. Finally, a convex decentralized model-predictive controller is formulated to plan collision-free trajectories for the formation of mobile manipulators. This approach facilitates real-time motion planning for the system and is scalable in the number of robots. The algorithm is validated in simulated dynamic environments. Simulation video: https://youtu.be/9EKj7RwRs_4.