 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-Organizing Aerial Swarm Robotics for Resilient Load Transportation : A Table-Mechanics-Inspired Approach
Sep 03, 2025In comparison with existing approaches, which struggle with scalability, communication dependency, and robustness against dynamic failures, cooperative aerial transportation via robot swarms holds transformative potential for logistics and disaster response. Here, we present a physics-inspired cooperative transportation approach for flying robot swarms that imitates the dissipative mechanics of table-leg load distribution. By developing a decentralized dissipative force model, our approach enables autonomous formation stabilization and adaptive load allocation without the requirement of explicit communication. Based on local neighbor robots and the suspended payload, each robot dynamically adjusts its position. This is similar to energy-dissipating table leg reactions. The stability of the resultant control system is rigorously proved. Simulations demonstrate that the tracking errors of the proposed approach are 20%, 68%, 55.5%, and 21.9% of existing approaches under the cases of capability variation, cable uncertainty, limited vision, and payload variation, respectively. In real-world experiments with six flying robots, the cooperative aerial transportation system achieved a 94% success rate under single-robot failure, disconnection events, 25% payload variation, and 40% cable length uncertainty, demonstrating strong robustness under outdoor winds up to Beaufort scale 4. Overall, this physics-inspired approach bridges swarm intelligence and mechanical stability principles, offering a scalable framework for heterogeneous aerial systems to collectively handle complex transportation tasks in communication-constrained environments.
A Degree of Flowability for Virtual Tubes
Oct 29, 2024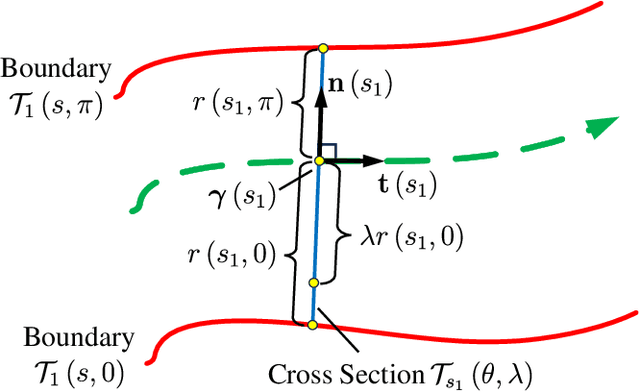
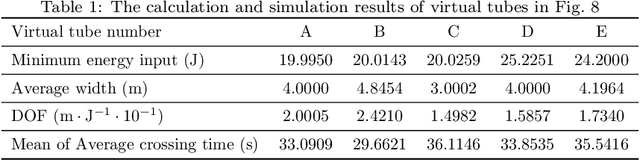
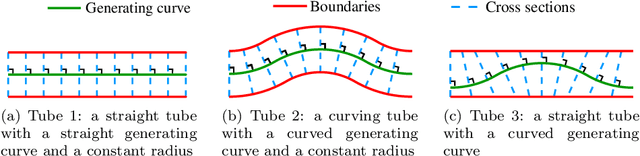
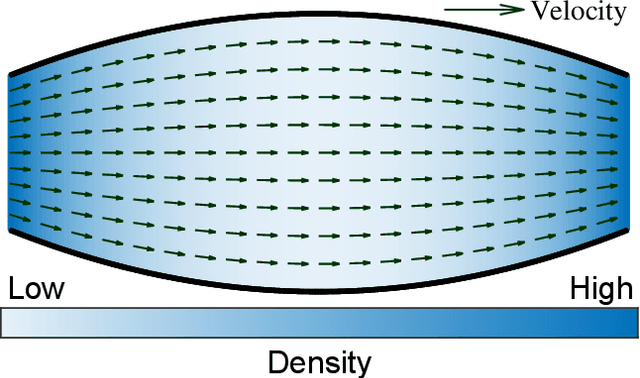
With the rapid development of robotics swarm technology, there are more tasks that require the swarm to pass through complicate environments safely and efficiently. Virtual tube technology is a novel way to achieve this goal. Virtual tubes are free spaces connecting two places that provide safety boundaries and direction of motion for swarm robotics. How to determine the design quality of a virtual tube is a fundamental problem. For such a purpose, this paper presents a degree of flowability (DOF) for two-dimensional virtual tubes according to a minimum energy principle. After that, methods to calculate DOF are proposed with a feasibility analysis. Simulations of swarm robotics in different kinds of two-dimensional virtual tubes are performed to demonstrate the effectiveness of the proposed method of calculating DOF.
Uniform Passive Fault-Tolerant Control of a Quadcopter with One, Two, or Three Rotor Failure
Nov 23, 2022



This study proposes a uniform passive fault-tolerant control (FTC) method for a quadcopter that does not rely on fault information subject to one, two adjacent, two opposite, or three rotors failure. The uniform control implies that the passive FTC is able to cover the condition from quadcopter fault-free to rotor failure without controller switching. To achieve the purpose of the passive FTC, the rotors' fault is modeled as a disturbance acting on the virtual control of the quadcopter system. The disturbance estimate is used directly for the passive FTC with rotor failure. To avoid controller switching between normal control and FTC, a dynamic control allocation is used. In addition, the closed-loop stability has been analyzed and a virtual control feedback is adopted to achieve the passive FTC for the quadcopter with two and three rotor failure. To validate the proposed uniform passive FTC method, outdoor experiments are performed for the first time, which have demonstrated that the hovering quadcopter is able to recover from one rotor failure by the proposed controller and continue to fly even if two adjacent, two opposite, or three rotors fail, without any rotor fault information and controller switching.
A Control with Patterns Approach for the Stability Issue of Dynamical Systems Operating in Data-Rich Environments
Jun 08, 2022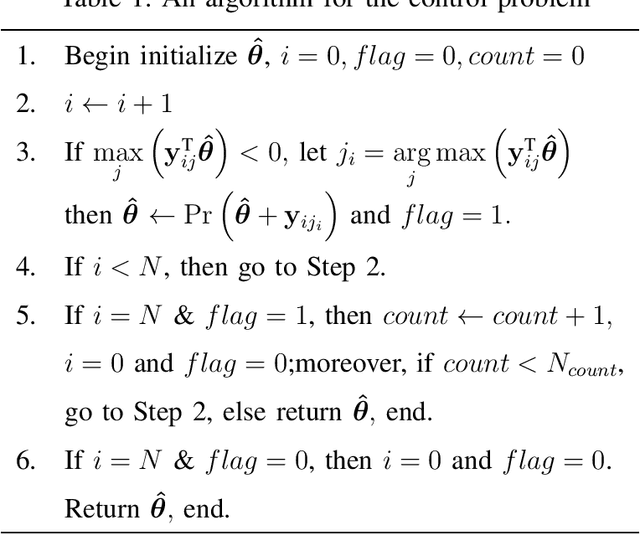
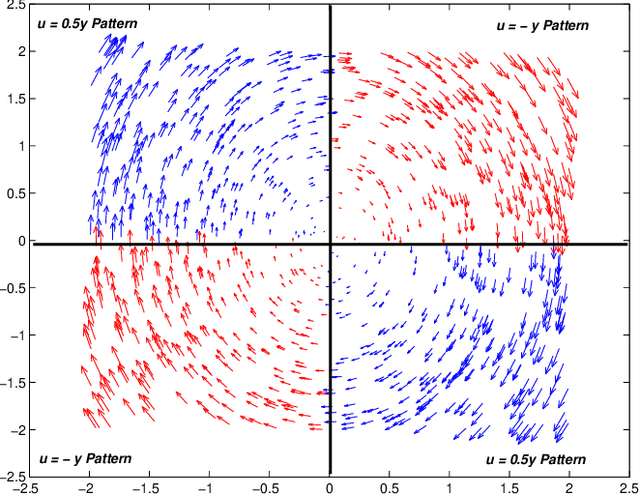
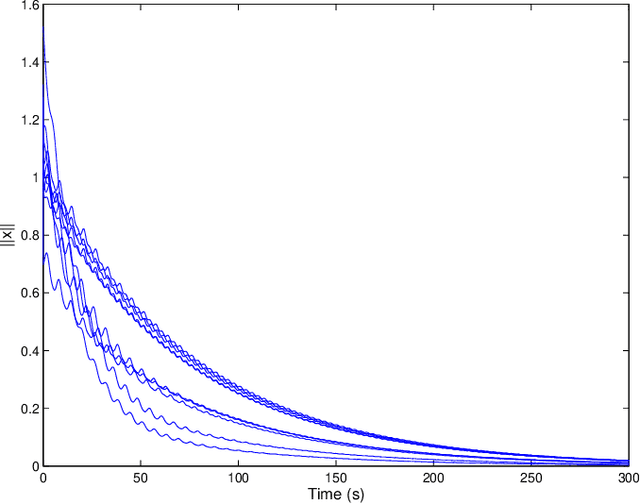
Nowadays, data are richly accessible to accumulate, and the increasingly powerful capability with computing offers reasonable ease of handling big data. This remarkable scenario leads to a new way for solving some control problems which was previously hard to analyze and solve. In this paper, a new type of control methods, namely control with patterns (CWP), is proposed to handle data sets corresponding to nonlinear dynamical systems subject to a discrete control constraint set. For data sets of this kind, a new definition, namely exponential attraction on data sets, is proposed to describe nonlinear dynamical systems under consideration. Based on the data sets and parameterized Lyapunov functions, the problem for exponential attraction on data sets is converted to a pattern classification one. Furthermore, the controller design is proposed accordingly, where the pattern classification function is used to decide which control element in the control set should be employed. Illustrative examples are given to show the effectiveness of the proposed CWP.
Practical Distributed Control for Cooperative Multicopters in Structured Free Flight Concepts
Nov 22, 2021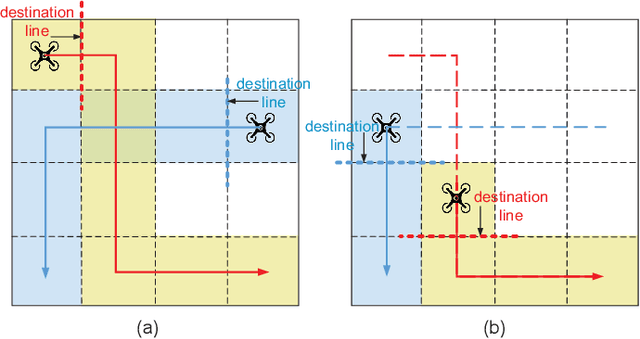
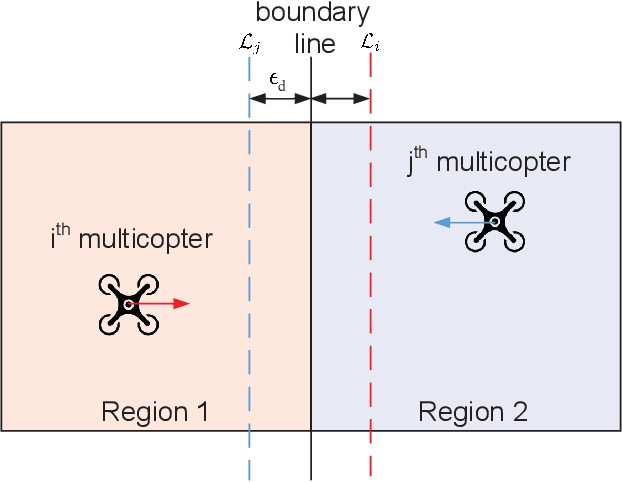
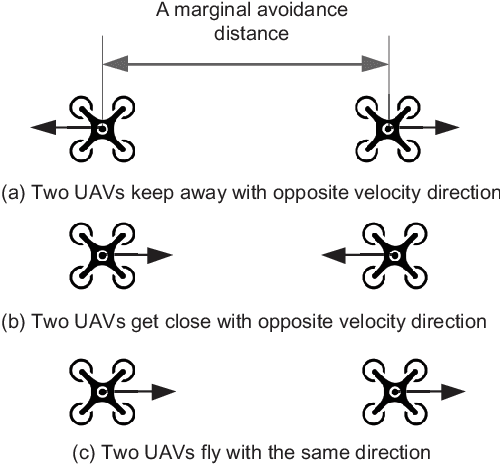
Unmanned Aerial Vehicles (UAVs) are now becoming increasingly accessible to amateur and com-mercial users alike. Several types of airspace structures are proposed in recent research, which include several structured free flight concepts. In this paper, for simplic-ity, distributed coordinating the motions of multicopters in structured airspace concepts is focused. This is formulated as a free flight problem, which includes convergence to destination lines and inter-agent collision avoidance. The destination line of each multicopter is known a priori. Further, Lyapunov-like functions are designed elaborately, and formal analysis and proofs of the proposed distributed control are made to show that the free flight control problem can be solved. What is more, by the proposed controller, a multicopter can keep away from another as soon as possible, once it enters into the safety area of another one. Simulations and experiments are given to show the effectiveness of the proposed method.
Practical Distributed Control for VTOL UAVs to Pass a Tunnel
Jan 19, 2021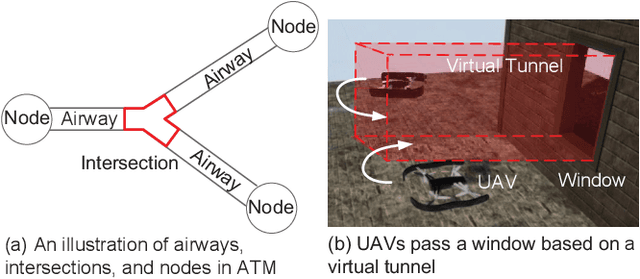
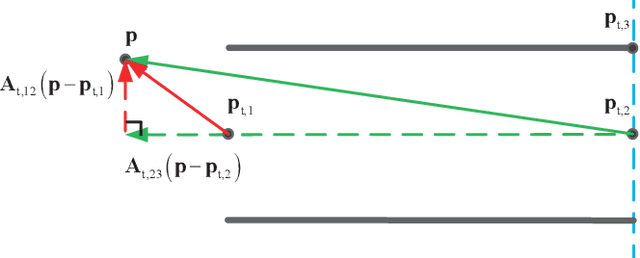
Unmanned Aerial Vehicles (UAVs) are now becoming increasingly accessible to amateur and commercial users alike. An air traffic management (ATM) system is needed to help ensure that this newest entrant into the skies does not collide with others. In an ATM, airspace can be composed of airways, intersections and nodes. In this paper, for simplicity, distributed coordinating the motions of Vertical TakeOff and Landing (VTOL) UAVs to pass an airway is focused. This is formulated as a tunnel passing problem, which includes passing a tunnel, inter-agent collision avoidance and keeping within the tunnel. Lyapunov-like functions are designed elaborately, and formal analysis based on invariant set theorem is made to show that all UAVs can pass the tunnel without getting trapped, avoid collision and keep within the tunnel. What is more, by the proposed distributed control, a VTOL UAV can keep away from another VTOL UAV or return back to the tunnel as soon as possible, once it enters into the safety area of another or has a collision with the tunnel during it is passing the tunnel. Simulations and experiments are carried out to show the effectiveness of the proposed method and the comparison with other methods.
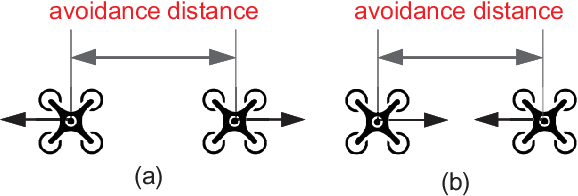
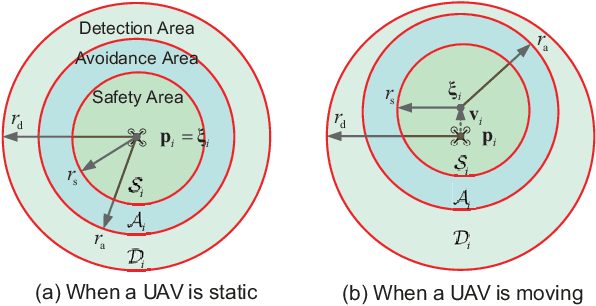
Practical Control for Multicopters to Avoid Non-Cooperative Moving Obstacles
Jan 08, 2021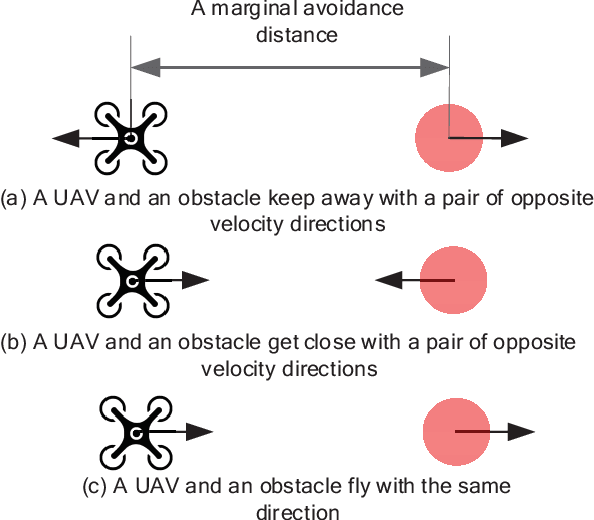
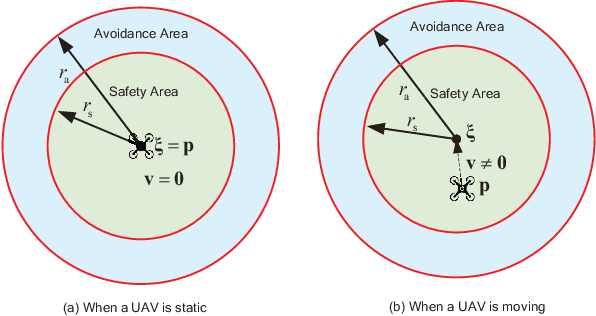
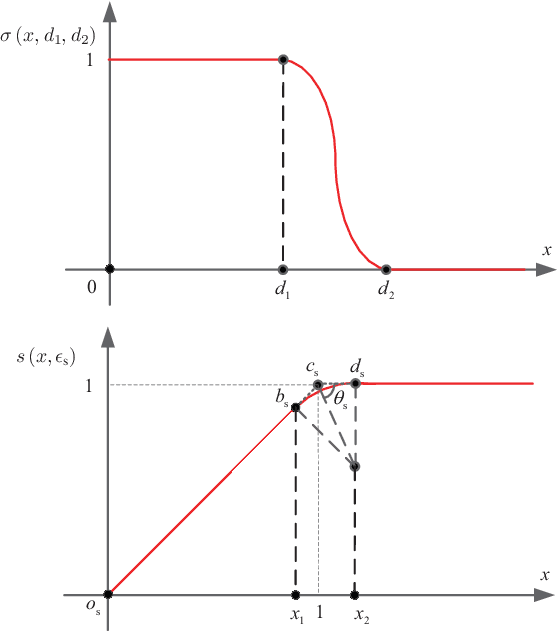
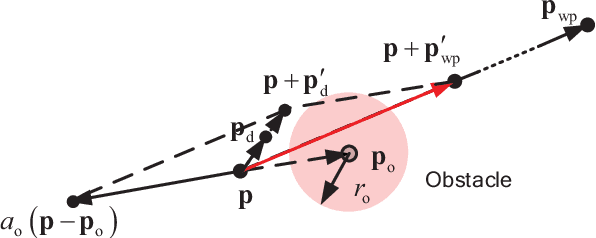
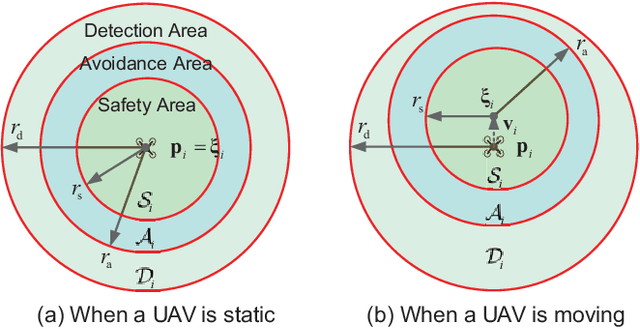
Unmanned Aerial Vehicles (UAVs) are now becoming increasingly accessible to amateur and commercial users alike. The main task for UAVs is to keep a prescribed separation with obstacles in the air. In this paper, a collision-avoidance control method for non-cooperative moving obstacles is proposed for a multicopter with the altitude hold mode by using a Lyapunov-like barrier function. Lyapunov-like functions are designed elaborately, based on which formal analysis and proofs of the proposed control are made to show that the collision-avoidance control problem can be solved if the moving obstacle is slower than the multicopter. The result can be extended to some cases of multiple obstacles. What is more, by the proposed control, a multicopter can keep away from obstacles as soon as possible, once obstacles enter into the safety area of the multicopter accidentally, and converge to the waypoint. Simulations and experiments are given to show the effectiveness of the proposed method by showing the distance between UAV and waypoint, obstacles respectively.
Unified Simulation and Test Platform for Control Systems of Unmanned Vehicles
Aug 07, 2019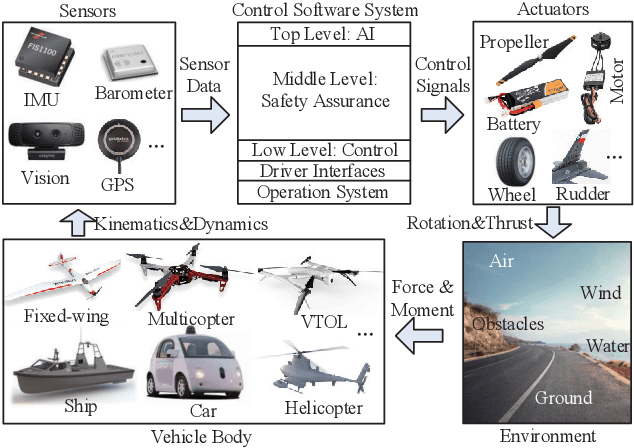
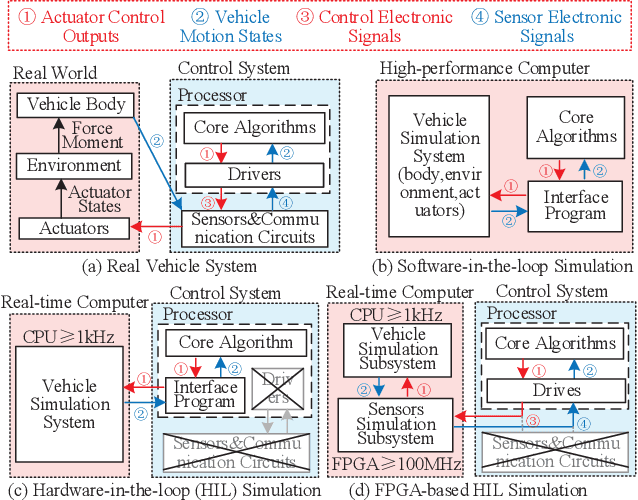
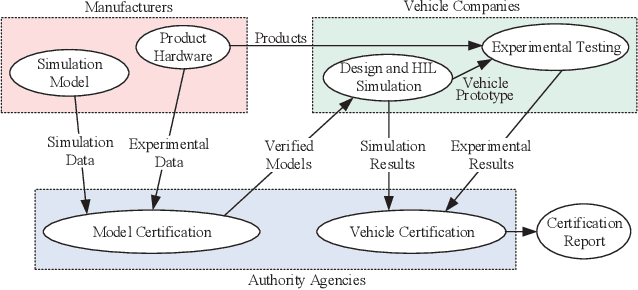
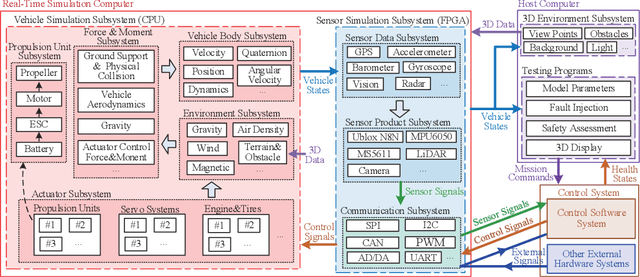
Control systems on unmanned vehicles are safety-critical systems whose requirements on reliability and safety are ever-increasing. Currently, testing a complex autonomous control system is an expensive and time-consuming process, which requires massive repeated experimental testing during the whole development stage. This paper presents a unified simulation and test platform for vehicle autonomous control systems aiming to significantly improve the development speed and safety level of unmanned vehicles. First, a unified modular modeling framework compatible with different types of vehicles is proposed with methods to ensure modeling credibility. Then, the simulation software system is developed by the model-based design framework, whose modular programming methods and automatic code generation functions ensure the efficiency, credibility, and standardization of the system development process. Finally, an FPGA-based real-time hardware-in-the-loop simulation platform is proposed to ensure the comprehensiveness and credibility of the simulation and test results. In the end, the proposed platform is applied to a multicopter control system. By comparing with experimental results, the accuracy and credibility of the simulation testing results are verified by using the simulation credibility assessment method proposed in our previous work. To verify the practicability of the proposed platform, several successful applications are presented for the multicopter rapid prototyping, estimation algorithm verification, autonomous flight testing, and automatic safety testing with automatic fault injection and result evaluation of unmanned vehicles.
An Analytical Design Optimization Method for Electric Propulsion Systems of Multicopter UAVs with Desired Hovering Endurance
Sep 17, 2018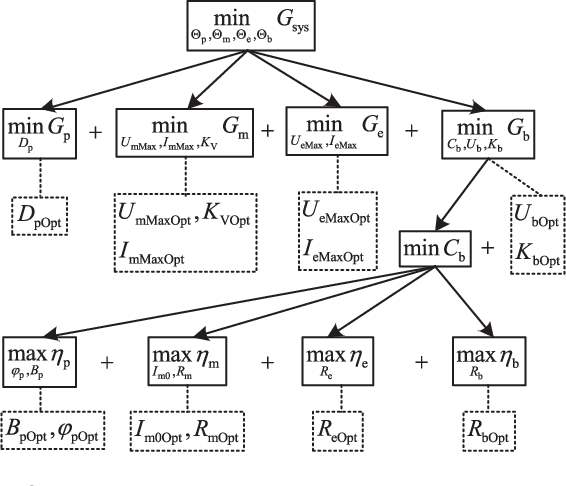
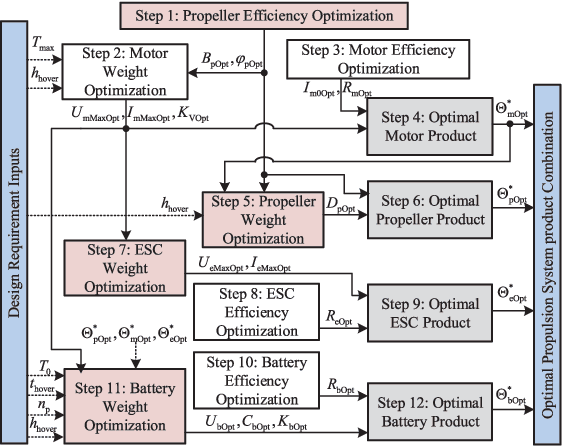
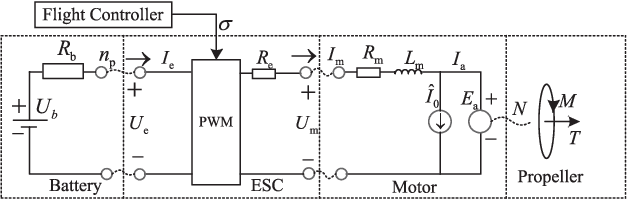
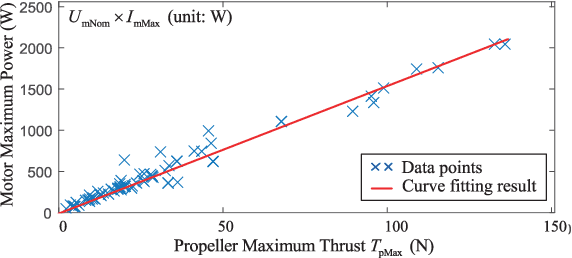
Multicopters are becoming increasingly important in both civil and military fields. Currently, most multicopter propulsion systems are designed by experience and trial-and-error experiments, which are costly and ineffective. This paper proposes a simple and practical method to help designers find the optimal propulsion system according to the given design requirements. First, the modeling methods for four basic components of the propulsion system including propellers, motors, electric speed controls, and batteries are studied respectively. Secondly, the whole optimization design problem is simplified and decoupled into several sub-problems. By solving these sub-problems, the optimal parameters of each component can be obtained respectively. Finally, based on the obtained optimal component parameters, the optimal product of each component can be quickly located and determined from the corresponding database. Experiments and statistical analyses demonstrate the effectiveness of the proposed method.
A Control Performance Index for Multicopters Under Off-nominal Conditions
Nov 16, 2017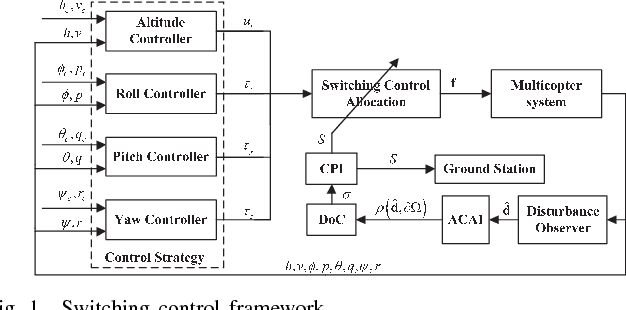
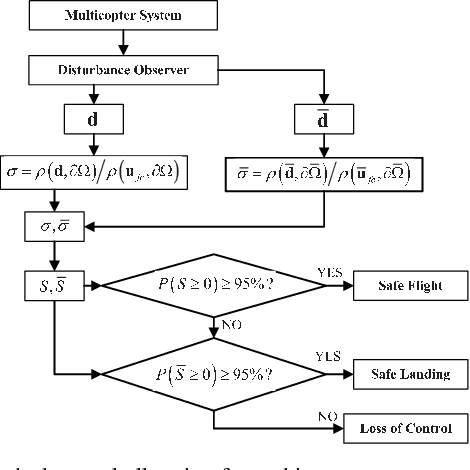
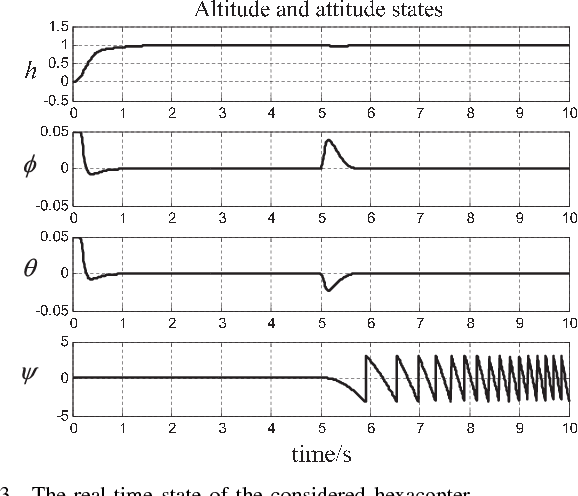
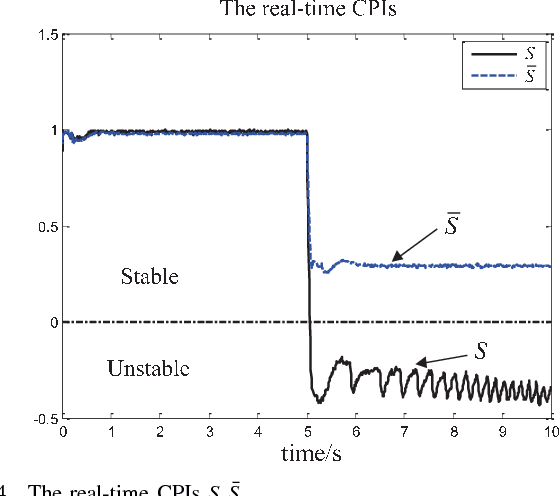
In order to prevent loss of control (LOC) accidents,the real-time control performance monitoring problem is studied for multicopters. Different from the existing work, this paper does not try to monitor the performance of the controllers directly. In turn, the disturbances of multicopters under off-nominal conditions are estimated to affect a proposed index to tell the user whether the multicopter will be LOC or not. Firstly, a new degree of controllability (DoC) will be proposed for multicopters subject to control constrains and off-nominal conditions. Then a control performance index (CPI) is defined based on the new DoC to reflect the control performance for multicopters. Besides, the proposed CPI is applied to a new switching control framework to guide the control decision of multicopter under off-nominal conditions. Finally, simulation and experimental results show the effectiveness of the CPI and the proposed switching control framework.