 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeYou Only Pose Once: A Minimalist's Detection Transformer for Monocular RGB Category-level 9D Multi-Object Pose Estimation
Aug 20, 2025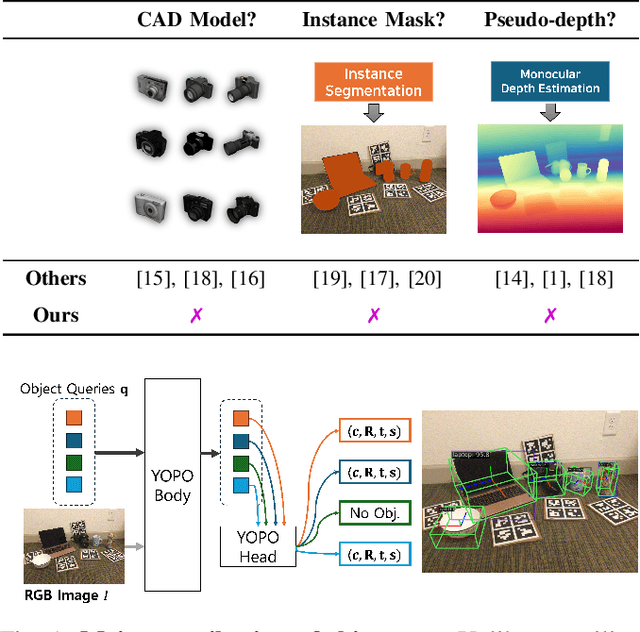
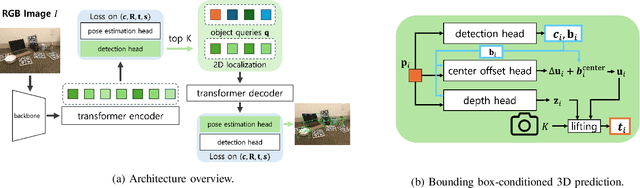
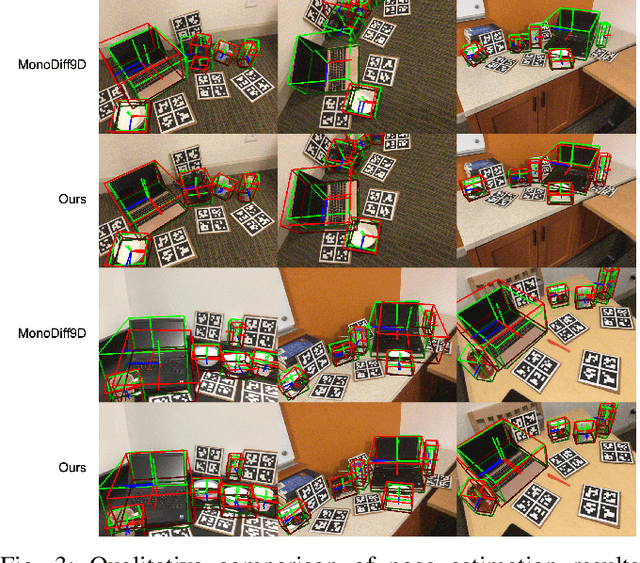
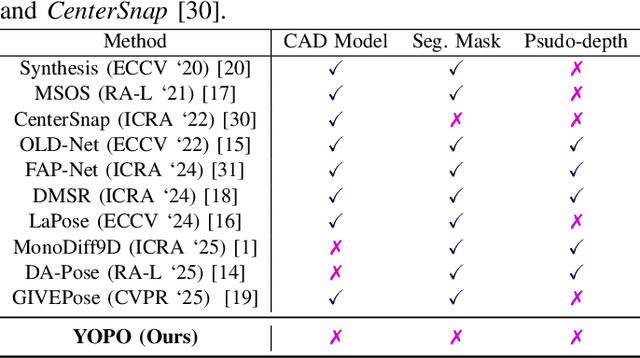
Accurately recovering the full 9-DoF pose of unseen instances within specific categories from a single RGB image remains a core challenge for robotics and automation. Most existing solutions still rely on pseudo-depth, CAD models, or multi-stage cascades that separate 2D detection from pose estimation. Motivated by the need for a simpler, RGB-only alternative that learns directly at the category level, we revisit a longstanding question: Can object detection and 9-DoF pose estimation be unified with high performance, without any additional data? We show that they can with our method, YOPO, a single-stage, query-based framework that treats category-level 9-DoF estimation as a natural extension of 2D detection. YOPO augments a transformer detector with a lightweight pose head, a bounding-box-conditioned translation module, and a 6D-aware Hungarian matching cost. The model is trained end-to-end only with RGB images and category-level pose labels. Despite its minimalist design, YOPO sets a new state of the art on three benchmarks. On the REAL275 dataset, it achieves 79.6% $\rm{IoU}_{50}$ and 54.1% under the $10^\circ$$10{\rm{cm}}$ metric, surpassing prior RGB-only methods and closing much of the gap to RGB-D systems. The code, models, and additional qualitative results can be found on our project.
Posture-Informed Muscular Force Learning for Robust Hand Pressure Estimation
Oct 31, 2024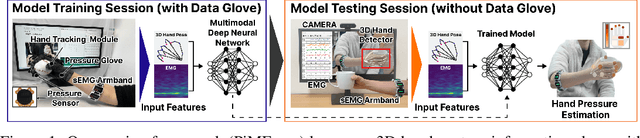
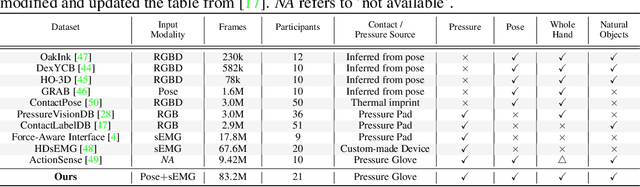
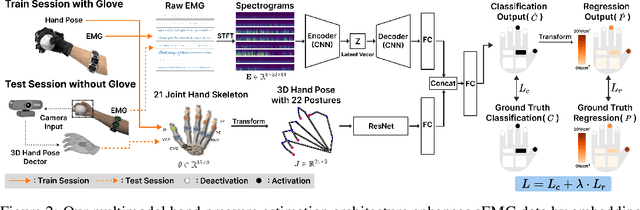

We present PiMForce, a novel framework that enhances hand pressure estimation by leveraging 3D hand posture information to augment forearm surface electromyography (sEMG) signals. Our approach utilizes detailed spatial information from 3D hand poses in conjunction with dynamic muscle activity from sEMG to enable accurate and robust whole-hand pressure measurements under diverse hand-object interactions. We also developed a multimodal data collection system that combines a pressure glove, an sEMG armband, and a markerless finger-tracking module. We created a comprehensive dataset from 21 participants, capturing synchronized data of hand posture, sEMG signals, and exerted hand pressure across various hand postures and hand-object interaction scenarios using our collection system. Our framework enables precise hand pressure estimation in complex and natural interaction scenarios. Our approach substantially mitigates the limitations of traditional sEMG-based or vision-based methods by integrating 3D hand posture information with sEMG signals. Video demos, data, and code are available online.
Masked Autoregressive Model for Weather Forecasting
Sep 30, 2024The growing impact of global climate change amplifies the need for accurate and reliable weather forecasting. Traditional autoregressive approaches, while effective for temporal modeling, suffer from error accumulation in long-term prediction tasks. The lead time embedding method has been suggested to address this issue, but it struggles to maintain crucial correlations in atmospheric events. To overcome these challenges, we propose the Masked Autoregressive Model for Weather Forecasting (MAM4WF). This model leverages masked modeling, where portions of the input data are masked during training, allowing the model to learn robust spatiotemporal relationships by reconstructing the missing information. MAM4WF combines the advantages of both autoregressive and lead time embedding methods, offering flexibility in lead time modeling while iteratively integrating predictions. We evaluate MAM4WF across weather, climate forecasting, and video frame prediction datasets, demonstrating superior performance on five test datasets.
Pushing the Limits of Vision-Language Models in Remote Sensing without Human Annotations
Sep 11, 2024The prominence of generalized foundation models in vision-language integration has witnessed a surge, given their multifarious applications. Within the natural domain, the procurement of vision-language datasets to construct these foundation models is facilitated by their abundant availability and the ease of web crawling. Conversely, in the remote sensing domain, although vision-language datasets exist, their volume is suboptimal for constructing robust foundation models. This study introduces an approach to curate vision-language datasets by employing an image decoding machine learning model, negating the need for human-annotated labels. Utilizing this methodology, we amassed approximately 9.6 million vision-language paired datasets in VHR imagery. The resultant model outperformed counterparts that did not leverage publicly available vision-language datasets, particularly in downstream tasks such as zero-shot classification, semantic localization, and image-text retrieval. Moreover, in tasks exclusively employing vision encoders, such as linear probing and k-NN classification, our model demonstrated superior efficacy compared to those relying on domain-specific vision-language datasets.
Geometric Remove-and-Retrain (GOAR): Coordinate-Invariant eXplainable AI Assessment
Jul 17, 2024Identifying the relevant input features that have a critical influence on the output results is indispensable for the development of explainable artificial intelligence (XAI). Remove-and-Retrain (ROAR) is a widely accepted approach for assessing the importance of individual pixels by measuring changes in accuracy following their removal and subsequent retraining of the modified dataset. However, we uncover notable limitations in pixel-perturbation strategies. When viewed from a geometric perspective, we discover that these metrics fail to discriminate between differences among feature attribution methods, thereby compromising the reliability of the evaluation. To address this challenge, we introduce an alternative feature-perturbation approach named Geometric Remove-and-Retrain (GOAR). Through a series of experiments with both synthetic and real datasets, we substantiate that GOAR transcends the limitations of pixel-centric metrics.
Prototype-oriented Unsupervised Change Detection for Disaster Management
Oct 17, 2023


Climate change has led to an increased frequency of natural disasters such as floods and cyclones. This emphasizes the importance of effective disaster monitoring. In response, the remote sensing community has explored change detection methods. These methods are primarily categorized into supervised techniques, which yield precise results but come with high labeling costs, and unsupervised techniques, which eliminate the need for labeling but involve intricate hyperparameter tuning. To address these challenges, we propose a novel unsupervised change detection method named Prototype-oriented Unsupervised Change Detection for Disaster Management (PUCD). PUCD captures changes by comparing features from pre-event, post-event, and prototype-oriented change synthesis images via a foundational model, and refines results using the Segment Anything Model (SAM). Although PUCD is an unsupervised change detection, it does not require complex hyperparameter tuning. We evaluate PUCD framework on the LEVIR-Extension dataset and the disaster dataset and it achieves state-of-the-art performance compared to other methods on the LEVIR-Extension dataset.
RHINO: Rotated DETR with Dynamic Denoising via Hungarian Matching for Oriented Object Detection
May 15, 2023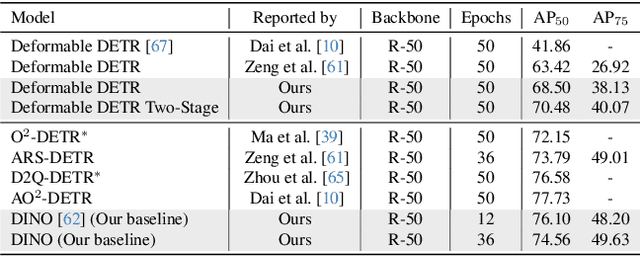
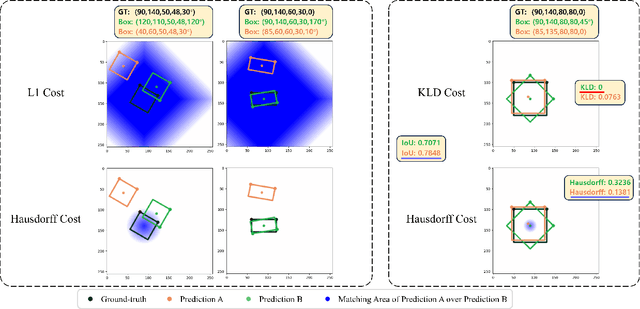

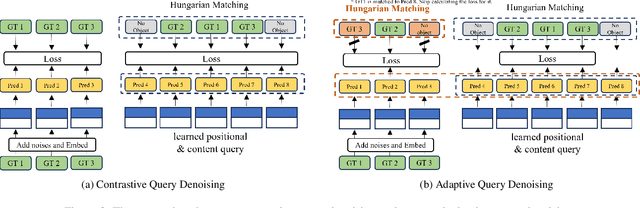
With the publication of DINO, a variant of the Detection Transformer (DETR), Detection Transformers are breaking the record in the object detection benchmark with the merits of their end-to-end design and scalability. However, the extension of DETR to oriented object detection has not been thoroughly studied although more benefits from its end-to-end architecture are expected such as removing NMS and anchor-related costs. In this paper, we propose a first strong DINO-based baseline for oriented object detection. We found that straightforward employment of DETRs for oriented object detection does not guarantee non-duplicate prediction, and propose a simple cost to mitigate this. Furthermore, we introduce a $\textit{dynamic denoising}$ strategy that uses Hungarian matching to filter redundant noised queries and $\textit{query alignment}$ to preserve matching consistency between Transformer decoder layers. Our proposed model outperforms previous rotated DETRs and other counterparts, achieving state-of-the-art performance in DOTA-v1.0/v1.5/v2.0, and DIOR-R benchmarks.
On Pitfalls of $\textit{RemOve-And-Retrain}$: Data Processing Inequality Perspective
May 11, 2023Approaches for appraising feature importance approximations, alternatively referred to as attribution methods, have been established across an extensive array of contexts. The development of resilient techniques for performance benchmarking constitutes a critical concern in the sphere of explainable deep learning. This study scrutinizes the dependability of the RemOve-And-Retrain (ROAR) procedure, which is prevalently employed for gauging the performance of feature importance estimates. The insights gleaned from our theoretical foundation and empirical investigations reveal that attributions containing lesser information about the decision function may yield superior results in ROAR benchmarks, contradicting the original intent of ROAR. This occurrence is similarly observed in the recently introduced variant RemOve-And-Debias (ROAD), and we posit a persistent pattern of blurriness bias in ROAR attribution metrics. Our findings serve as a warning against indiscriminate use on ROAR metrics. The code is available as open source.
A Billion-scale Foundation Model for Remote Sensing Images
Apr 11, 2023



As the potential of foundation models in visual tasks has garnered significant attention, pretraining these models before downstream tasks has become a crucial step. The three key factors in pretraining foundation models are the pretraining method, the size of the pretraining dataset, and the number of model parameters. Recently, research in the remote sensing field has focused primarily on the pretraining method and the size of the dataset, with limited emphasis on the number of model parameters. This paper addresses this gap by examining the effect of increasing the number of model parameters on the performance of foundation models in downstream tasks such as rotated object detection and semantic segmentation. We pretrained foundation models with varying numbers of parameters, including 86M, 605.26M, 1.3B, and 2.4B, to determine whether performance in downstream tasks improved with an increase in parameters. To the best of our knowledge, this is the first billion-scale foundation model in the remote sensing field. Furthermore, we propose an effective method for scaling up and fine-tuning a vision transformer in the remote sensing field. To evaluate general performance in downstream tasks, we employed the DOTA v2.0 and DIOR-R benchmark datasets for rotated object detection, and the Potsdam and LoveDA datasets for semantic segmentation. Experimental results demonstrated that, across all benchmark datasets and downstream tasks, the performance of the foundation models and data efficiency improved as the number of parameters increased. Moreover, our models achieve the state-of-the-art performance on several datasets including DIOR-R, Postdam, and LoveDA.
Implicit Stacked Autoregressive Model for Video Prediction
Mar 14, 2023



Future frame prediction has been approached through two primary methods: autoregressive and non-autoregressive. Autoregressive methods rely on the Markov assumption and can achieve high accuracy in the early stages of prediction when errors are not yet accumulated. However, their performance tends to decline as the number of time steps increases. In contrast, non-autoregressive methods can achieve relatively high performance but lack correlation between predictions for each time step. In this paper, we propose an Implicit Stacked Autoregressive Model for Video Prediction (IAM4VP), which is an implicit video prediction model that applies a stacked autoregressive method. Like non-autoregressive methods, stacked autoregressive methods use the same observed frame to estimate all future frames. However, they use their own predictions as input, similar to autoregressive methods. As the number of time steps increases, predictions are sequentially stacked in the queue. To evaluate the effectiveness of IAM4VP, we conducted experiments on three common future frame prediction benchmark datasets and weather\&climate prediction benchmark datasets. The results demonstrate that our proposed model achieves state-of-the-art performance.