 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Control Performance Index for Multicopters Under Off-nominal Conditions
Nov 16, 2017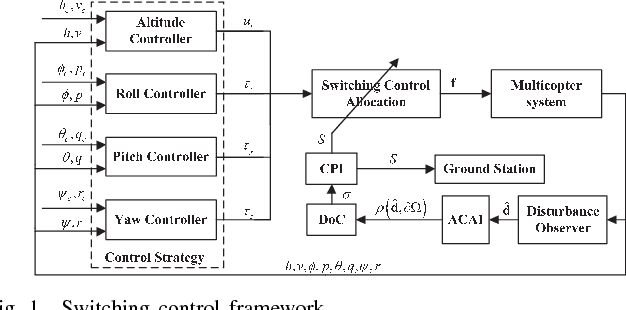
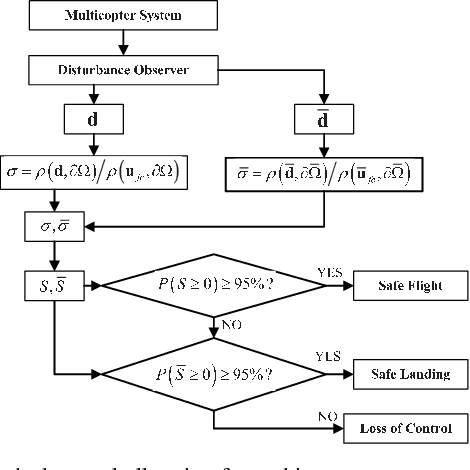
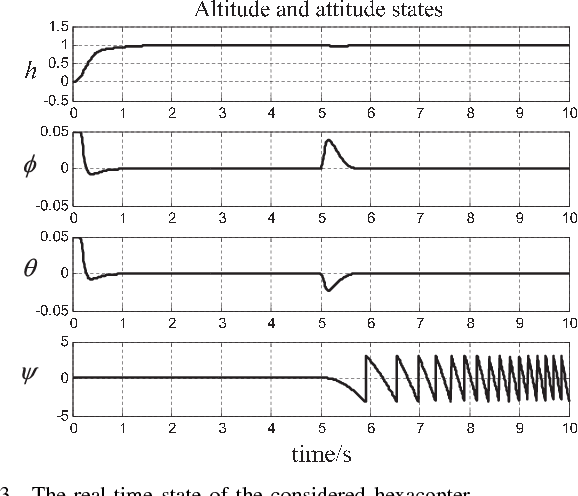
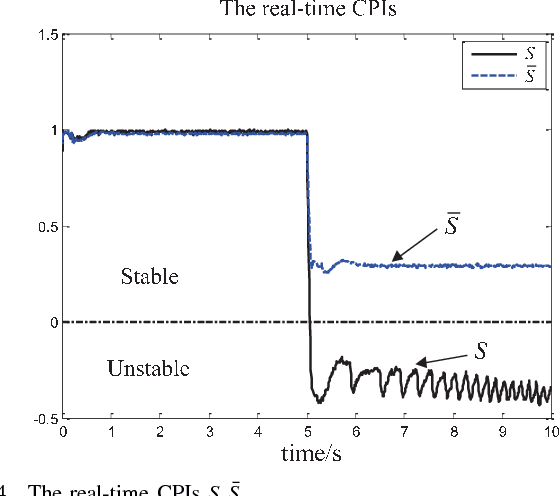
In order to prevent loss of control (LOC) accidents,the real-time control performance monitoring problem is studied for multicopters. Different from the existing work, this paper does not try to monitor the performance of the controllers directly. In turn, the disturbances of multicopters under off-nominal conditions are estimated to affect a proposed index to tell the user whether the multicopter will be LOC or not. Firstly, a new degree of controllability (DoC) will be proposed for multicopters subject to control constrains and off-nominal conditions. Then a control performance index (CPI) is defined based on the new DoC to reflect the control performance for multicopters. Besides, the proposed CPI is applied to a new switching control framework to guide the control decision of multicopter under off-nominal conditions. Finally, simulation and experimental results show the effectiveness of the CPI and the proposed switching control framework.
Controllability Analysis for Multirotor Helicopter Rotor Degradation and Failure
Feb 04, 2015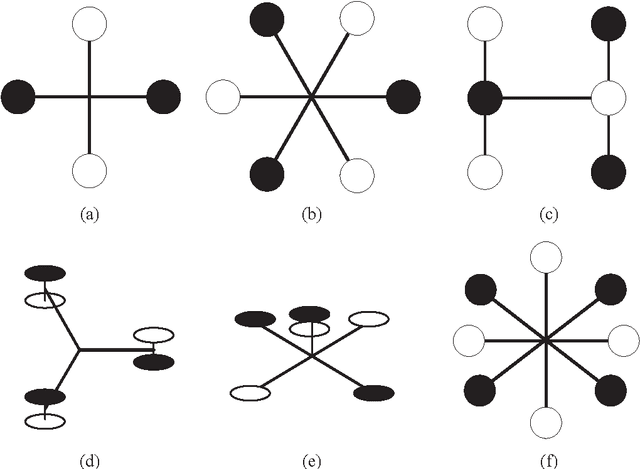
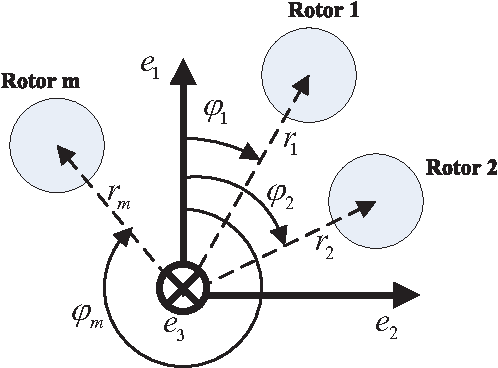

This paper considers the controllability analysis problem for a class of multirotor systems subject to rotor failure/wear. It is shown that classical controllability theories of linear systems are not sufficient to test the controllability of the considered multirotors. Owing to this, an easy-to-use measurement index is introduced to assess the available control authority. Based on it, a new necessary and sufficient condition for the controllability of multirotors is derived. Furthermore, a controllability test procedure is approached. The proposed controllability test method is applied to a class of hexacopters with different rotor configurations and different rotor efficiency parameters to show its effectiveness. The analysis results show that hexacopters with different rotor configurations have different fault-tolerant capabilities. It is therefore necessary to test the controllability of the multirotors before any fault-tolerant control strategies are employed.
* 21 pages, 4 figures
Controllability Analysis and Degraded Control for a Class of Hexacopters Subject to Rotor Failures
Mar 02, 2014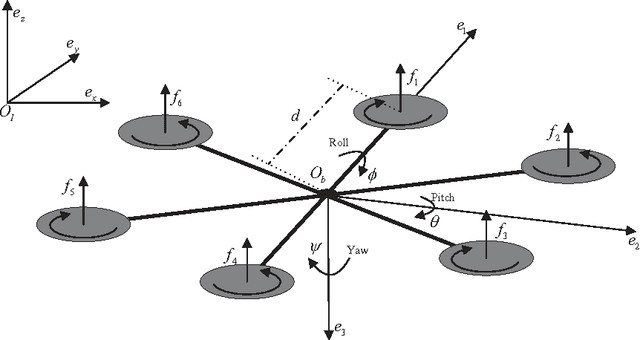
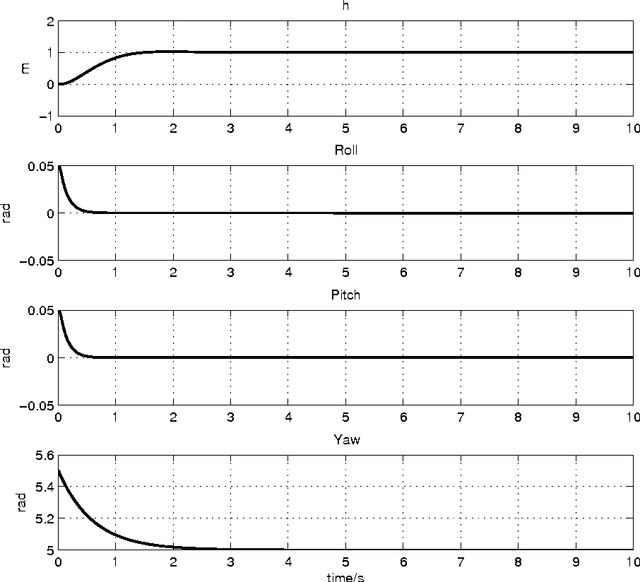

This paper considers the controllability analysis and fault tolerant control problem for a class of hexacopters. It is shown that the considered hexacopter is uncontrollable when one rotor fails, even though the hexacopter is over-actuated and its controllability matrix is row full rank. According to this, a fault tolerant control strategy is proposed to control a degraded system, where the yaw states of the considered hexacopter are ignored. Theoretical analysis indicates that the degraded system is controllable if and only if the maximum lift of each rotor is greater than a certain value. The simulation and experiment results on a prototype hexacopter show the feasibility of our controllability analysis and degraded control strategy.
* 21 pages, 7 figures, submitted to Journal of Intelligent & Robotic Systems