 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Image Based Visual Servo Method for Probe-and-Drogue Autonomous Aerial Refueling
May 27, 2023With the high focus on autonomous aerial refueling recently, it becomes increasingly urgent to design efficient methods or algorithms to solve AAR problems in complicated aerial environments. Apart from the complex aerodynamic disturbance, another problem is the pose estimation error caused by the camera calibration error, installation error, or 3D object modeling error, which may not satisfy the highly accurate docking. The main objective of the effort described in this paper is the implementation of an image-based visual servo control method, which contains the establishment of an image-based visual servo model involving the receiver's dynamics and the design of the corresponding controller. Simulation results indicate that the proposed method can make the system dock successfully under complicated conditions and improve the robustness against pose estimation error.
An Analytical Design Optimization Method for Electric Propulsion Systems of Multicopter UAVs with Desired Hovering Endurance
Sep 17, 2018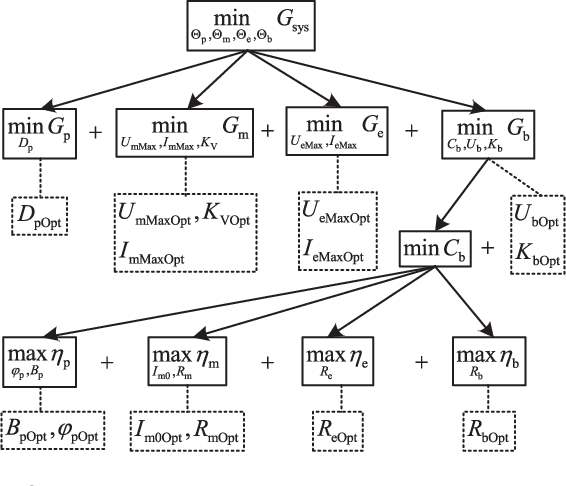
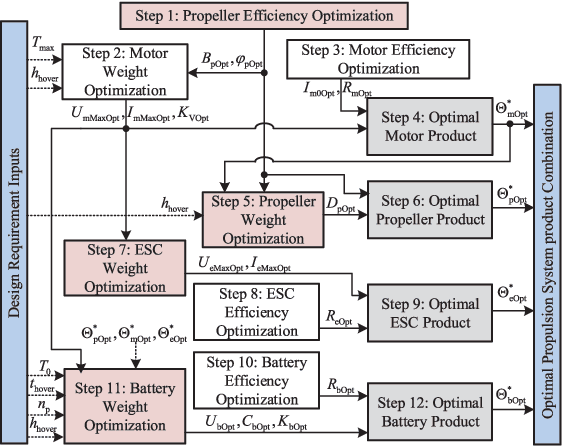
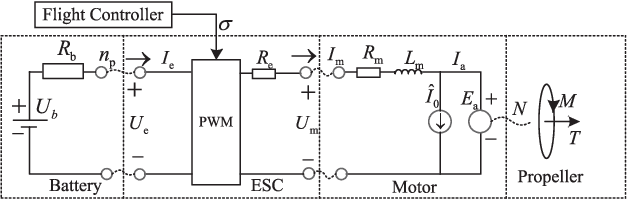
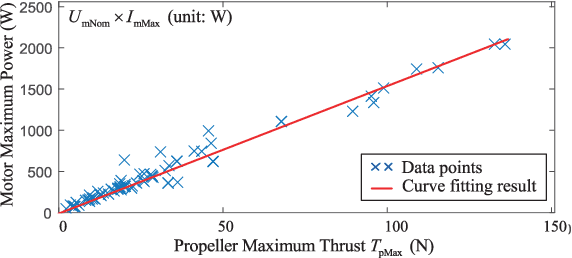
Multicopters are becoming increasingly important in both civil and military fields. Currently, most multicopter propulsion systems are designed by experience and trial-and-error experiments, which are costly and ineffective. This paper proposes a simple and practical method to help designers find the optimal propulsion system according to the given design requirements. First, the modeling methods for four basic components of the propulsion system including propellers, motors, electric speed controls, and batteries are studied respectively. Secondly, the whole optimization design problem is simplified and decoupled into several sub-problems. By solving these sub-problems, the optimal parameters of each component can be obtained respectively. Finally, based on the obtained optimal component parameters, the optimal product of each component can be quickly located and determined from the corresponding database. Experiments and statistical analyses demonstrate the effectiveness of the proposed method.