 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving Human-Robot Collaboration via Computational Design
Mar 20, 2023When robots entered our day-to-day life, the shared space surrounding humans and robots is critical for effective Human-Robot collaboration. The design of shared space should satisfy humans' preferences and robots' efficiency. This work uses kitchen design as an example to illustrate the importance of good space design in facilitating such collaboration. Given the kitchen boundary, counters, and recipes, the proposed method computes the optimal placement of counters that meet the requirement of kitchen design rules and improve Human-Robot collaboration. The key technical challenge is that the optimization method usually evaluates thousands of designs and the computational cost of motion planning, which is part of the evaluation function, is expensive. We use a decentralized motion planner that can solve multi-agent motion planning efficiently. Our results indicate that optimized kitchen designs can provide noticeable performance improvement to Human-Robot collaboration.
Designing Human-Robot Coexistence Space
Nov 14, 2020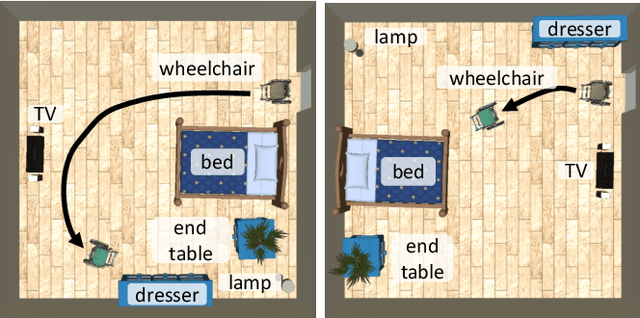
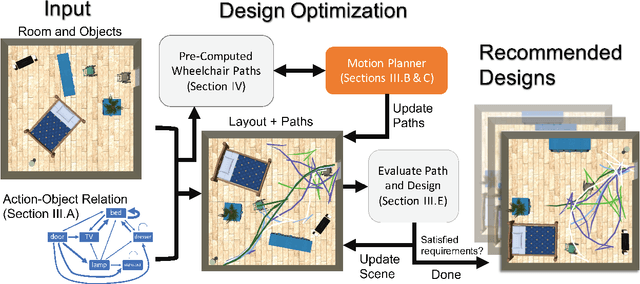

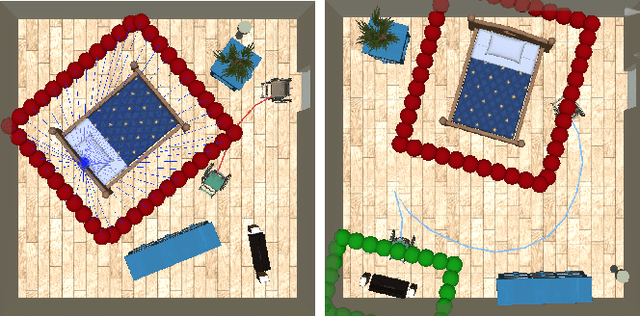
When the human-robot interactions become ubiquitous, the environment surrounding these interactions will have significant impact on the safety and comfort of the human and the effectiveness and efficiency of the robot. Although most robots are designed to work in the spaces created for humans, many environments, such as living rooms and offices, can be and should be redesigned to enhance and improve human-robot collaboration and interactions. This work uses autonomous wheelchair as an example and investigates the computational design in the human-robot coexistence spaces. Given the room size and the objects $O$ in the room, the proposed framework computes the optimal layouts of $O$ that satisfy both human preferences and navigation constraints of the wheelchair. The key enabling technique is a motion planner that can efficiently evaluate hundreds of similar motion planning problems. Our implementation shows that the proposed framework can produce a design around three to five minutes on average comparing to 10 to 20 minutes without the proposed motion planner. Our results also show that the proposed method produces reasonable designs even for tight spaces and for users with different preferences.
Learning to Herd Agents Amongst Obstacles: Training Robust Shepherding Behaviors using Deep Reinforcement Learning
May 19, 2020


Robotic shepherding problem considers the control and navigation of a group of coherent agents (e.g., a flock of bird or a fleet of drones) through the motion of an external robot, called shepherd. Machine learning based methods have successfully solved this problem in an empty environment with no obstacles. Rule-based methods, on the other hand, can handle more complex scenarios in which environments are cluttered with obstacles and allow multiple shepherds to work collaboratively. However, these rule-based methods are fragile due to the difficulty in defining a comprehensive set of rules that can handle all possible cases. To overcome these limitations, we propose the first known learning-based method that can herd agents amongst obstacles. By using deep reinforcement learning techniques combined with the probabilistic roadmaps, we train a shepherding model using noisy but controlled environmental and behavioral parameters. Our experimental results show that the proposed method is robust, namely, it is insensitive to the uncertainties originated from both environmental and behavioral models. Consequently, the proposed method has a higher success rate, shorter completion time and path length than the rule-based behavioral methods have. These advantages are particularly prominent in more challenging scenarios involving more difficult groups and strenuous passages.