 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUniform Passive Fault-Tolerant Control of a Quadcopter with One, Two, or Three Rotor Failure
Nov 23, 2022



This study proposes a uniform passive fault-tolerant control (FTC) method for a quadcopter that does not rely on fault information subject to one, two adjacent, two opposite, or three rotors failure. The uniform control implies that the passive FTC is able to cover the condition from quadcopter fault-free to rotor failure without controller switching. To achieve the purpose of the passive FTC, the rotors' fault is modeled as a disturbance acting on the virtual control of the quadcopter system. The disturbance estimate is used directly for the passive FTC with rotor failure. To avoid controller switching between normal control and FTC, a dynamic control allocation is used. In addition, the closed-loop stability has been analyzed and a virtual control feedback is adopted to achieve the passive FTC for the quadcopter with two and three rotor failure. To validate the proposed uniform passive FTC method, outdoor experiments are performed for the first time, which have demonstrated that the hovering quadcopter is able to recover from one rotor failure by the proposed controller and continue to fly even if two adjacent, two opposite, or three rotors fail, without any rotor fault information and controller switching.
Unified Simulation and Test Platform for Control Systems of Unmanned Vehicles
Aug 07, 2019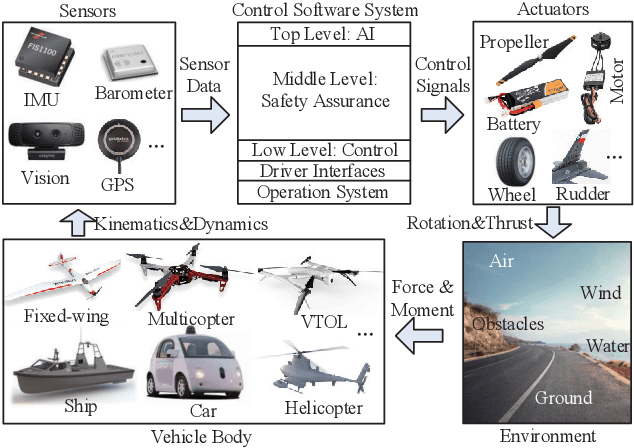
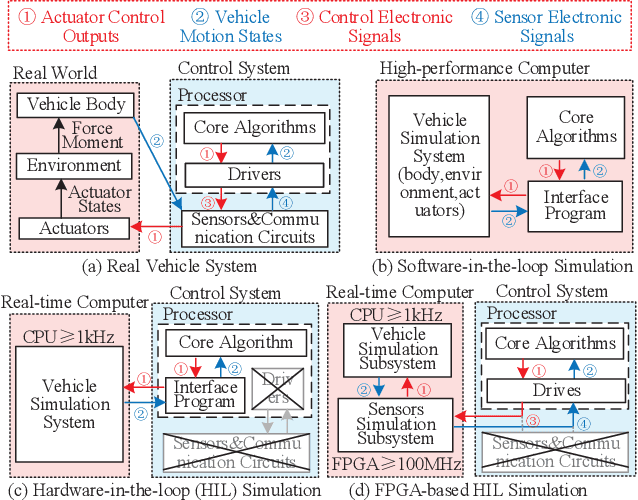
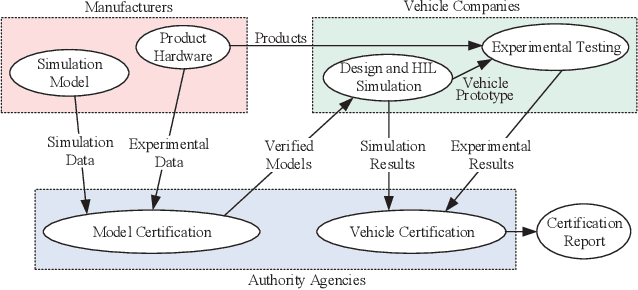
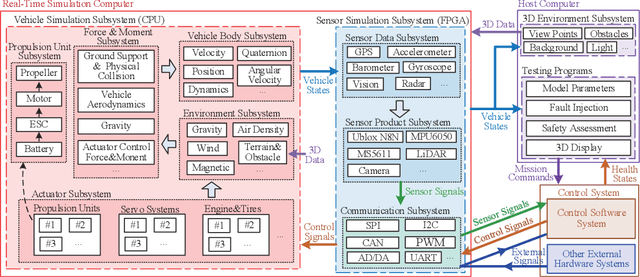
Control systems on unmanned vehicles are safety-critical systems whose requirements on reliability and safety are ever-increasing. Currently, testing a complex autonomous control system is an expensive and time-consuming process, which requires massive repeated experimental testing during the whole development stage. This paper presents a unified simulation and test platform for vehicle autonomous control systems aiming to significantly improve the development speed and safety level of unmanned vehicles. First, a unified modular modeling framework compatible with different types of vehicles is proposed with methods to ensure modeling credibility. Then, the simulation software system is developed by the model-based design framework, whose modular programming methods and automatic code generation functions ensure the efficiency, credibility, and standardization of the system development process. Finally, an FPGA-based real-time hardware-in-the-loop simulation platform is proposed to ensure the comprehensiveness and credibility of the simulation and test results. In the end, the proposed platform is applied to a multicopter control system. By comparing with experimental results, the accuracy and credibility of the simulation testing results are verified by using the simulation credibility assessment method proposed in our previous work. To verify the practicability of the proposed platform, several successful applications are presented for the multicopter rapid prototyping, estimation algorithm verification, autonomous flight testing, and automatic safety testing with automatic fault injection and result evaluation of unmanned vehicles.