 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving Human-Robot Collaboration via Computational Design
Mar 20, 2023When robots entered our day-to-day life, the shared space surrounding humans and robots is critical for effective Human-Robot collaboration. The design of shared space should satisfy humans' preferences and robots' efficiency. This work uses kitchen design as an example to illustrate the importance of good space design in facilitating such collaboration. Given the kitchen boundary, counters, and recipes, the proposed method computes the optimal placement of counters that meet the requirement of kitchen design rules and improve Human-Robot collaboration. The key technical challenge is that the optimization method usually evaluates thousands of designs and the computational cost of motion planning, which is part of the evaluation function, is expensive. We use a decentralized motion planner that can solve multi-agent motion planning efficiently. Our results indicate that optimized kitchen designs can provide noticeable performance improvement to Human-Robot collaboration.
Origami-based Zygote structure enables pluripotent shape-transforming deployable structure
Aug 08, 2022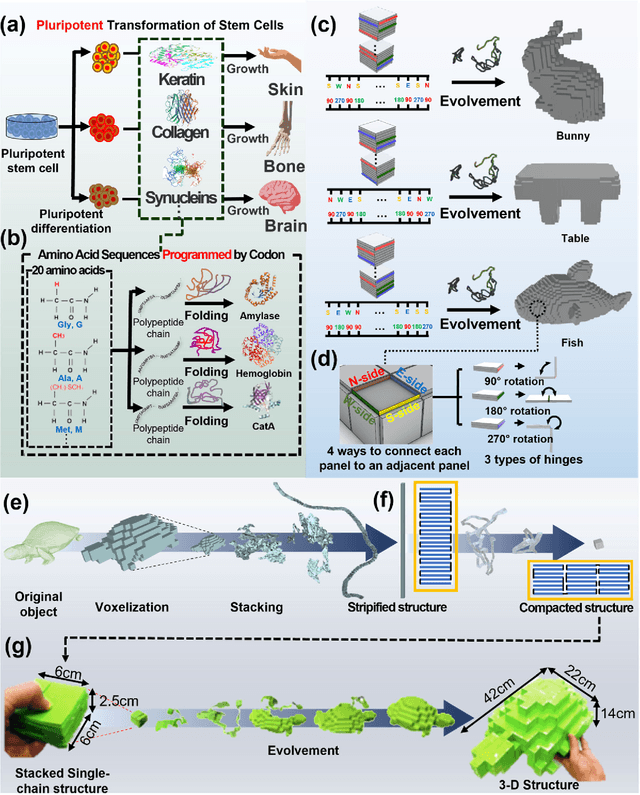


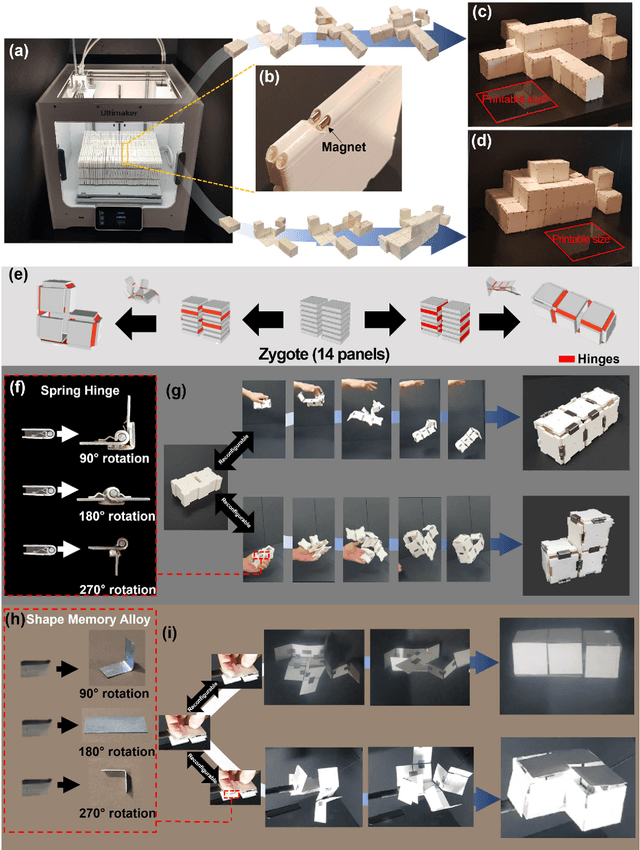
We propose an algorithmic framework of a pluripotent structure evolving from a simple compact structure into diverse complex 3-D structures for designing the shape transformable, reconfigurable, and deployable structures and robots. Our algorithmic approach suggests a way of transforming a compact structure consisting of uniform building blocks into a large, desired 3-D shape. Analogous to the pluripotent stem cells that can grow into a preprogrammed shape according to coded information, which we call DNA, compactly stacked panels named the zygote structure can evolve into arbitrary 3-D structures by programming their connection path. Our stacking algorithm obtains this coded sequence by inversely stacking the voxelized surface of the desired structure into a tree. Applying the connection path obtained by the stacking algorithm, the compactly stacked panels named the zygote structure can be deployed into diverse large 3-D structures. We conceptually demonstrated our pluripotent evolving structure by energy releasing commercial spring hinges and thermally actuated shape memory alloy (SMA) hinges, respectively. We also show that the proposed concept enables the fabrication of large structures in a significantly smaller workspace.
Metal Blossom: Laser Forming Complex and Freeform Metal Structures Imitating Flower Blooming
Nov 30, 2021
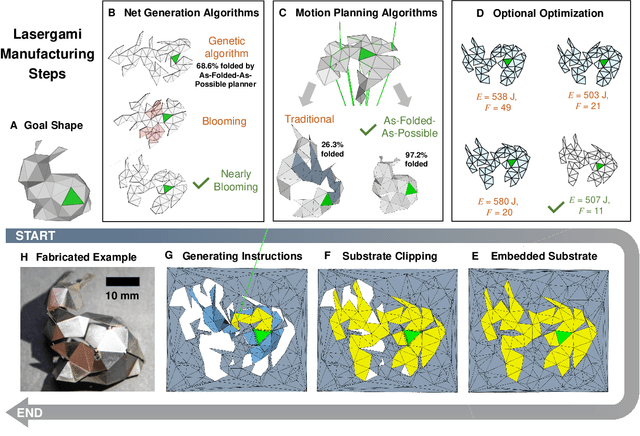
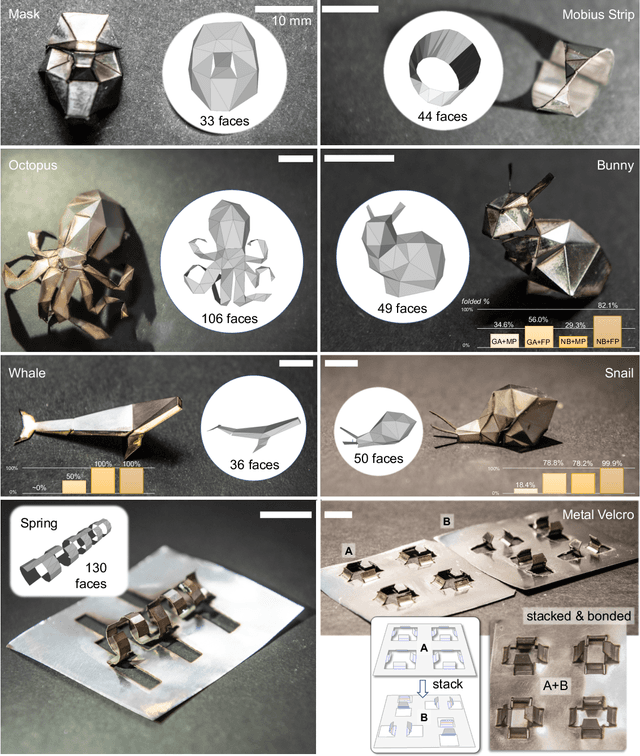
For centuries, human civilizations devised metal forming techniques to make tools and items; yet, customized metal forming remains costly and intricate. Laser-forming origami} (lasergami) is a metal forming process where a laser beam cuts and folds a planar metal sheet to form a three-dimensional (3D) shape. Designing foldable structures formable by lasers, however, has long been a trial-and-error practice that requires significant mental effort and hinders the possibility of creating practical structures. This work demonstrates for the first time that lasergami can form a freeform set of metallic structures previously believed to have been impossible to be laser-formed. This technological breakthrough is enabled by new computational origami methods that imitate flower blooming and optimize laser folding instructions. Combined with new ideas that address laser line of sight and minimize fabrication energy, we report a low-cost manufacturing framework that can be readily adopted by hobbyists and professionals alike.
Persistent Covering of a Graph under Latency and Energy Constraints
Jan 25, 2021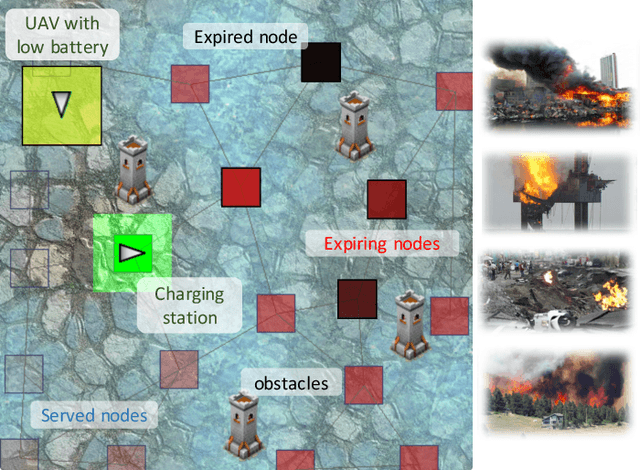
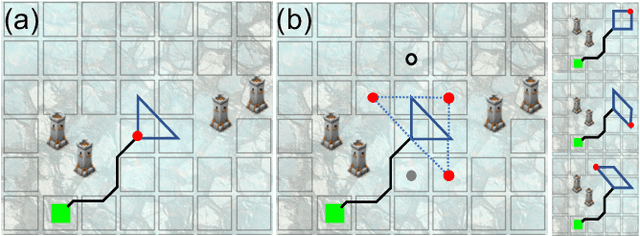
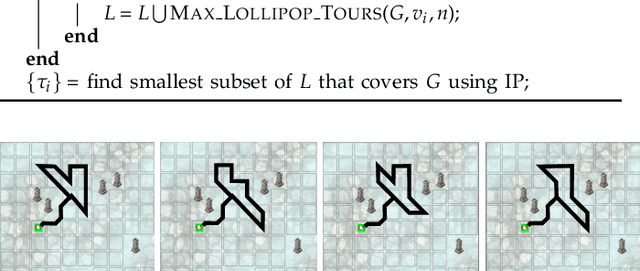
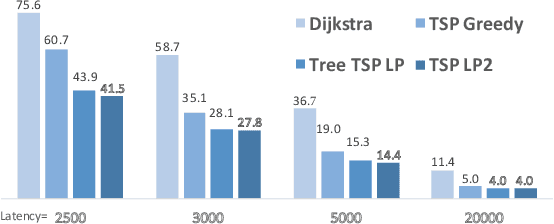
Most consumer-level low-cost unmanned aerial vehicles (UAVs) have limited battery power and long charging time. Due to these energy constraints, they cannot accomplish many practical tasks, such as monitoring a sport or political event for hours. The problem of providing the service to cover an area for an extended time is known as persistent covering in the literature. In the past, researchers have proposed various hardware platforms, such as battery-swapping mechanisms, to provide persistent covering. However, algorithmic approaches are limited mostly due to the computational complexity and intractability of the problem. Approximation algorithms have been considered to segment a large area into smaller cells that require periodic visits under the latency constraints. However, these methods assume unlimited energy. In this paper, we explore geometric and topological properties that allow us to significantly reduce the size of the optimization problem. Consequently, the proposed method can efficiently determine the minimum number of UAVs needed and schedule their routes to cover an area persistently. We demonstrated experimentally that the proposed algorithm has better performance than the baseline methods.
Planning Folding Motion with Simulation in the Loop Using Laser Forming Origami and Thermal Behaviors as an Example
Nov 20, 2020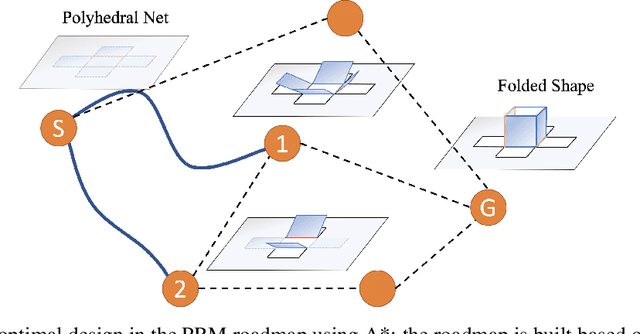
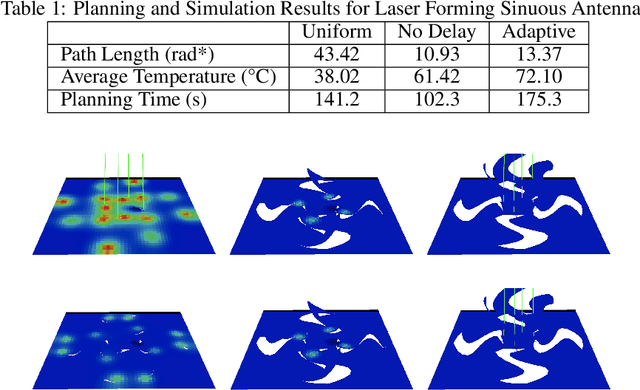
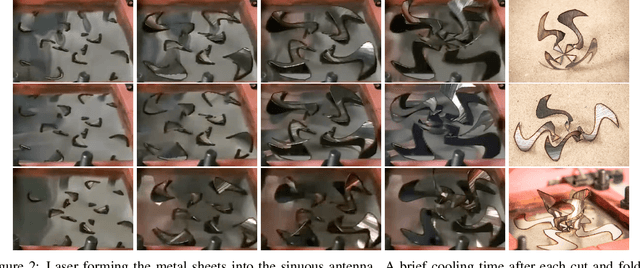
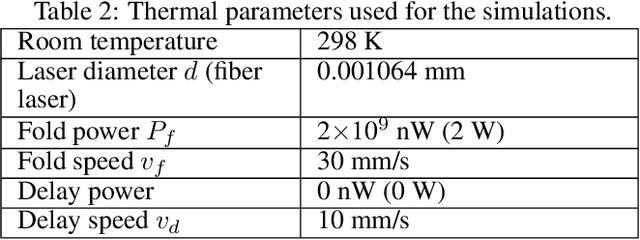
Designing a robot or structure that can fold itself into a target shape is a process that involves challenges originated from multiple sources. For example, the designer of rigid self-folding robots must consider foldability from geometric and kinematic aspects to avoid self-intersection and undesired deformations. Recent works have shown success in estimating foldability of a design using robot motion planners. However, many foldable structures are actuated using physically coupled reactions (i.e., folding originated from thermal, chemical, or electromagnetic loads). Therefore, a reliable foldability analysis must consider additional constraints that resulted from these critical phenomena. This work investigates the idea of efficiently incorporating computationally expensive physics simulation within the folding motion planner to provide a better estimation of the foldability. In this paper, we will use laser forming origami as an example to demonstrate the benefits of considering the properties beyond geometry. We show that the design produced by the proposed method can be folded more efficiently.
Designing Human-Robot Coexistence Space
Nov 14, 2020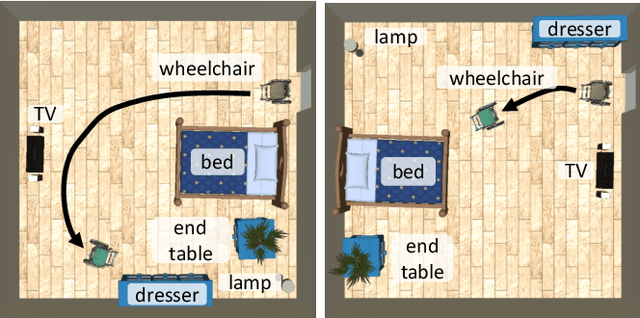
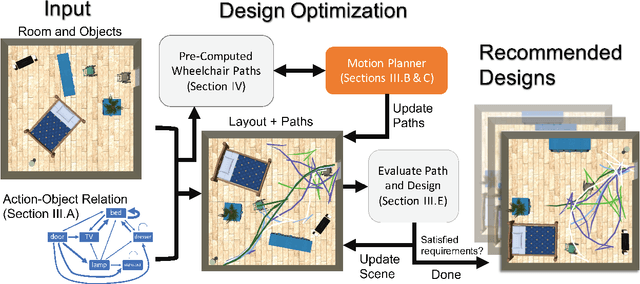

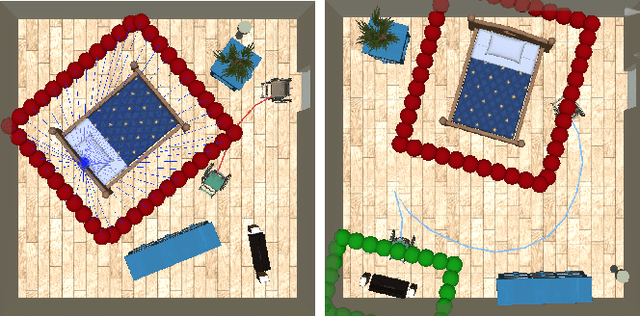
When the human-robot interactions become ubiquitous, the environment surrounding these interactions will have significant impact on the safety and comfort of the human and the effectiveness and efficiency of the robot. Although most robots are designed to work in the spaces created for humans, many environments, such as living rooms and offices, can be and should be redesigned to enhance and improve human-robot collaboration and interactions. This work uses autonomous wheelchair as an example and investigates the computational design in the human-robot coexistence spaces. Given the room size and the objects $O$ in the room, the proposed framework computes the optimal layouts of $O$ that satisfy both human preferences and navigation constraints of the wheelchair. The key enabling technique is a motion planner that can efficiently evaluate hundreds of similar motion planning problems. Our implementation shows that the proposed framework can produce a design around three to five minutes on average comparing to 10 to 20 minutes without the proposed motion planner. Our results also show that the proposed method produces reasonable designs even for tight spaces and for users with different preferences.
Learning to Herd Agents Amongst Obstacles: Training Robust Shepherding Behaviors using Deep Reinforcement Learning
May 19, 2020


Robotic shepherding problem considers the control and navigation of a group of coherent agents (e.g., a flock of bird or a fleet of drones) through the motion of an external robot, called shepherd. Machine learning based methods have successfully solved this problem in an empty environment with no obstacles. Rule-based methods, on the other hand, can handle more complex scenarios in which environments are cluttered with obstacles and allow multiple shepherds to work collaboratively. However, these rule-based methods are fragile due to the difficulty in defining a comprehensive set of rules that can handle all possible cases. To overcome these limitations, we propose the first known learning-based method that can herd agents amongst obstacles. By using deep reinforcement learning techniques combined with the probabilistic roadmaps, we train a shepherding model using noisy but controlled environmental and behavioral parameters. Our experimental results show that the proposed method is robust, namely, it is insensitive to the uncertainties originated from both environmental and behavioral models. Consequently, the proposed method has a higher success rate, shorter completion time and path length than the rule-based behavioral methods have. These advantages are particularly prominent in more challenging scenarios involving more difficult groups and strenuous passages.
Material Editing Using a Physically Based Rendering Network
Aug 09, 2017

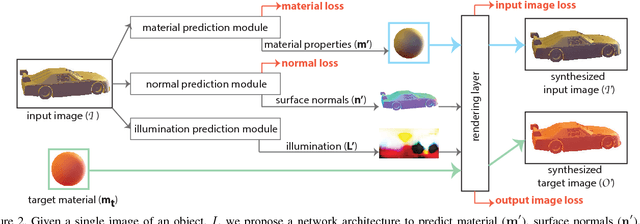
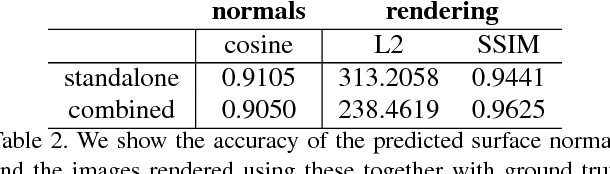
The ability to edit materials of objects in images is desirable by many content creators. However, this is an extremely challenging task as it requires to disentangle intrinsic physical properties of an image. We propose an end-to-end network architecture that replicates the forward image formation process to accomplish this task. Specifically, given a single image, the network first predicts intrinsic properties, i.e. shape, illumination, and material, which are then provided to a rendering layer. This layer performs in-network image synthesis, thereby enabling the network to understand the physics behind the image formation process. The proposed rendering layer is fully differentiable, supports both diffuse and specular materials, and thus can be applicable in a variety of problem settings. We demonstrate a rich set of visually plausible material editing examples and provide an extensive comparative study.