 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing Robotic Precision in Construction: A Modular Factor Graph-Based Framework to Deflection and Backlash Compensation Using High-Accuracy Accelerometers
Jan 24, 2025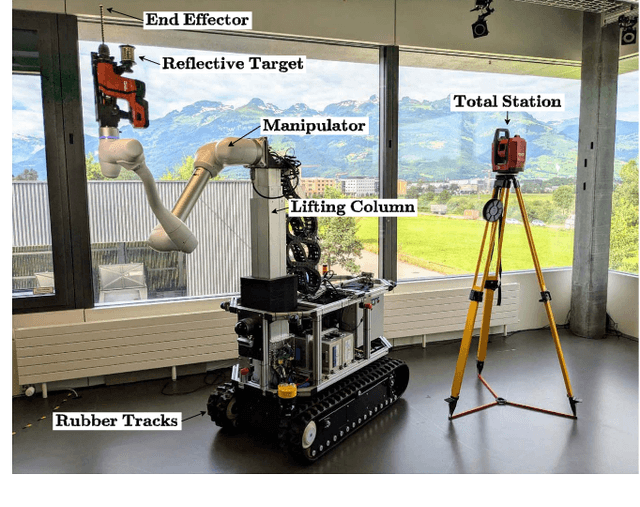
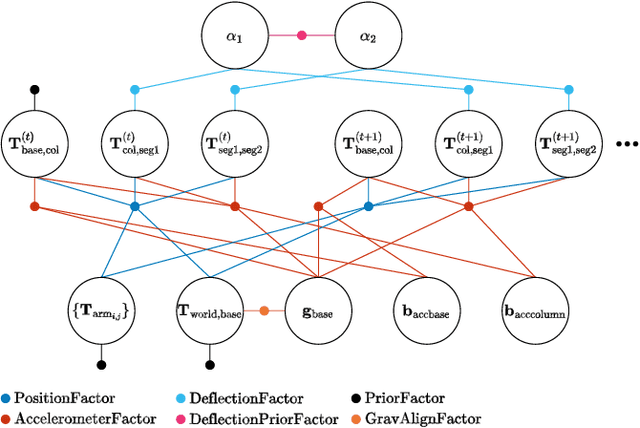
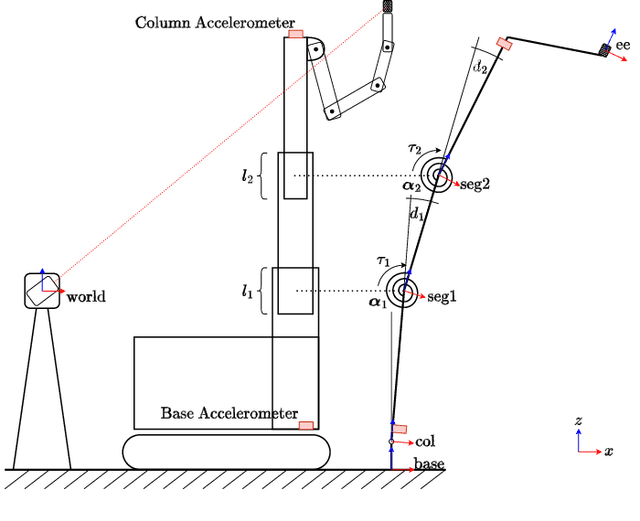
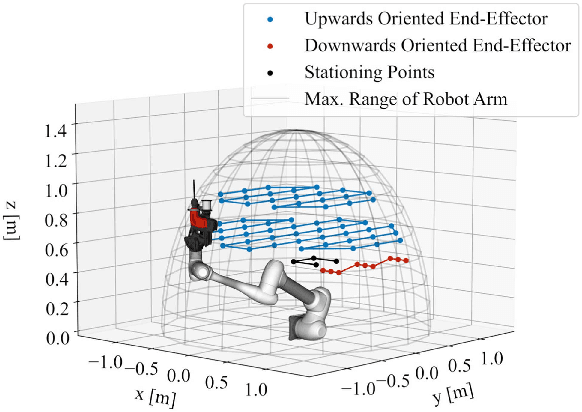
Accurate positioning is crucial in the construction industry, where labor shortages highlight the need for automation. Robotic systems with long kinematic chains are required to reach complex workspaces, including floors, walls, and ceilings. These requirements significantly impact positioning accuracy due to effects such as deflection and backlash in various parts along the kinematic chain. In this work, we introduce a novel approach that integrates deflection and backlash compensation models with high-accuracy accelerometers, significantly enhancing position accuracy. Our method employs a modular framework based on a factor graph formulation to estimate the state of the kinematic chain, leveraging acceleration measurements to inform the model. Extensive testing on publicly released datasets, reflecting real-world construction disturbances, demonstrates the advantages of our approach. The proposed method reduces the $95\%$ error threshold in the xy-plane by $50\%$ compared to the state-of-the-art Virtual Joint Method, and by $31\%$ when incorporating base tilt compensation.
* 8 pages, 7 figures, Accepted on November 2024 at IEEE Robotics and Automation Letters
Assessing the Robustness of LiDAR, Radar and Depth Cameras Against Ill-Reflecting Surfaces in Autonomous Vehicles: An Experimental Study
Sep 19, 2023Range-measuring sensors play a critical role in autonomous driving systems. While LiDAR technology has been dominant, its vulnerability to adverse weather conditions is well-documented. This paper focuses on secondary adverse conditions and the implications of ill-reflective surfaces on range measurement sensors. We assess the influence of this condition on the three primary ranging modalities used in autonomous mobile robotics: LiDAR, RADAR, and Depth-Camera. Based on accurate experimental evaluation the papers findings reveal that under ill-reflectivity, LiDAR ranging performance drops significantly to 33% of its nominal operating conditions, whereas RADAR and Depth-Cameras maintain up to 100% of their nominal distance ranging capabilities. Additionally, we demonstrate on a 1:10 scaled autonomous racecar how ill-reflectivity adversely impacts downstream robotics tasks, highlighting the necessity for robust range sensing in autonomous driving.