 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMOSE: Monocular Semantic Reconstruction Using NeRF-Lifted Noisy Priors
Sep 21, 2024



Accurately reconstructing dense and semantically annotated 3D meshes from monocular images remains a challenging task due to the lack of geometry guidance and imperfect view-dependent 2D priors. Though we have witnessed recent advancements in implicit neural scene representations enabling precise 2D rendering simply from multi-view images, there have been few works addressing 3D scene understanding with monocular priors alone. In this paper, we propose MOSE, a neural field semantic reconstruction approach to lift inferred image-level noisy priors to 3D, producing accurate semantics and geometry in both 3D and 2D space. The key motivation for our method is to leverage generic class-agnostic segment masks as guidance to promote local consistency of rendered semantics during training. With the help of semantics, we further apply a smoothness regularization to texture-less regions for better geometric quality, thus achieving mutual benefits of geometry and semantics. Experiments on the ScanNet dataset show that our MOSE outperforms relevant baselines across all metrics on tasks of 3D semantic segmentation, 2D semantic segmentation and 3D surface reconstruction.
Fast Sparse PCA via Positive Semidefinite Projection for Unsupervised Feature Selection
Sep 12, 2023In the field of unsupervised feature selection, sparse principal component analysis (SPCA) methods have attracted more and more attention recently. Compared to spectral-based methods, SPCA methods don't rely on the construction of a similarity matrix and show better feature selection ability on real-world data. The original SPCA formulates a nonconvex optimization problem. Existing convex SPCA methods reformulate SPCA as a convex model by regarding the reconstruction matrix as an optimization variable. However, they are lack of constraints equivalent to the orthogonality restriction in SPCA, leading to larger solution space. In this paper, it's proved that the optimal solution to a convex SPCA model falls onto the Positive Semidefinite (PSD) cone. A standard convex SPCA-based model with PSD constraint for unsupervised feature selection is proposed. Further, a two-step fast optimization algorithm via PSD projection is presented to solve the proposed model. Two other existing convex SPCA-based models are also proven to have their solutions optimized on the PSD cone in this paper. Therefore, the PSD versions of these two models are proposed to accelerate their convergence as well. We also provide a regularization parameter setting strategy for our proposed method. Experiments on synthetic and real-world datasets demonstrate the effectiveness and efficiency of the proposed methods.
ROFusion: Efficient Object Detection using Hybrid Point-wise Radar-Optical Fusion
Jul 17, 2023



Radars, due to their robustness to adverse weather conditions and ability to measure object motions, have served in autonomous driving and intelligent agents for years. However, Radar-based perception suffers from its unintuitive sensing data, which lack of semantic and structural information of scenes. To tackle this problem, camera and Radar sensor fusion has been investigated as a trending strategy with low cost, high reliability and strong maintenance. While most recent works explore how to explore Radar point clouds and images, rich contextual information within Radar observation are discarded. In this paper, we propose a hybrid point-wise Radar-Optical fusion approach for object detection in autonomous driving scenarios. The framework benefits from dense contextual information from both the range-doppler spectrum and images which are integrated to learn a multi-modal feature representation. Furthermore, we propose a novel local coordinate formulation, tackling the object detection task in an object-centric coordinate. Extensive results show that with the information gained from optical images, we could achieve leading performance in object detection (97.69\% recall) compared to recent state-of-the-art methods FFT-RadNet (82.86\% recall). Ablation studies verify the key design choices and practicability of our approach given machine generated imperfect detections. The code will be available at https://github.com/LiuLiu-55/ROFusion.
A classification performance evaluation measure considering data separability
Nov 10, 2022Machine learning and deep learning classification models are data-driven, and the model and the data jointly determine their classification performance. It is biased to evaluate the model's performance only based on the classifier accuracy while ignoring the data separability. Sometimes, the model exhibits excellent accuracy, which might be attributed to its testing on highly separable data. Most of the current studies on data separability measures are defined based on the distance between sample points, but this has been demonstrated to fail in several circumstances. In this paper, we propose a new separability measure--the rate of separability (RS), which is based on the data coding rate. We validate its effectiveness as a supplement to the separability measure by comparing it to four other distance-based measures on synthetic datasets. Then, we demonstrate the positive correlation between the proposed measure and recognition accuracy in a multi-task scenario constructed from a real dataset. Finally, we discuss the methods for evaluating the classification performance of machine learning and deep learning models considering data separability.
Ambiguity Function Shaping based on Alternating Direction Riemannian Optimal Algorithm
Sep 08, 2022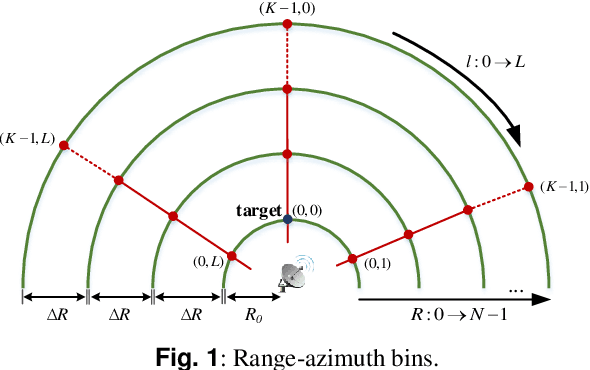
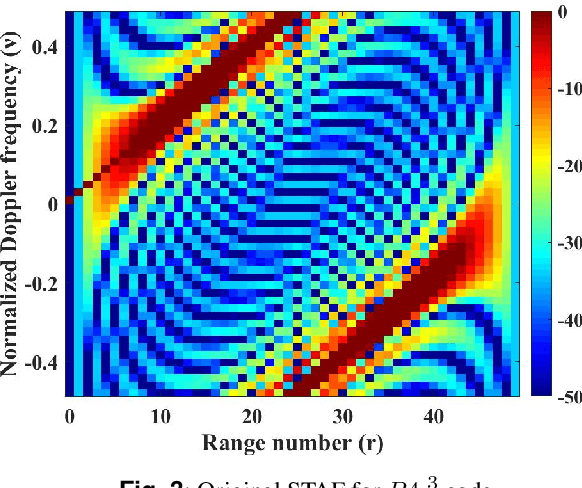
In order to improve the ability of cognitive radar (CR) to adapt to the environment, the required ambiguity function (AF) can be synthesized by designing the waveform. The key to this problem is how to minimize the interference power. Suppressing the interference power is equivalent to minimize the expectation of slow-time ambiguity function (STAF) over range-Doppler bins. From a technical point of view, this is actually an optimization problem of a non-convex quartic function with constant modulus constraints (CMC). In this paper, we proposed a novel method to design a waveform to synthesize the STAF based on suppressing the interference power. We put forward an iterative algorithm within an alternating direction penalty method (ADPM) framework. In each iteration, this problem is split into two sub-problems by introducing auxiliary variables. In the first sub-problem, we solved the convex problem directly with a closed-form solution, then utilized the Riemannian trust region (RTR) algorithm in the second sub-problem. Simulation results demonstrate that the proposed algorithm outperforms other advanced algorithms in the aspects of STAF, range-cut and signal-to-interference-ratio (SIR) value.