 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePractical Distributed Control for Cooperative Multicopters in Structured Free Flight Concepts
Nov 22, 2021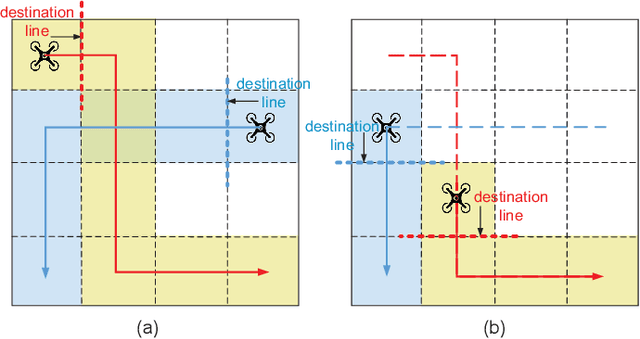
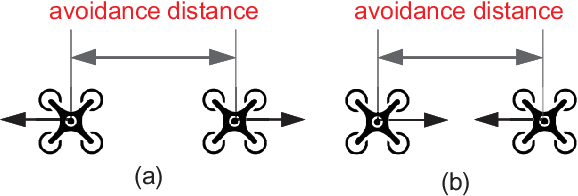
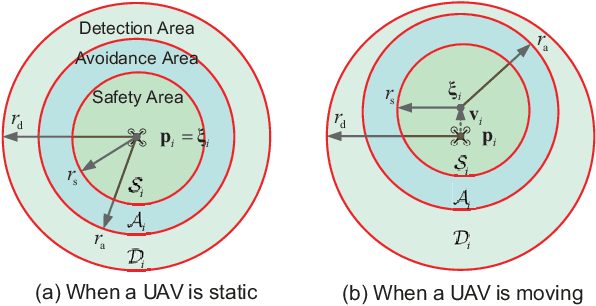
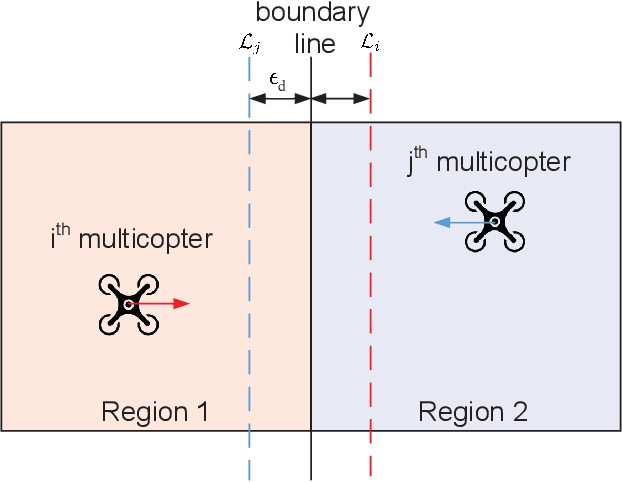
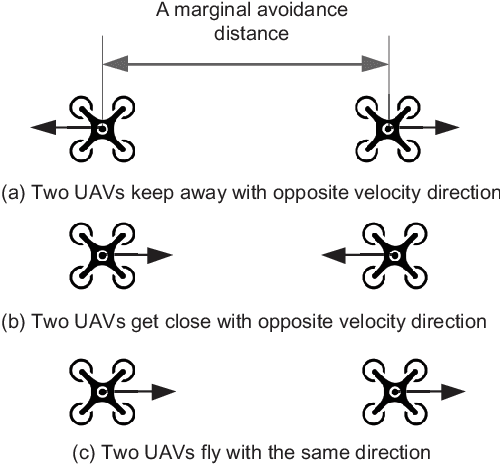
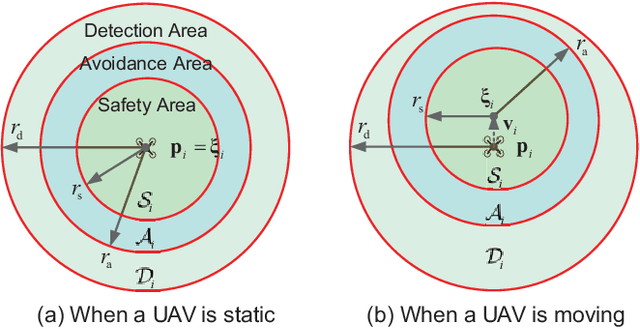
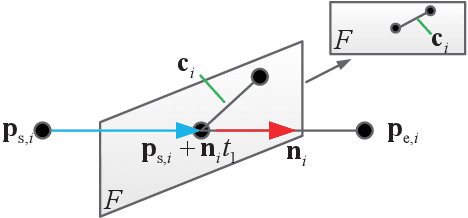
Unmanned Aerial Vehicles (UAVs) are now becoming increasingly accessible to amateur and com-mercial users alike. Several types of airspace structures are proposed in recent research, which include several structured free flight concepts. In this paper, for simplic-ity, distributed coordinating the motions of multicopters in structured airspace concepts is focused. This is formulated as a free flight problem, which includes convergence to destination lines and inter-agent collision avoidance. The destination line of each multicopter is known a priori. Further, Lyapunov-like functions are designed elaborately, and formal analysis and proofs of the proposed distributed control are made to show that the free flight control problem can be solved. What is more, by the proposed controller, a multicopter can keep away from another as soon as possible, once it enters into the safety area of another one. Simulations and experiments are given to show the effectiveness of the proposed method.
Practical Distributed Control for VTOL UAVs to Pass a Tunnel
Jan 19, 2021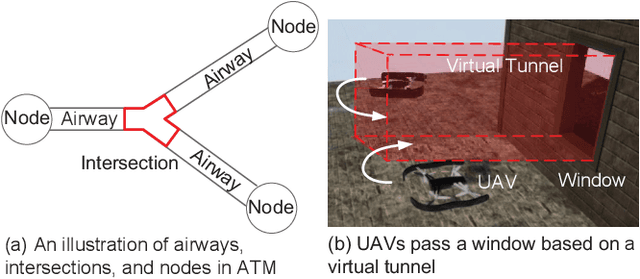
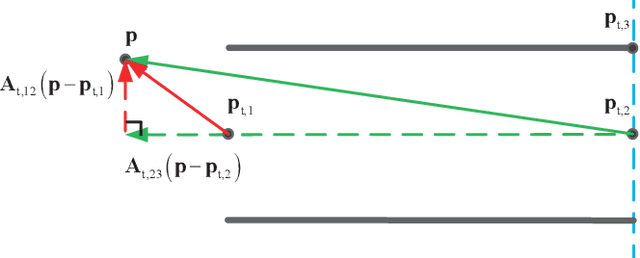
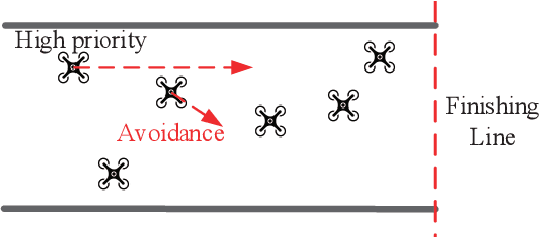
Unmanned Aerial Vehicles (UAVs) are now becoming increasingly accessible to amateur and commercial users alike. An air traffic management (ATM) system is needed to help ensure that this newest entrant into the skies does not collide with others. In an ATM, airspace can be composed of airways, intersections and nodes. In this paper, for simplicity, distributed coordinating the motions of Vertical TakeOff and Landing (VTOL) UAVs to pass an airway is focused. This is formulated as a tunnel passing problem, which includes passing a tunnel, inter-agent collision avoidance and keeping within the tunnel. Lyapunov-like functions are designed elaborately, and formal analysis based on invariant set theorem is made to show that all UAVs can pass the tunnel without getting trapped, avoid collision and keep within the tunnel. What is more, by the proposed distributed control, a VTOL UAV can keep away from another VTOL UAV or return back to the tunnel as soon as possible, once it enters into the safety area of another or has a collision with the tunnel during it is passing the tunnel. Simulations and experiments are carried out to show the effectiveness of the proposed method and the comparison with other methods.
Sky Highway Design for Dense Traffic
Oct 19, 2020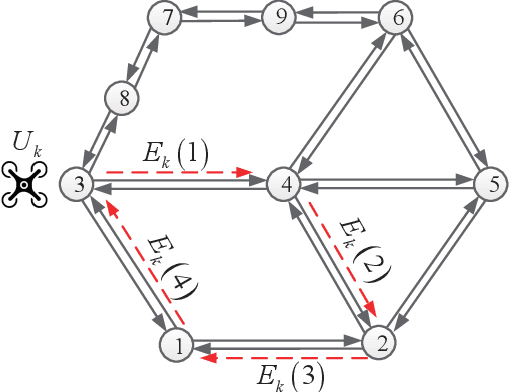
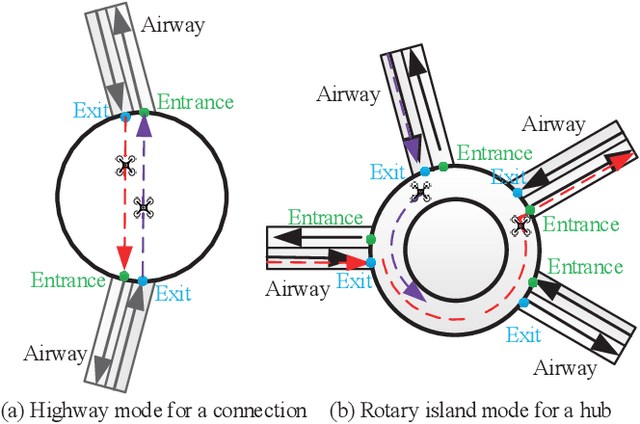
The number of Unmanned Aerial Vehicles (UAVs) continues to explode. Within the total spectrum of Unmanned Aircraft System (UAS) operations, Urban Air Mobility (UAM) is also on the way. Dense air traffic is getting ever closer to us. Current research either focuses on traffic network design and route design for safety purpose or swarm control in open airspace to contain large volume of UAVs. In order to achieve a tradeoff between safety and volumes of UAVs, a sky highway with its basic operation for Vertical Take-Off and Landing (VTOL) UAV is proposed, where traffic network, route and swarm control design are all considered. In the sky highway, each UAV will have its route, and an airway like a highway road can allow many UAVs to perform free flight. The geometrical structure of the proposed sky highway with corresponding flight modes to support dense traffic is studied one by one. The effectiveness of the proposed sky highway is shown by the given demonstration.
An Improved Neural Segmentation Method Based on U-NET
Aug 16, 2017Neural segmentation has a great impact on the smooth implementation of local anesthesia surgery. At present, the network for the segmentation includes U-NET [1] and SegNet [2]. U-NET network has short training time and less training parameters, but the depth is not deep enough. SegNet network has deeper structure, but it needs longer training time, and more training samples. In this paper, we propose an improved U-NET neural network for the segmentation. This network deepens the original structure through importing residual network. Compared with U-NET and SegNet, the improved U-NET network has fewer training parameters, shorter training time and get a great improvement in segmentation effect. The improved U-NET network structure has a good application scene in neural segmentation.