 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLeveraging AI Agents for Autonomous Networks: A Reference Architecture and Empirical Studies
Sep 10, 2025The evolution toward Level 4 (L4) Autonomous Networks (AN) represents a strategic inflection point in telecommunications, where networks must transcend reactive automation to achieve genuine cognitive capabilities--fulfilling TM Forum's vision of self-configuring, self-healing, and self-optimizing systems that deliver zero-wait, zero-touch, and zero-fault services. This work bridges the gap between architectural theory and operational reality by implementing Joseph Sifakis's AN Agent reference architecture in a functional cognitive system, deploying coordinated proactive-reactive runtimes driven by hybrid knowledge representation. Through an empirical case study of a Radio Access Network (RAN) Link Adaptation (LA) Agent, we validate this framework's transformative potential: demonstrating sub-10 ms real-time control in 5G NR sub-6 GHz while achieving 6% higher downlink throughput than Outer Loop Link Adaptation (OLLA) algorithms and 67% Block Error Rate (BLER) reduction for ultra-reliable services through dynamic Modulation and Coding Scheme (MCS) optimization. These improvements confirm the architecture's viability in overcoming traditional autonomy barriers and advancing critical L4-enabling capabilities toward next-generation objectives.
World Models: The Safety Perspective
Nov 12, 2024With the proliferation of the Large Language Model (LLM), the concept of World Models (WM) has recently attracted a great deal of attention in the AI research community, especially in the context of AI agents. It is arguably evolving into an essential foundation for building AI agent systems. A WM is intended to help the agent predict the future evolution of environmental states or help the agent fill in missing information so that it can plan its actions and behave safely. The safety property of WM plays a key role in their effective use in critical applications. In this work, we review and analyze the impacts of the current state-of-the-art in WM technology from the point of view of trustworthiness and safety based on a comprehensive survey and the fields of application envisaged. We provide an in-depth analysis of state-of-the-art WMs and derive technical research challenges and their impact in order to call on the research community to collaborate on improving the safety and trustworthiness of WM.
Testing System Intelligence
May 19, 2023



We discuss the adequacy of tests for intelligent systems and practical problems raised by their implementation. We propose the replacement test as the ability of a system to replace successfully another system performing a task in a given context. We show how it can characterize salient aspects of human intelligence that cannot be taken into account by the Turing test. We argue that building intelligent systems passing the replacement test involves a series of technical problems that are outside the scope of current AI. We present a framework for implementing the proposed test and validating the properties of the intelligent systems. We discuss the inherent limitations of intelligent system validation and advocate new theoretical foundations for extending existing rigorous test methods. We suggest that the replacement test, based on the complementarity of skills between human and machine, can lead to a multitude of intelligence concepts reflecting the ability to combine data-based and symbolic knowledge to varying degrees.
Runtime Safety Assurance for Learning-enabled Control of Autonomous Driving Vehicles
Sep 28, 2021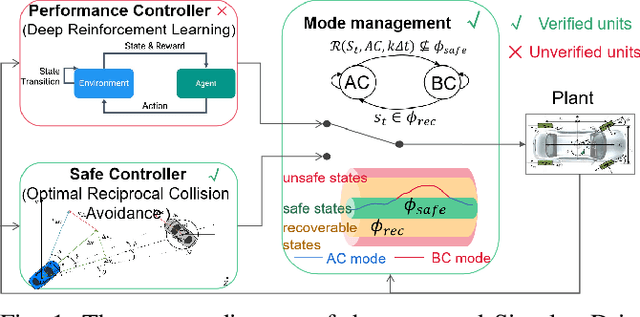
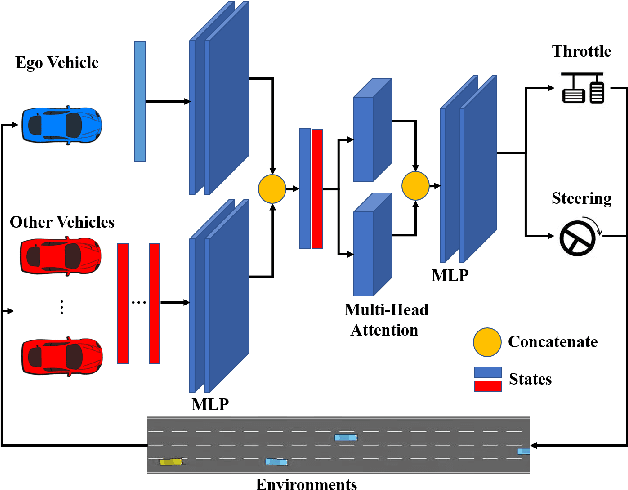

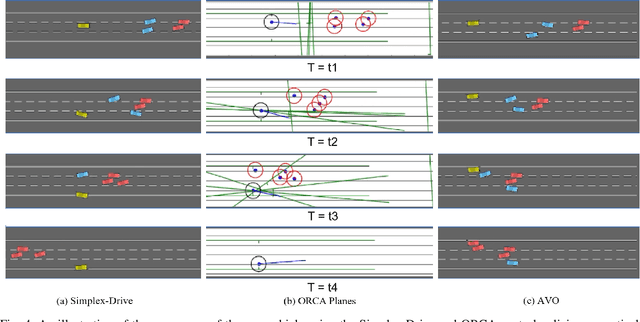
Providing safety guarantees for Autonomous Vehicle (AV) systems with machine-learning-based controllers remains a challenging issue. In this work, we propose Simplex-Drive, a framework that can achieve runtime safety assurance for machine-learning enabled controllers of AVs. The proposed Simplex-Drive consists of an unverified Deep Reinforcement Learning (DRL)-based advanced controller (AC) that achieves desirable performance in complex scenarios, a Velocity-Obstacle (VO) based baseline safe controller (BC) with provably safety guarantees, and a verified mode management unit that monitors the operation status and switches the control authority between AC and BC based on safety-related conditions. We provide a formal correctness proof of Simplex-Drive and conduct a lane-changing case study in dense traffic scenarios. The simulation experiment results demonstrate that Simplex-Drive can always ensure operation safety without sacrificing control performance, even if the DRL policy may lead to deviations from the safe status.
A hybrid controller for safe and efficient collision avoidance control
Mar 29, 2021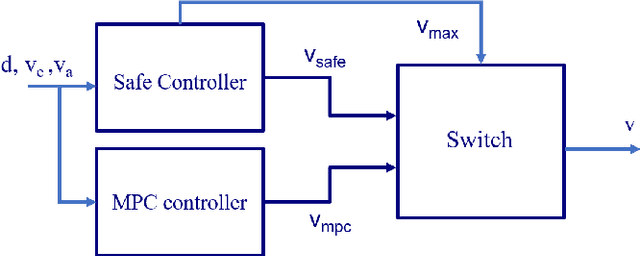
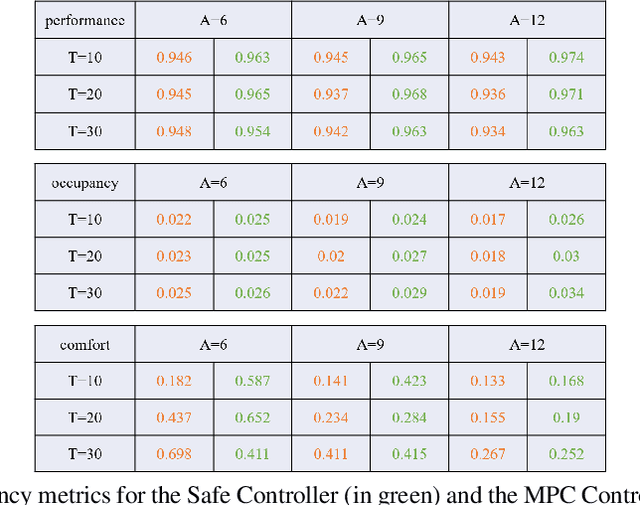
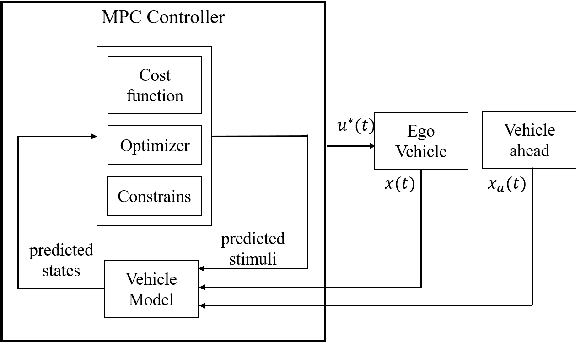
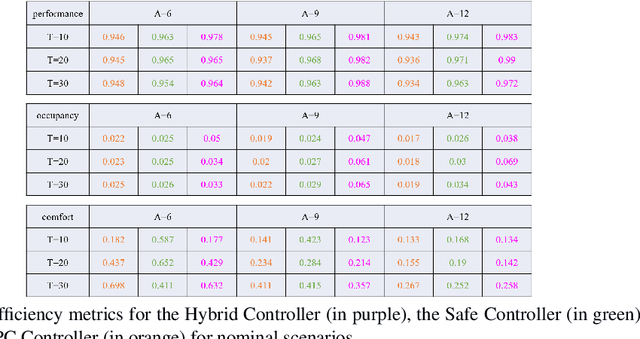
We design and experimentally evaluate a hybrid safe-by-construction collision avoidance controller for autonomous vehicles. The controller combines into a single architecture the respective advantages of an adaptive controller and a discrete safe controller. The adaptive controller relies on model predictive control to achieve optimal efficiency in nominal conditions. The safe controller avoids collision by applying two different policies, for nominal and out-of-nominal conditions, respectively. We present design principles for both the adaptive and the safe controller and show how each one can contribute in the hybrid architecture to improve performance, road occupancy and passenger comfort while preserving safety. The experimental results confirm the feasibility of the approach and the practical relevance of hybrid controllers for safe and efficient driving.