 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing Robotic Precision in Construction: A Modular Factor Graph-Based Framework to Deflection and Backlash Compensation Using High-Accuracy Accelerometers
Jan 24, 2025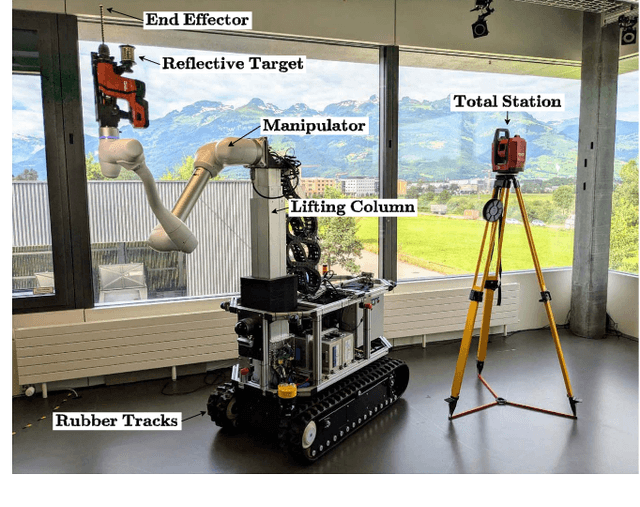
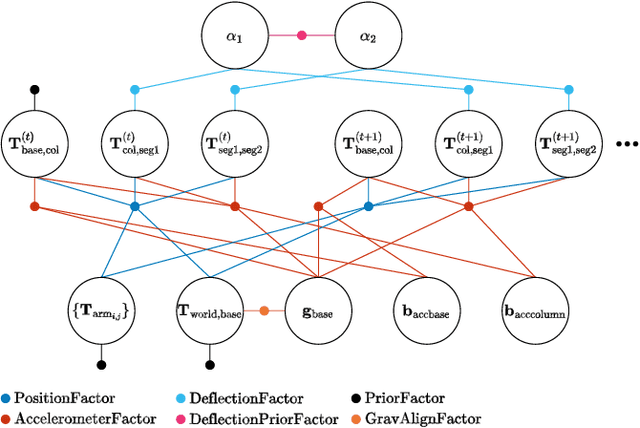
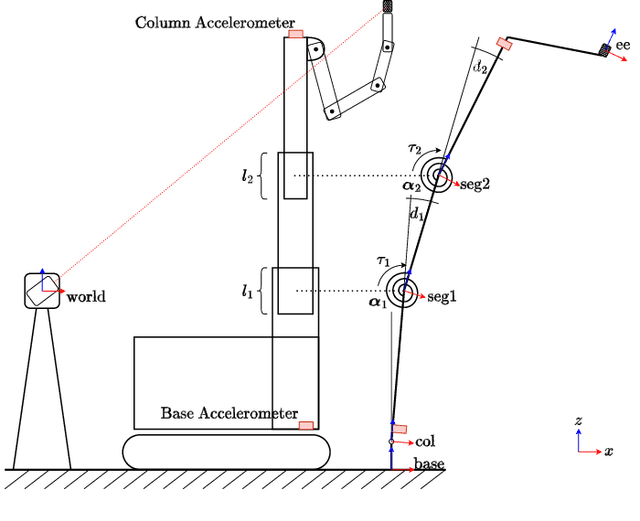
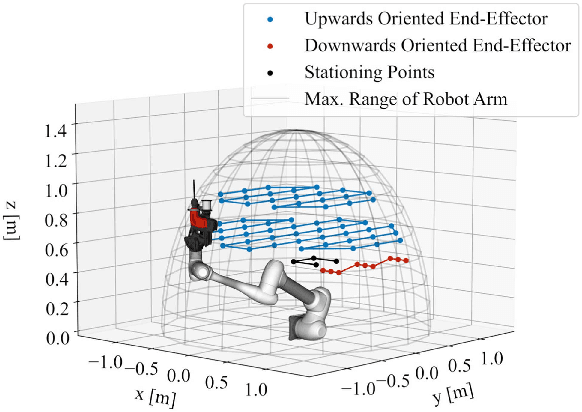
Accurate positioning is crucial in the construction industry, where labor shortages highlight the need for automation. Robotic systems with long kinematic chains are required to reach complex workspaces, including floors, walls, and ceilings. These requirements significantly impact positioning accuracy due to effects such as deflection and backlash in various parts along the kinematic chain. In this work, we introduce a novel approach that integrates deflection and backlash compensation models with high-accuracy accelerometers, significantly enhancing position accuracy. Our method employs a modular framework based on a factor graph formulation to estimate the state of the kinematic chain, leveraging acceleration measurements to inform the model. Extensive testing on publicly released datasets, reflecting real-world construction disturbances, demonstrates the advantages of our approach. The proposed method reduces the $95\%$ error threshold in the xy-plane by $50\%$ compared to the state-of-the-art Virtual Joint Method, and by $31\%$ when incorporating base tilt compensation.
* 8 pages, 7 figures, Accepted on November 2024 at IEEE Robotics and Automation Letters
Hilti SLAM Challenge 2023: Benchmarking Single + Multi-session SLAM across Sensor Constellations in Construction
Apr 15, 2024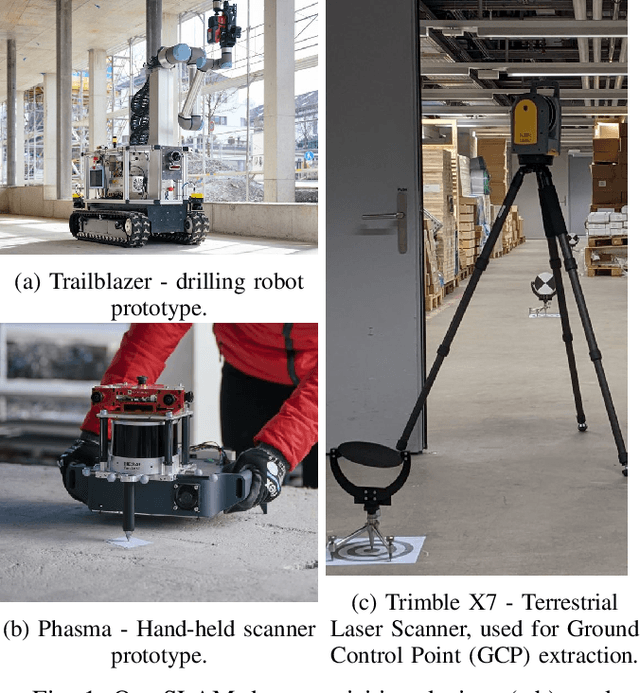
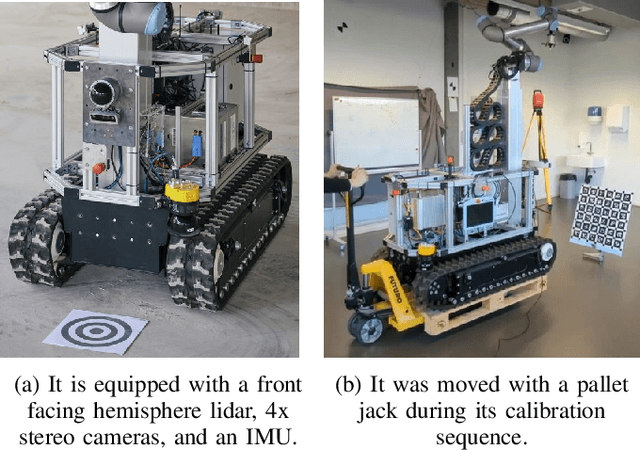
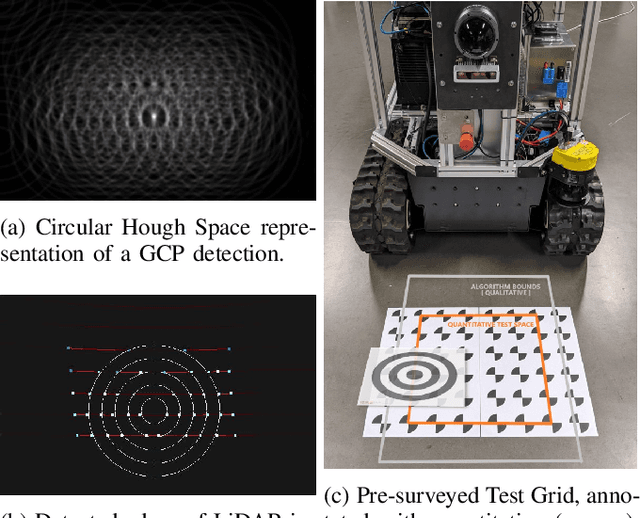
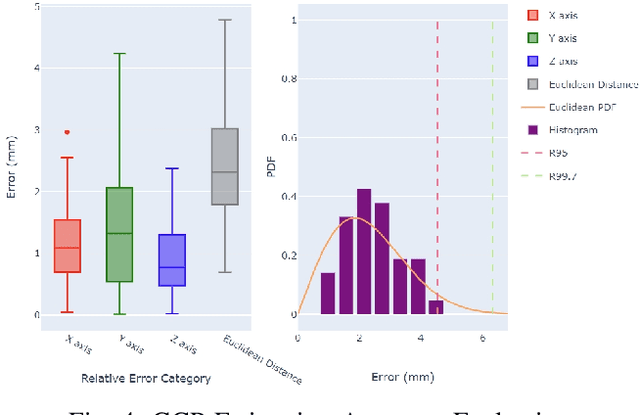
Simultaneous Localization and Mapping systems are a key enabler for positioning in both handheld and robotic applications. The Hilti SLAM Challenges organized over the past years have been successful at benchmarking some of the world's best SLAM Systems with high accuracy. However, more capabilities of these systems are yet to be explored, such as platform agnosticism across varying sensor suites and multi-session SLAM. These factors indirectly serve as an indicator of robustness and ease of deployment in real-world applications. There exists no dataset plus benchmark combination publicly available, which considers these factors combined. The Hilti SLAM Challenge 2023 Dataset and Benchmark addresses this issue. Additionally, we propose a novel fiducial marker design for a pre-surveyed point on the ground to be observable from an off-the-shelf LiDAR mounted on a robot, and an algorithm to estimate its position at mm-level accuracy. Results from the challenge show an increase in overall participation, single-session SLAM systems getting increasingly accurate, successfully operating across varying sensor suites, but relatively few participants performing multi-session SLAM.
Whole-Body Control of a Mobile Manipulator using End-to-End Reinforcement Learning
Feb 25, 2020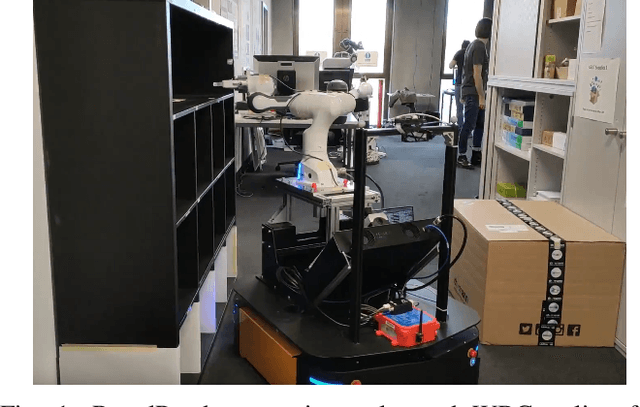
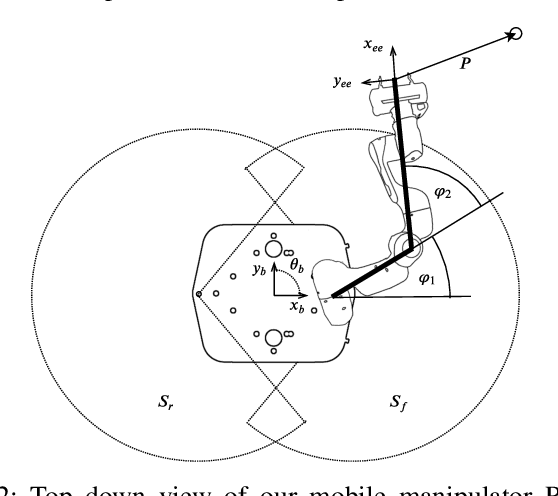
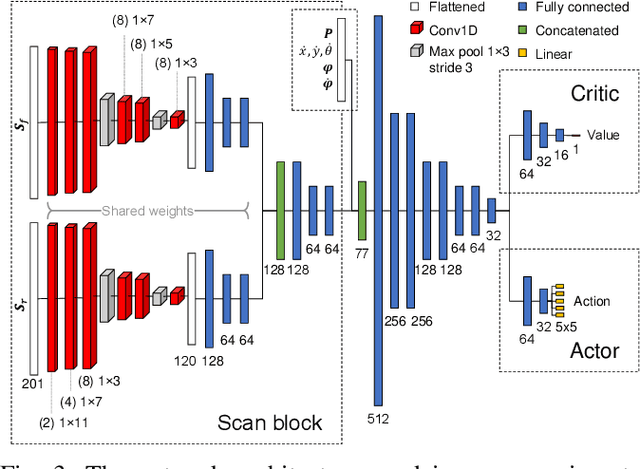
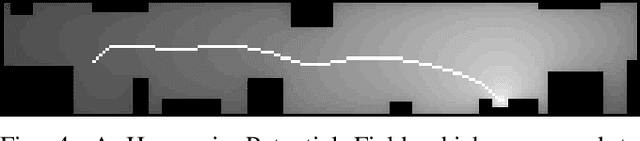
Mobile manipulation is usually achieved by sequentially executing base and manipulator movements. This simplification, however, leads to a loss in efficiency and in some cases a reduction of workspace size. Even though different methods have been proposed to solve Whole-Body Control (WBC) online, they are either limited by a kinematic model or do not allow for reactive, online obstacle avoidance. In order to overcome these drawbacks, in this work, we propose an end-to-end Reinforcement Learning (RL) approach to WBC. We compared our learned controller against a state-of-the-art sampling-based method in simulation and achieved faster overall mission times. In addition, we validated the learned policy on our mobile manipulator RoyalPanda in challenging narrow corridor environments.