 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUsing simulation to quantify the performance of automotive perception systems
Mar 10, 2023



The design and evaluation of complex systems can benefit from a software simulation - sometimes called a digital twin. The simulation can be used to characterize system performance or to test its performance under conditions that are difficult to measure (e.g., nighttime for automotive perception systems). We describe the image system simulation software tools that we use to evaluate the performance of image systems for object (automobile) detection. We describe experiments with 13 different cameras with a variety of optics and pixel sizes. To measure the impact of camera spatial resolution, we designed a collection of driving scenes that had cars at many different distances. We quantified system performance by measuring average precision and we report a trend relating system resolution and object detection performance. We also quantified the large performance degradation under nighttime conditions, compared to daytime, for all cameras and a COCO pre-trained network.
Ray-transfer functions for camera simulation of 3D scenes with hidden lens design
Feb 23, 2022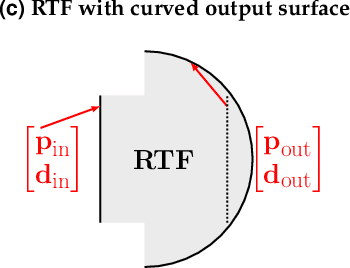
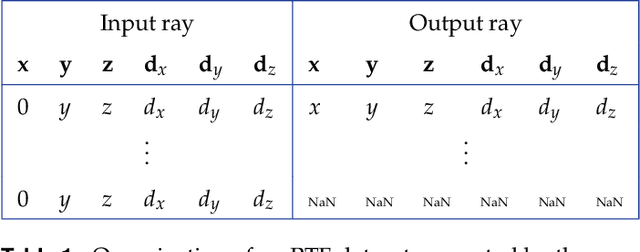
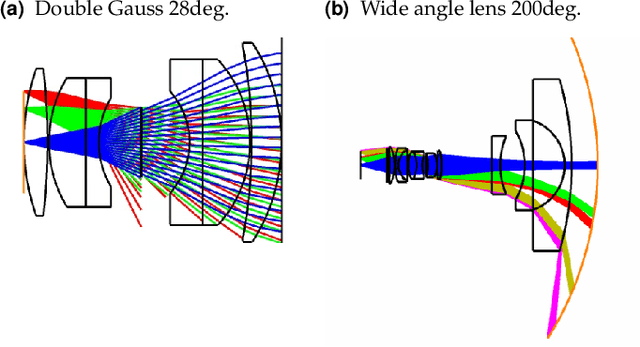
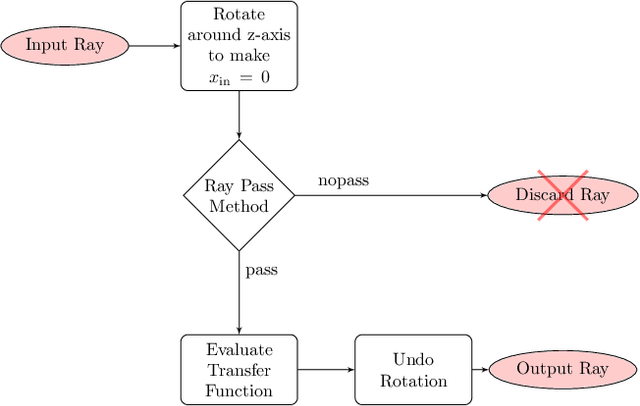
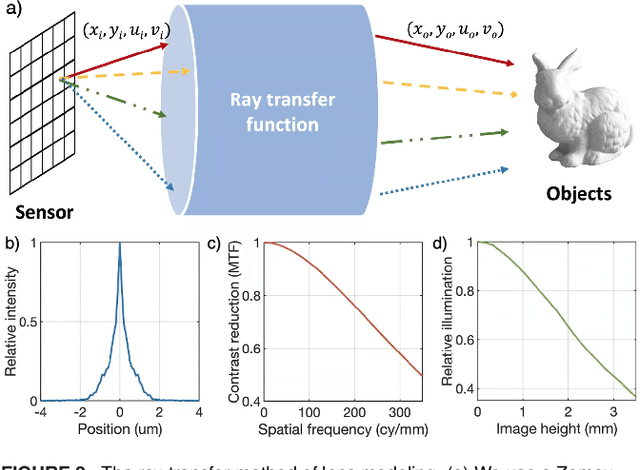
Combining image sensor simulation tools (e.g., ISETCam) with physically based ray tracing (e.g., PBRT) offers possibilities for designing and evaluating novel imaging systems as well as for synthesizing physically accurate, labeled images for machine learning. One practical limitation has been simulating the optics precisely: Lens manufacturers generally prefer to keep lens design confidential. We present a pragmatic solution to this problem using a black box lens model in Zemax; such models provide necessary optical information while preserving the lens designer's intellectual property. First, we describe and provide software to construct a polynomial ray transfer function that characterizes how rays entering the lens at any position and angle subsequently exit the lens. We implement the ray-transfer calculation as a camera model in PBRT and confirm that the PBRT ray-transfer calculations match the Zemax lens calculations for edge spread functions and relative illumination.
Accurate smartphone camera simulation using 3D scenes
Jan 28, 2022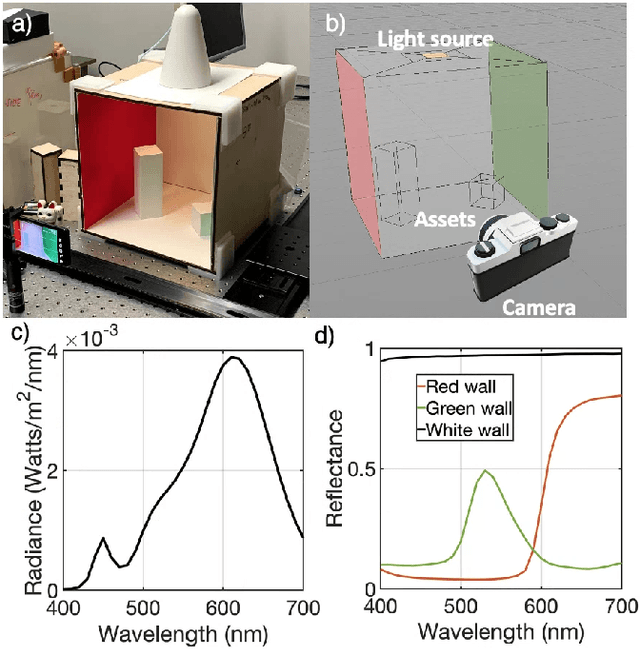
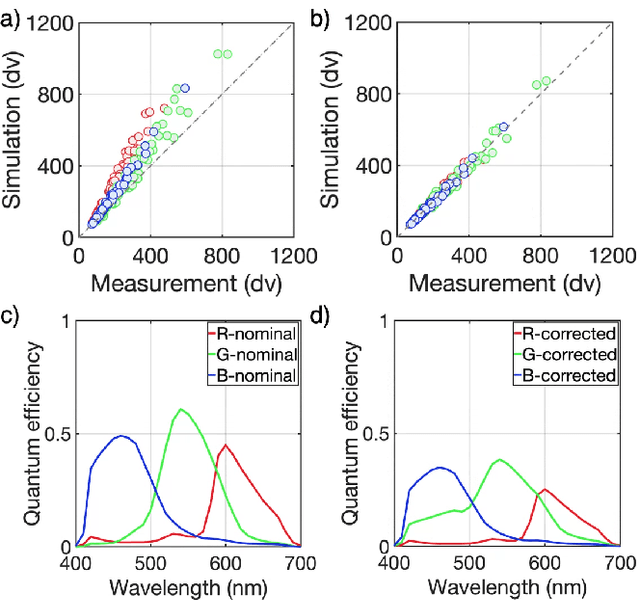
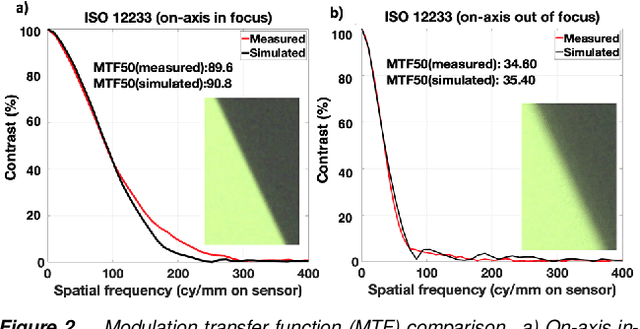
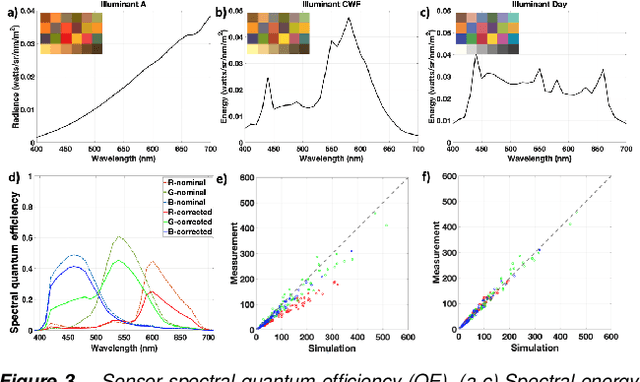
We assess the accuracy of a smartphone camera simulation. The simulation is an end-to-end analysis that begins with a physical description of a high dynamic range 3D scene and includes a specification of the optics and the image sensor. The simulation is compared to measurements of a physical version of the scene. The image system simulation accurately matched measurements of optical blur, depth of field, spectral quantum efficiency, scene inter-reflections, and sensor noise. The results support the use of image systems simulation methods for soft prototyping cameras and for producing synthetic data in machine learning applications.
Validation of image systems simulation technology using a Cornell Box
May 10, 2021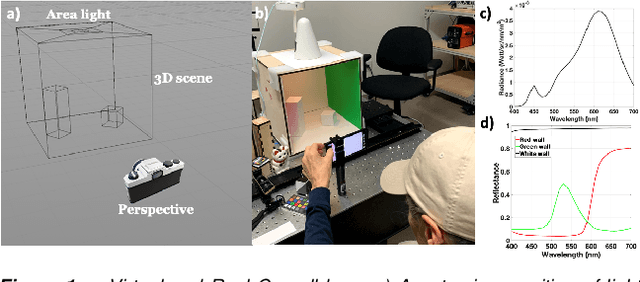
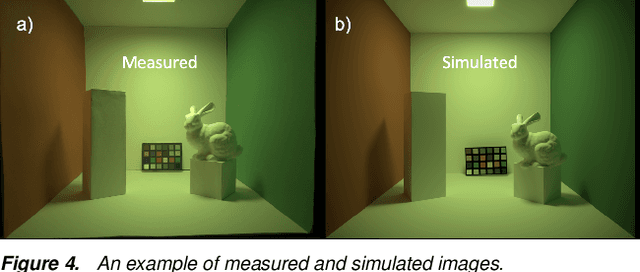
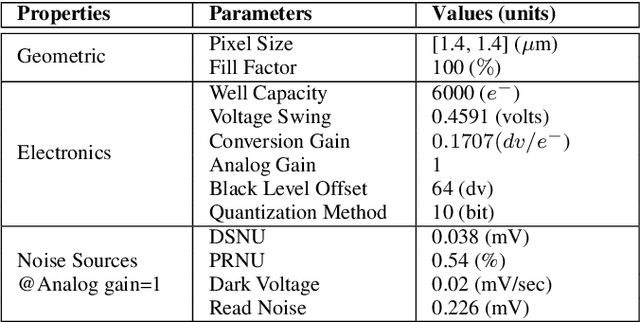
We describe and experimentally validate an end-to-end simulation of a digital camera. The simulation models the spectral radiance of 3D-scenes, formation of the spectral irradiance by multi-element optics, and conversion of the irradiance to digital values by the image sensor. We quantify the accuracy of the simulation by comparing real and simulated images of a precisely constructed, three-dimensional high dynamic range test scene. Validated end-to-end software simulation of a digital camera can accelerate innovation by reducing many of the time-consuming and expensive steps in designing, building and evaluating image systems.
ISETAuto: Detecting vehicles with depth and radiance information
Jan 07, 2021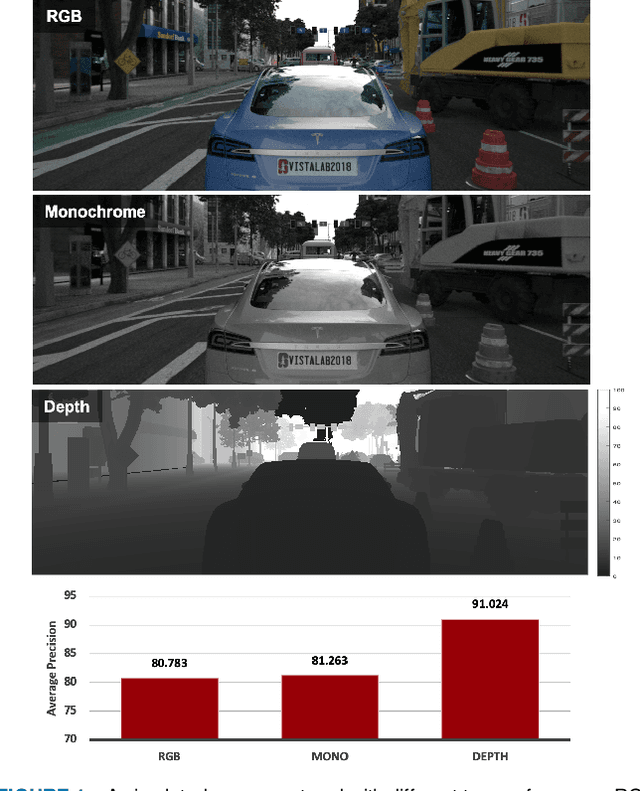
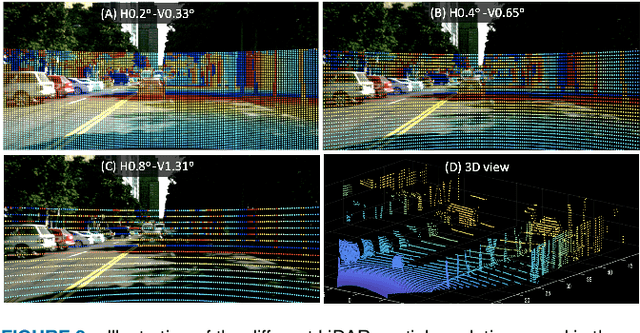
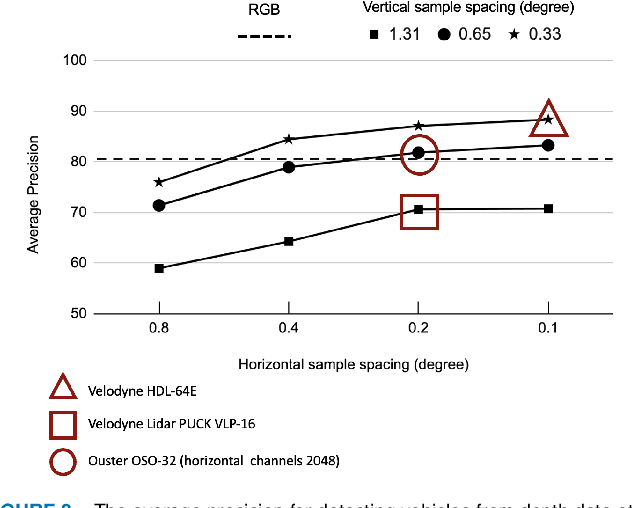
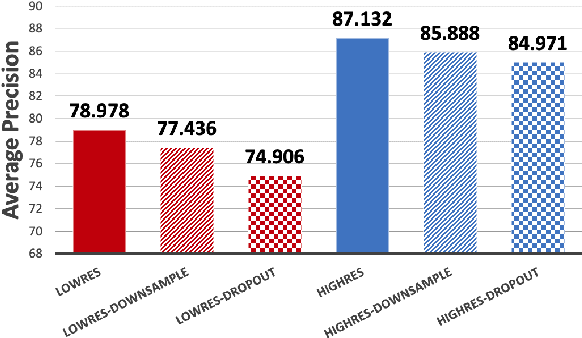
Autonomous driving applications use two types of sensor systems to identify vehicles - depth sensing LiDAR and radiance sensing cameras. We compare the performance (average precision) of a ResNet for vehicle detection in complex, daytime, driving scenes when the input is a depth map (D = d(x,y)), a radiance image (L = r(x,y)), or both [D,L]. (1) When the spatial sampling resolution of the depth map and radiance image are equal to typical camera resolutions, a ResNet detects vehicles at higher average precision from depth than radiance. (2) As the spatial sampling of the depth map declines to the range of current LiDAR devices, the ResNet average precision is higher for radiance than depth. (3) For a hybrid system that combines a depth map and radiance image, the average precision is higher than using depth or radiance alone. We established these observations in simulation and then confirmed them using realworld data. The advantage of combining depth and radiance can be explained by noting that the two type of information have complementary weaknesses. The radiance data are limited by dynamic range and motion blur. The LiDAR data have relatively low spatial resolution. The ResNet combines the two data sources effectively to improve overall vehicle detection.
Neural Network Generalization: The impact of camera parameters
Dec 08, 2019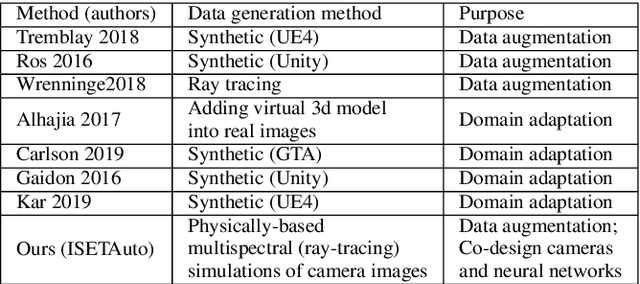
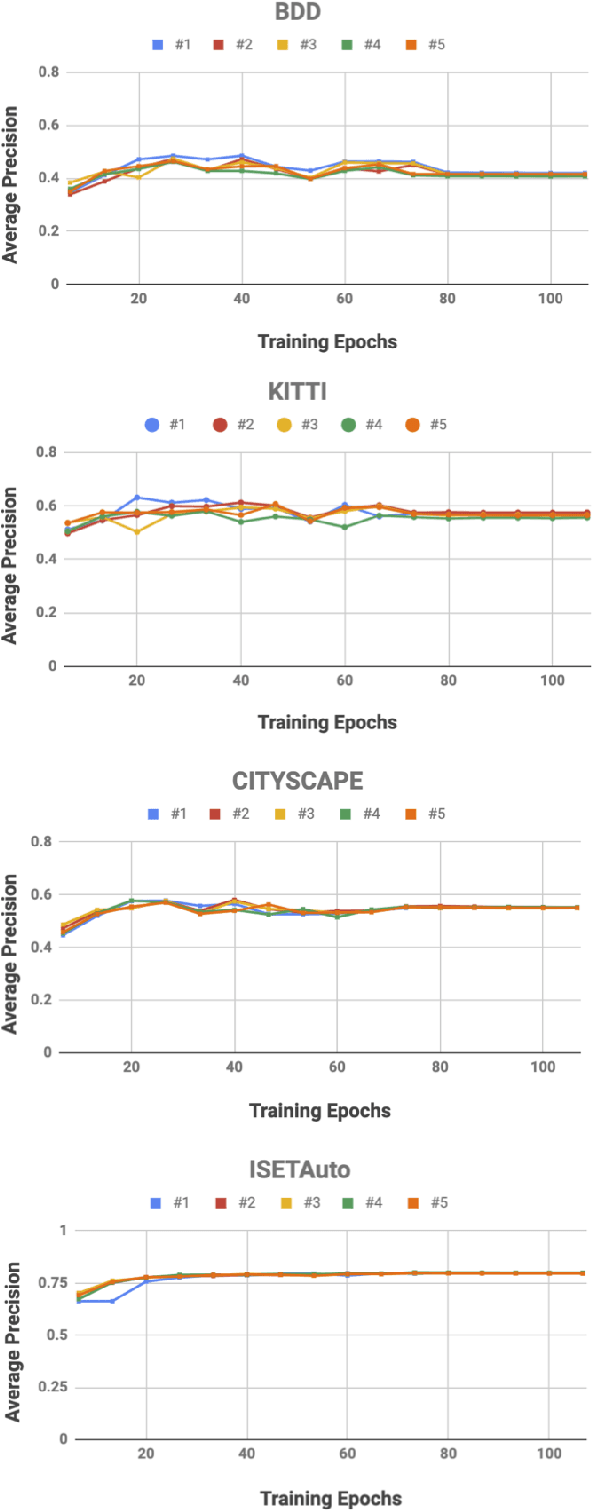
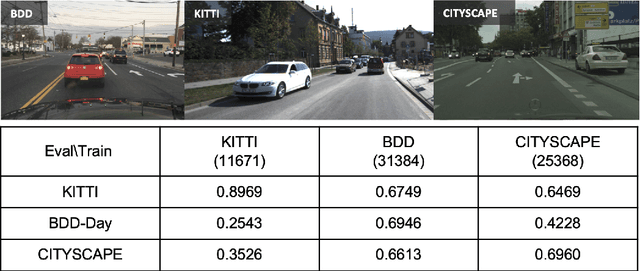
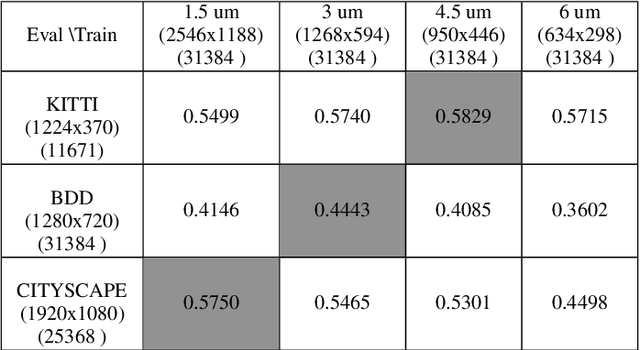
We quantify the generalization of a convolutional neural network (CNN) trained to identify cars. First, we perform a series of experiments to train the network using one image dataset - either synthetic or from a camera - and then test on a different image dataset. We show that generalization between images obtained with different cameras is roughly the same as generalization between images from a camera and ray-traced multispectral synthetic images. Second, we use ISETAuto, a soft prototyping tool that creates ray-traced multispectral simulations of camera images, to simulate sensor images with a range of pixel sizes, color filters, acquisition and post-acquisition processing. These experiments reveal how variations in specific camera parameters and image processing operations impact CNN generalization. We find that (a) pixel size impacts generalization, (b) demosaicking substantially impacts performance and generalization for shallow (8-bit) bit-depths but not deeper ones (10-bit), and (c) the network performs well using raw (not demosaicked) sensor data for 10-bit pixels.
Soft Prototyping Camera Designs for Car Detection Based on a Convolutional Neural Network
Oct 24, 2019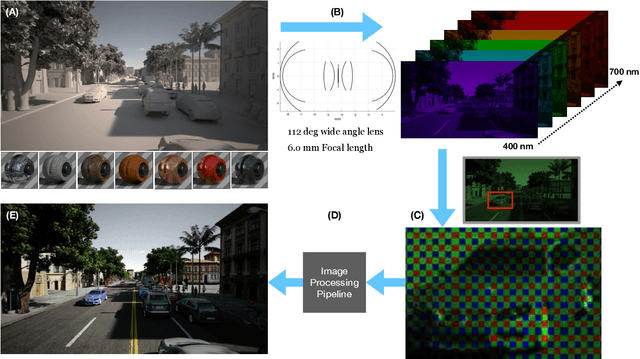
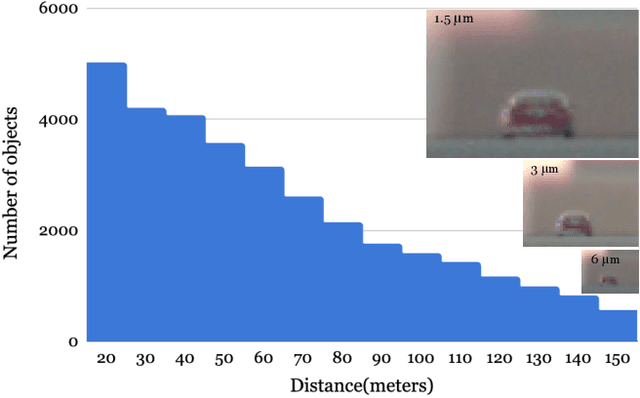
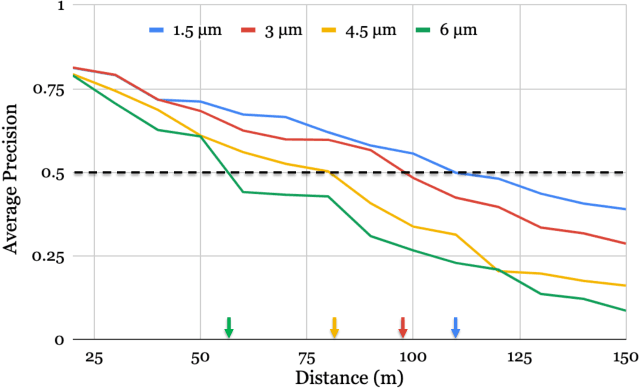
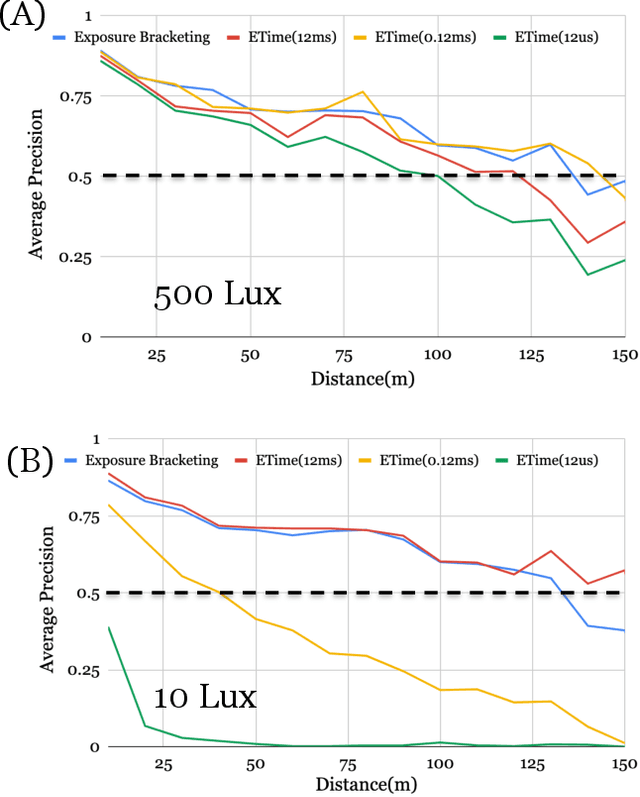
Imaging systems are increasingly used as input to convolutional neural networks (CNN) for object detection; we would like to design cameras that are optimized for this purpose. It is impractical to build different cameras and then acquire and label the necessary data for every potential camera design; creating software simulations of the camera in context (soft prototyping) is the only realistic approach. We implemented soft-prototyping tools that can quantitatively simulate image radiance and camera designs to create realistic images that are input to a convolutional neural network for car detection. We used these methods to quantify the effect that critical hardware components (pixel size), sensor control (exposure algorithms) and image processing (gamma and demosaicing algorithms) have upon average precision of car detection. We quantify (a) the relationship between pixel size and the ability to detect cars at different distances, (b) the penalty for choosing a poor exposure duration, and (c) the ability of the CNN to perform car detection for a variety of post-acquisition processing algorithms. These results show that the optimal choices for car detection are not constrained by the same metrics used for image quality in consumer photography. It is better to evaluate camera designs for CNN applications using soft prototyping with task-specific metrics rather than consumer photography metrics.
Learning the image processing pipeline
May 30, 2016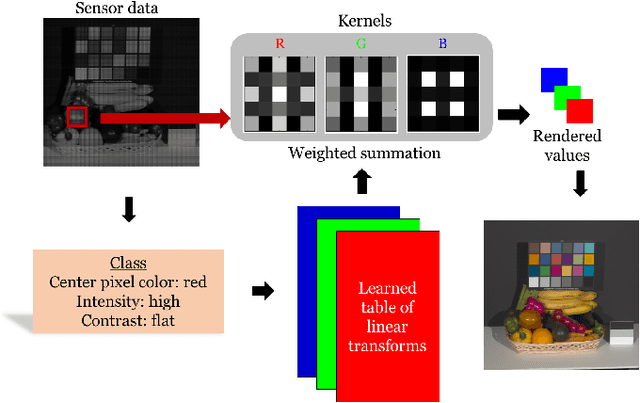
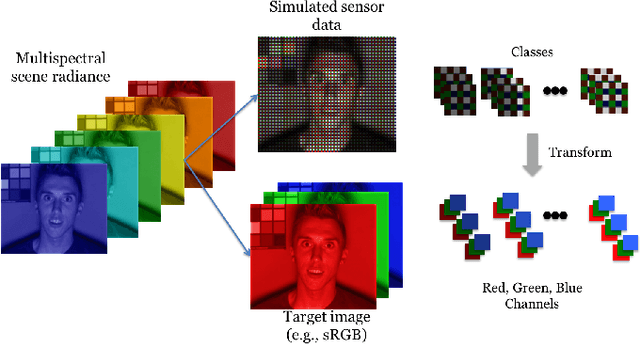
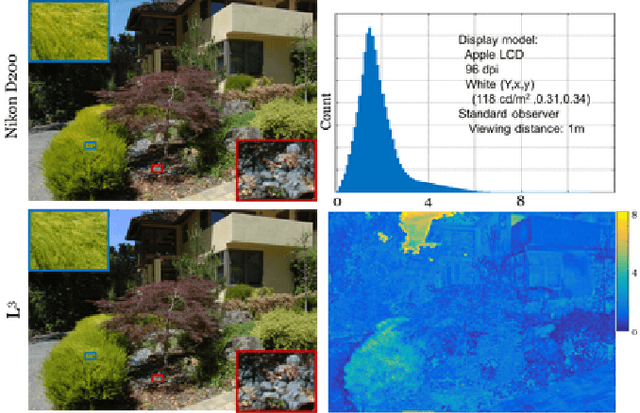

Many creative ideas are being proposed for image sensor designs, and these may be useful in applications ranging from consumer photography to computer vision. To understand and evaluate each new design, we must create a corresponding image processing pipeline that transforms the sensor data into a form that is appropriate for the application. The need to design and optimize these pipelines is time-consuming and costly. We explain a method that combines machine learning and image systems simulation that automates the pipeline design. The approach is based on a new way of thinking of the image processing pipeline as a large collection of local linear filters. We illustrate how the method has been used to design pipelines for novel sensor architectures in consumer photography applications.
Simultaneous Surface Reflectance and Fluorescence Spectra Estimation
May 13, 2016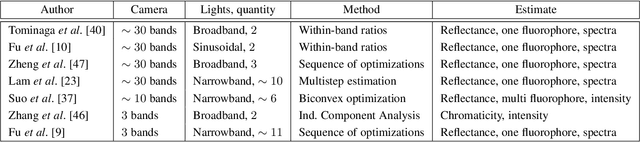
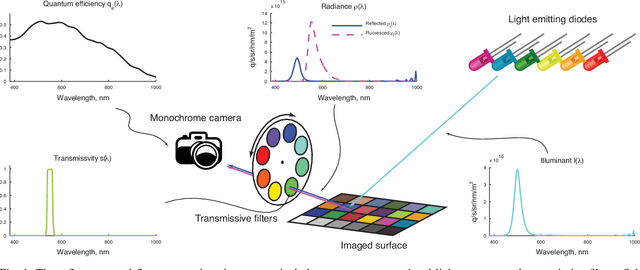
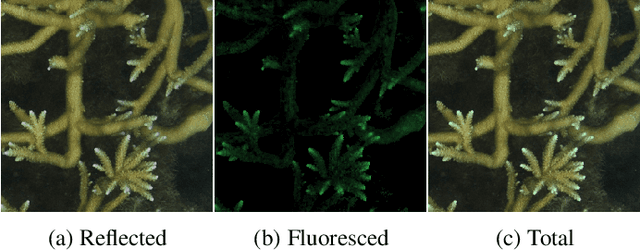
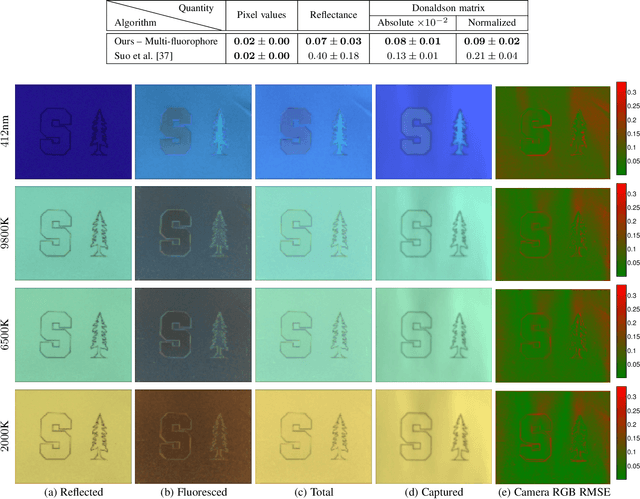
There is widespread interest in estimating the fluorescence properties of natural materials in an image. However, the separation between reflected and fluoresced components is difficult, because it is impossible to distinguish reflected and fluoresced photons without controlling the illuminant spectrum. We show how to jointly estimate the reflectance and fluorescence from a single set of images acquired under multiple illuminants. We present a framework based on a linear approximation to the physical equations describing image formation in terms of surface spectral reflectance and fluorescence due to multiple fluorophores. We relax the non-convex, inverse estimation problem in order to jointly estimate the reflectance and fluorescence properties in a single optimization step and we use the Alternating Direction Method of Multipliers (ADMM) approach to efficiently find a solution. We provide a software implementation of the solver for our method and prior methods. We evaluate the accuracy and reliability of the method using both simulations and experimental data. To acquire data to test the methods, we built a custom imaging system using a monochrome camera, a filter wheel with bandpass transmissive filters and a small number of light emitting diodes. We compared the system and algorithm performance with the ground truth as well as with prior methods. Our approach produces lower errors compared to earlier algorithms.