 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Network Generalization: The impact of camera parameters
Dec 08, 2019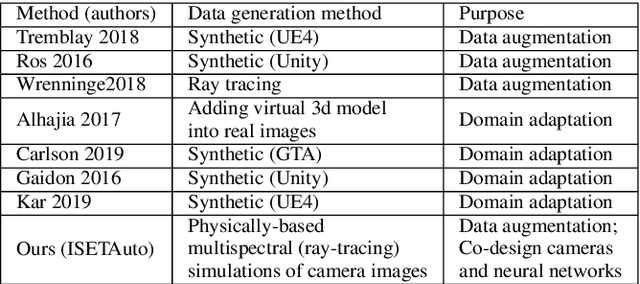
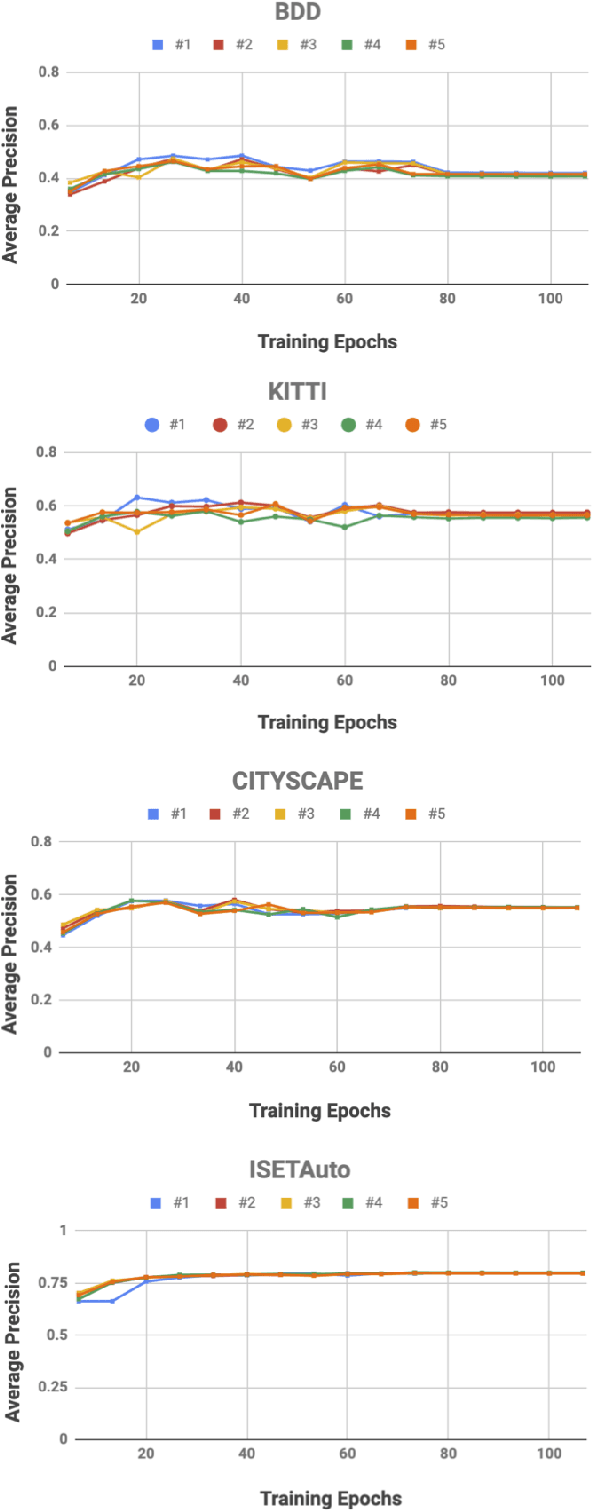
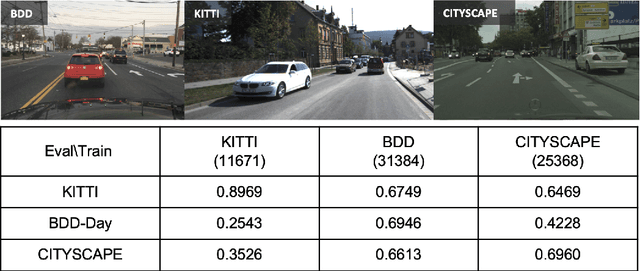
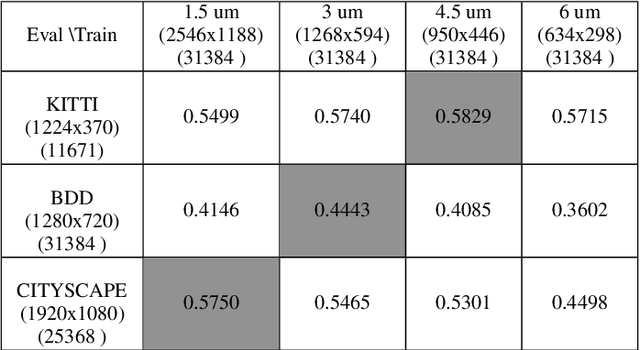
We quantify the generalization of a convolutional neural network (CNN) trained to identify cars. First, we perform a series of experiments to train the network using one image dataset - either synthetic or from a camera - and then test on a different image dataset. We show that generalization between images obtained with different cameras is roughly the same as generalization between images from a camera and ray-traced multispectral synthetic images. Second, we use ISETAuto, a soft prototyping tool that creates ray-traced multispectral simulations of camera images, to simulate sensor images with a range of pixel sizes, color filters, acquisition and post-acquisition processing. These experiments reveal how variations in specific camera parameters and image processing operations impact CNN generalization. We find that (a) pixel size impacts generalization, (b) demosaicking substantially impacts performance and generalization for shallow (8-bit) bit-depths but not deeper ones (10-bit), and (c) the network performs well using raw (not demosaicked) sensor data for 10-bit pixels.
Soft Prototyping Camera Designs for Car Detection Based on a Convolutional Neural Network
Oct 24, 2019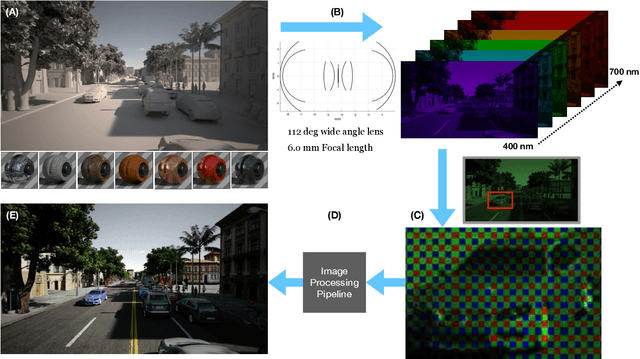
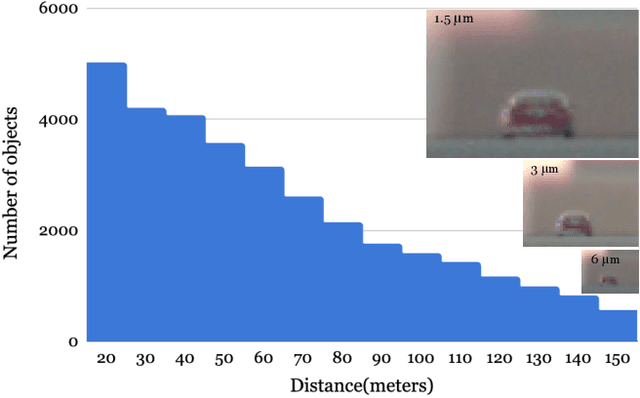
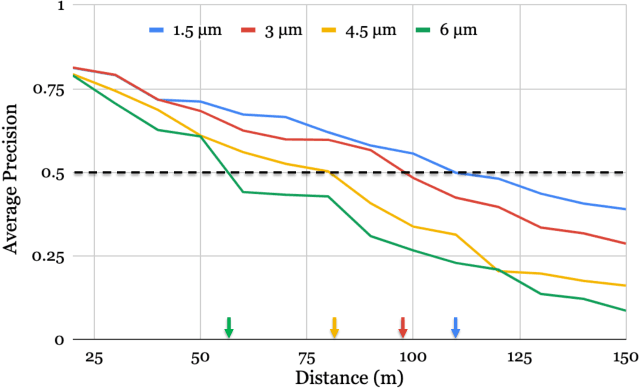
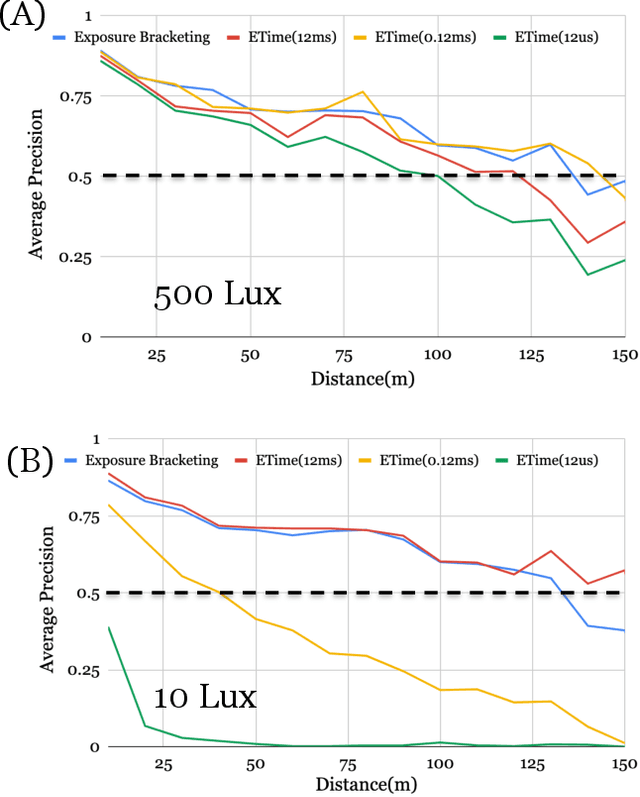
Imaging systems are increasingly used as input to convolutional neural networks (CNN) for object detection; we would like to design cameras that are optimized for this purpose. It is impractical to build different cameras and then acquire and label the necessary data for every potential camera design; creating software simulations of the camera in context (soft prototyping) is the only realistic approach. We implemented soft-prototyping tools that can quantitatively simulate image radiance and camera designs to create realistic images that are input to a convolutional neural network for car detection. We used these methods to quantify the effect that critical hardware components (pixel size), sensor control (exposure algorithms) and image processing (gamma and demosaicing algorithms) have upon average precision of car detection. We quantify (a) the relationship between pixel size and the ability to detect cars at different distances, (b) the penalty for choosing a poor exposure duration, and (c) the ability of the CNN to perform car detection for a variety of post-acquisition processing algorithms. These results show that the optimal choices for car detection are not constrained by the same metrics used for image quality in consumer photography. It is better to evaluate camera designs for CNN applications using soft prototyping with task-specific metrics rather than consumer photography metrics.
A system for generating complex physically accurate sensor images for automotive applications
Feb 12, 2019

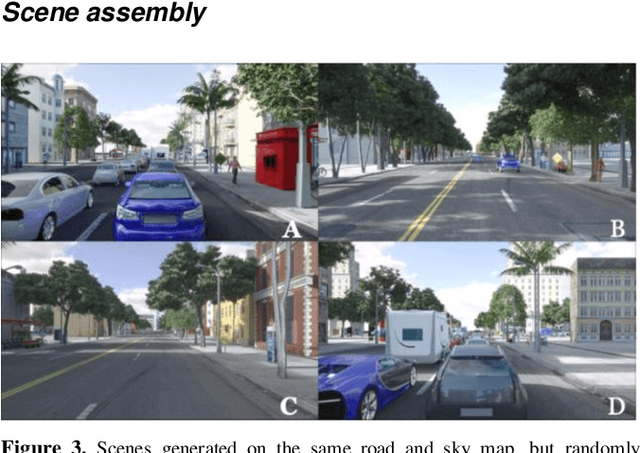
We describe an open-source simulator that creates sensor irradiance and sensor images of typical automotive scenes in urban settings. The purpose of the system is to support camera design and testing for automotive applications. The user can specify scene parameters (e.g., scene type, road type, traffic density, time of day) to assemble a large number of random scenes from graphics assets stored in a database. The sensor irradiance is generated using quantitative computer graphics methods, and the sensor images are created using image systems sensor simulation. The synthetic sensor images have pixel level annotations; hence, they can be used to train and evaluate neural networks for imaging tasks, such as object detection and classification. The end-to-end simulation system supports quantitative assessment, from scene to camera to network accuracy, for automotive applications.