 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Control Performance Index for Multicopters Under Off-nominal Conditions
Nov 16, 2017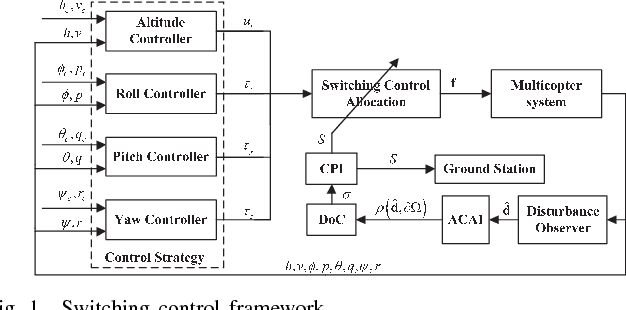
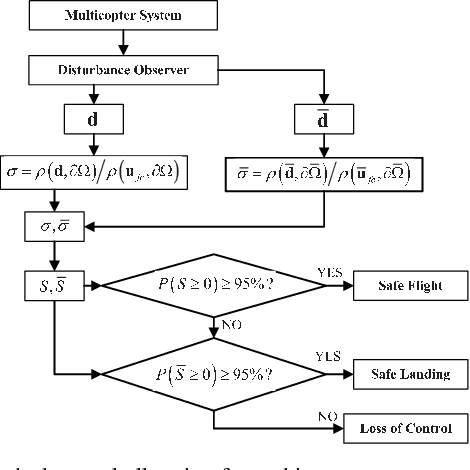
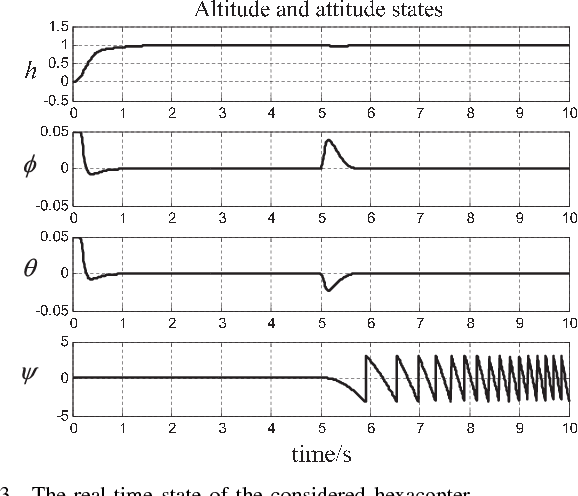
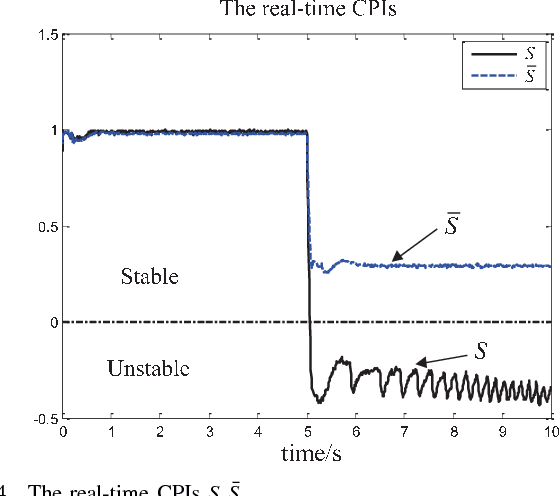
In order to prevent loss of control (LOC) accidents,the real-time control performance monitoring problem is studied for multicopters. Different from the existing work, this paper does not try to monitor the performance of the controllers directly. In turn, the disturbances of multicopters under off-nominal conditions are estimated to affect a proposed index to tell the user whether the multicopter will be LOC or not. Firstly, a new degree of controllability (DoC) will be proposed for multicopters subject to control constrains and off-nominal conditions. Then a control performance index (CPI) is defined based on the new DoC to reflect the control performance for multicopters. Besides, the proposed CPI is applied to a new switching control framework to guide the control decision of multicopter under off-nominal conditions. Finally, simulation and experimental results show the effectiveness of the CPI and the proposed switching control framework.