 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRflyMAD: A Dataset for Multicopter Fault Detection and Health Assessment
Nov 19, 2023



This paper presents an open-source dataset RflyMAD, a Multicopter Abnomal Dataset developed by Reliable Flight Control (Rfly) Group aiming to promote the development of research fields like fault detection and isolation (FDI) or health assessment (HA). The entire 114 GB dataset includes 11 types of faults under 6 flight statuses which are adapted from ADS-33 file to cover more occasions in which the multicopters have different mobility levels when faults occur. In the total 5629 flight cases, the fault time is up to 3283 minutes, and there are 2566 cases for software-in-the-loop (SIL) simulation, 2566 cases for hardware-in-the-loop (HIL) simulation and 497 cases for real flight. As it contains simulation data based on RflySim and real flight data, it is possible to improve the quantity while increasing the data quality. In each case, there are ULog, Telemetry log, Flight information and processed files for researchers to use and check. The RflyMAD dataset could be used as a benchmark for fault diagnosis methods and the support relationship between simulation data and real flight is verified through transfer learning methods. More methods as a baseline will be presented in the future, and RflyMAD will be updated with more data and types. In addition, the dataset and related toolkit can be accessed through https://rfly-openha.github.io/documents/4_resources/dataset.html.
Unified Simulation and Test Platform for Control Systems of Unmanned Vehicles
Aug 07, 2019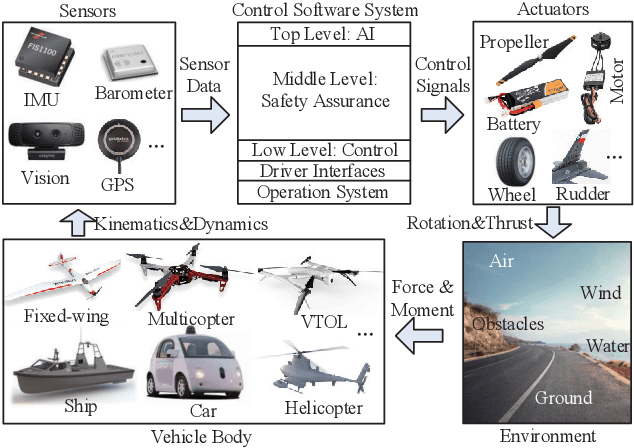
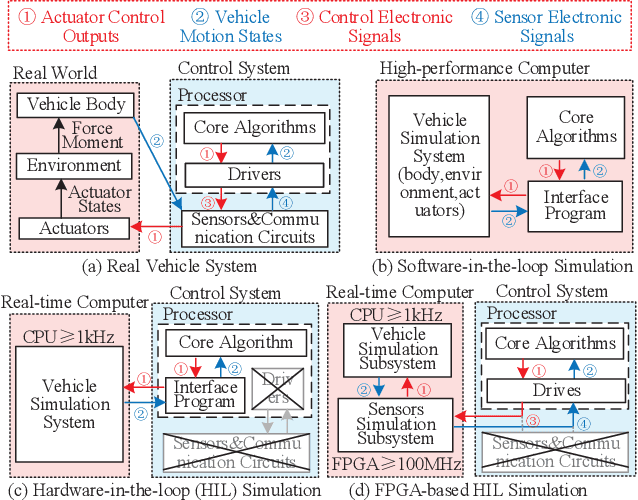
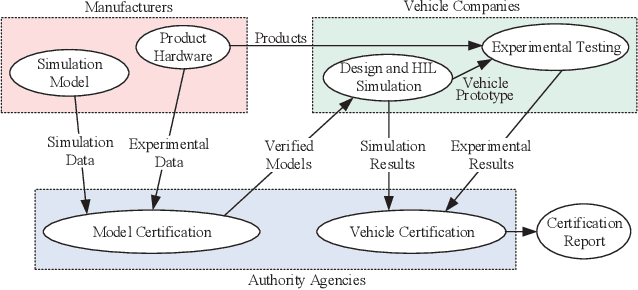
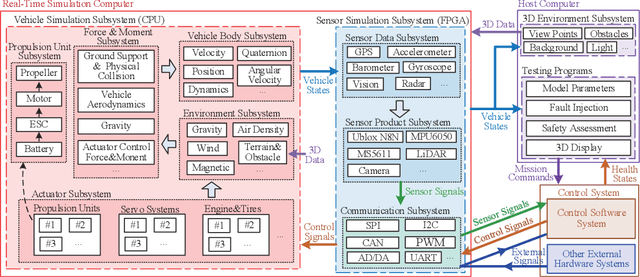
Control systems on unmanned vehicles are safety-critical systems whose requirements on reliability and safety are ever-increasing. Currently, testing a complex autonomous control system is an expensive and time-consuming process, which requires massive repeated experimental testing during the whole development stage. This paper presents a unified simulation and test platform for vehicle autonomous control systems aiming to significantly improve the development speed and safety level of unmanned vehicles. First, a unified modular modeling framework compatible with different types of vehicles is proposed with methods to ensure modeling credibility. Then, the simulation software system is developed by the model-based design framework, whose modular programming methods and automatic code generation functions ensure the efficiency, credibility, and standardization of the system development process. Finally, an FPGA-based real-time hardware-in-the-loop simulation platform is proposed to ensure the comprehensiveness and credibility of the simulation and test results. In the end, the proposed platform is applied to a multicopter control system. By comparing with experimental results, the accuracy and credibility of the simulation testing results are verified by using the simulation credibility assessment method proposed in our previous work. To verify the practicability of the proposed platform, several successful applications are presented for the multicopter rapid prototyping, estimation algorithm verification, autonomous flight testing, and automatic safety testing with automatic fault injection and result evaluation of unmanned vehicles.
An Analytical Design Optimization Method for Electric Propulsion Systems of Multicopter UAVs with Desired Hovering Endurance
Sep 17, 2018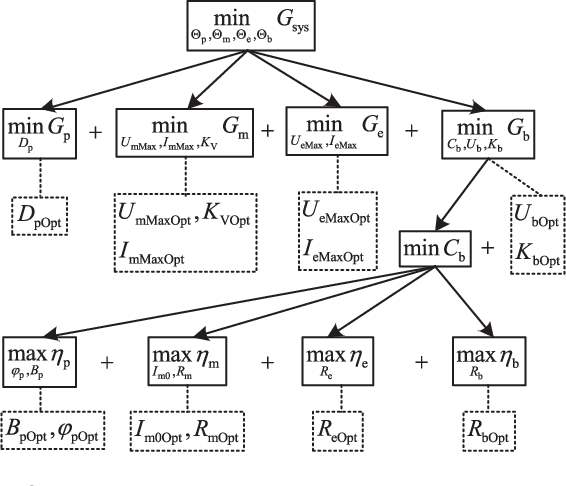
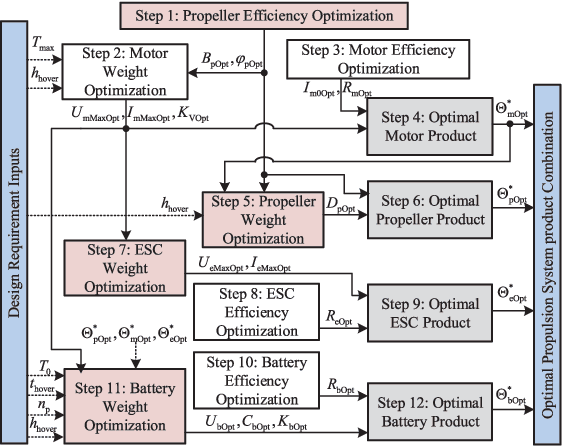
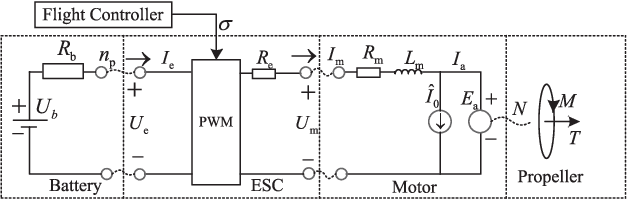
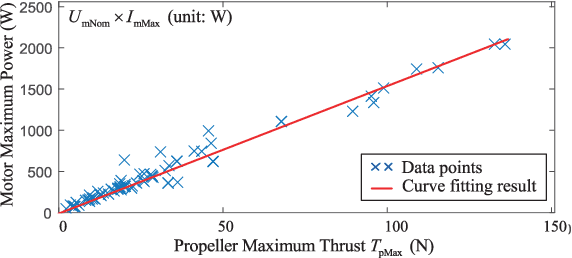
Multicopters are becoming increasingly important in both civil and military fields. Currently, most multicopter propulsion systems are designed by experience and trial-and-error experiments, which are costly and ineffective. This paper proposes a simple and practical method to help designers find the optimal propulsion system according to the given design requirements. First, the modeling methods for four basic components of the propulsion system including propellers, motors, electric speed controls, and batteries are studied respectively. Secondly, the whole optimization design problem is simplified and decoupled into several sub-problems. By solving these sub-problems, the optimal parameters of each component can be obtained respectively. Finally, based on the obtained optimal component parameters, the optimal product of each component can be quickly located and determined from the corresponding database. Experiments and statistical analyses demonstrate the effectiveness of the proposed method.