 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRuntime Safety Assurance for Learning-enabled Control of Autonomous Driving Vehicles
Sep 28, 2021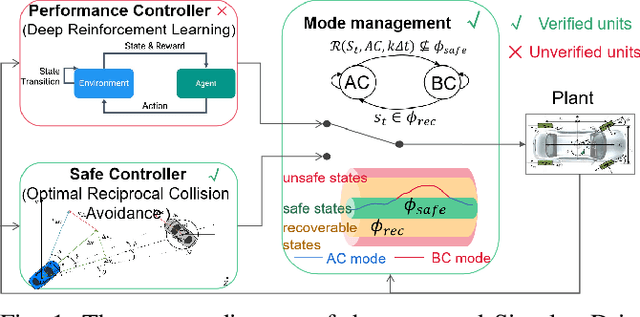

Providing safety guarantees for Autonomous Vehicle (AV) systems with machine-learning-based controllers remains a challenging issue. In this work, we propose Simplex-Drive, a framework that can achieve runtime safety assurance for machine-learning enabled controllers of AVs. The proposed Simplex-Drive consists of an unverified Deep Reinforcement Learning (DRL)-based advanced controller (AC) that achieves desirable performance in complex scenarios, a Velocity-Obstacle (VO) based baseline safe controller (BC) with provably safety guarantees, and a verified mode management unit that monitors the operation status and switches the control authority between AC and BC based on safety-related conditions. We provide a formal correctness proof of Simplex-Drive and conduct a lane-changing case study in dense traffic scenarios. The simulation experiment results demonstrate that Simplex-Drive can always ensure operation safety without sacrificing control performance, even if the DRL policy may lead to deviations from the safe status.