 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanning Folding Motion with Simulation in the Loop Using Laser Forming Origami and Thermal Behaviors as an Example
Paper and Code
Nov 20, 2020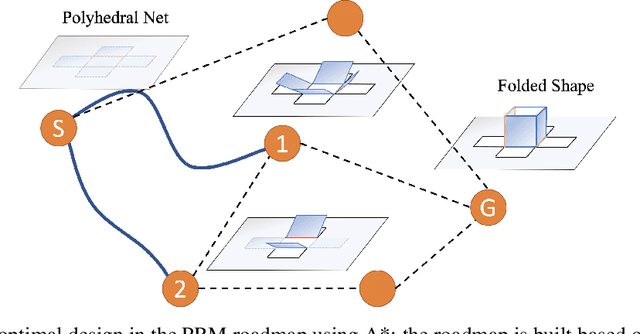
Designing a robot or structure that can fold itself into a target shape is a process that involves challenges originated from multiple sources. For example, the designer of rigid self-folding robots must consider foldability from geometric and kinematic aspects to avoid self-intersection and undesired deformations. Recent works have shown success in estimating foldability of a design using robot motion planners. However, many foldable structures are actuated using physically coupled reactions (i.e., folding originated from thermal, chemical, or electromagnetic loads). Therefore, a reliable foldability analysis must consider additional constraints that resulted from these critical phenomena. This work investigates the idea of efficiently incorporating computationally expensive physics simulation within the folding motion planner to provide a better estimation of the foldability. In this paper, we will use laser forming origami as an example to demonstrate the benefits of considering the properties beyond geometry. We show that the design produced by the proposed method can be folded more efficiently.