Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeControllability Analysis and Degraded Control for a Class of Hexacopters Subject to Rotor Failures
Paper and Code
Mar 02, 2014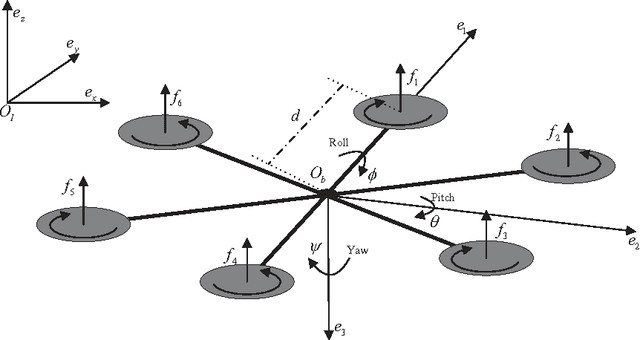
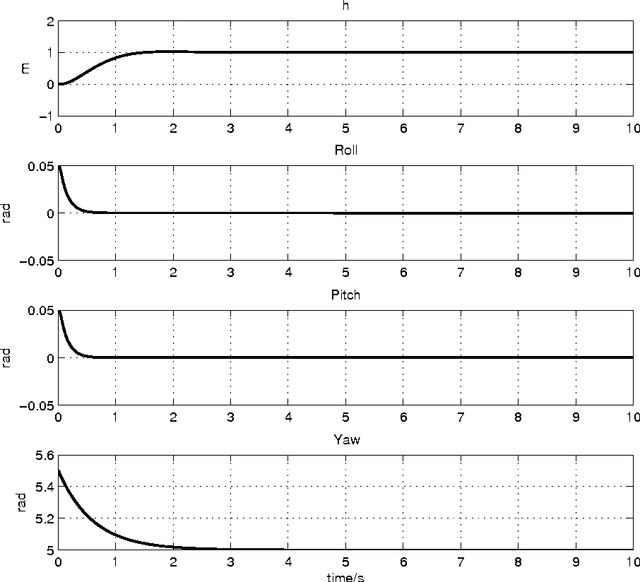

This paper considers the controllability analysis and fault tolerant control problem for a class of hexacopters. It is shown that the considered hexacopter is uncontrollable when one rotor fails, even though the hexacopter is over-actuated and its controllability matrix is row full rank. According to this, a fault tolerant control strategy is proposed to control a degraded system, where the yaw states of the considered hexacopter are ignored. Theoretical analysis indicates that the degraded system is controllable if and only if the maximum lift of each rotor is greater than a certain value. The simulation and experiment results on a prototype hexacopter show the feasibility of our controllability analysis and degraded control strategy.
* Journal of Intelligent & Robotic Systems, 2015, 78(1): 143-157 * 21 pages, 7 figures, submitted to Journal of Intelligent & Robotic
Systems
View paper on