 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Decentralized Multi-task Multi-Agent Reinforcement Learning under Partial Observability
Jul 13, 2017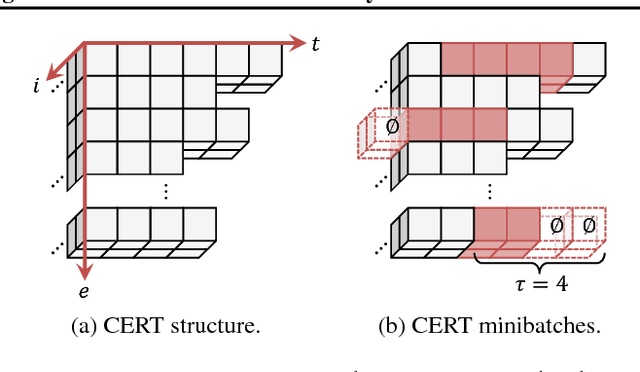
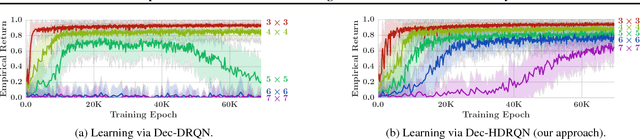
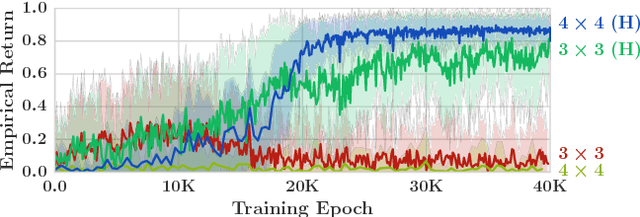
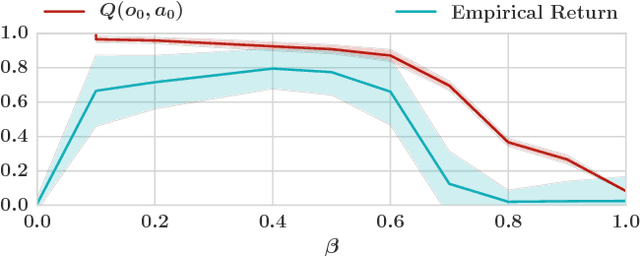
Many real-world tasks involve multiple agents with partial observability and limited communication. Learning is challenging in these settings due to local viewpoints of agents, which perceive the world as non-stationary due to concurrently-exploring teammates. Approaches that learn specialized policies for individual tasks face problems when applied to the real world: not only do agents have to learn and store distinct policies for each task, but in practice identities of tasks are often non-observable, making these approaches inapplicable. This paper formalizes and addresses the problem of multi-task multi-agent reinforcement learning under partial observability. We introduce a decentralized single-task learning approach that is robust to concurrent interactions of teammates, and present an approach for distilling single-task policies into a unified policy that performs well across multiple related tasks, without explicit provision of task identity.
* Accepted to ICML 2017
Scalable Accelerated Decentralized Multi-Robot Policy Search in Continuous Observation Spaces
Mar 16, 2017
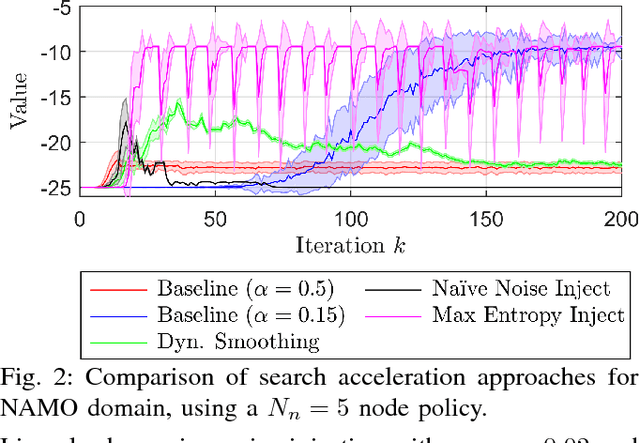

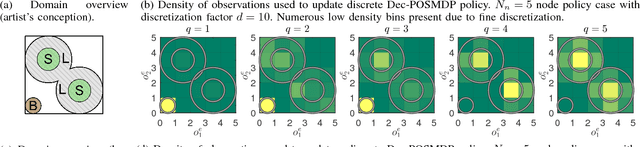
This paper presents the first ever approach for solving \emph{continuous-observation} Decentralized Partially Observable Markov Decision Processes (Dec-POMDPs) and their semi-Markovian counterparts, Dec-POSMDPs. This contribution is especially important in robotics, where a vast number of sensors provide continuous observation data. A continuous-observation policy representation is introduced using Stochastic Kernel-based Finite State Automata (SK-FSAs). An SK-FSA search algorithm titled Entropy-based Policy Search using Continuous Kernel Observations (EPSCKO) is introduced and applied to the first ever continuous-observation Dec-POMDP/Dec-POSMDP domain, where it significantly outperforms state-of-the-art discrete approaches. This methodology is equally applicable to Dec-POMDPs and Dec-POSMDPs, though the empirical analysis presented focuses on Dec-POSMDPs due to their higher scalability. To improve convergence, an entropy injection policy search acceleration approach for both continuous and discrete observation cases is also developed and shown to improve convergence rates without degrading policy quality.
Semantic-level Decentralized Multi-Robot Decision-Making using Probabilistic Macro-Observations
Mar 16, 2017
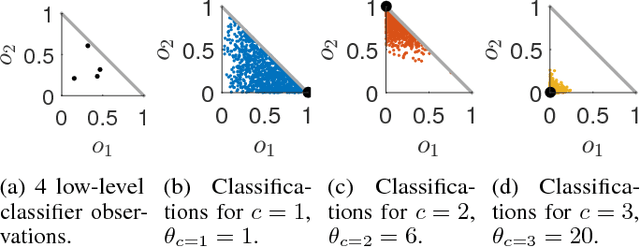
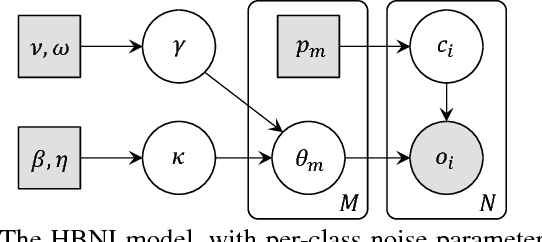
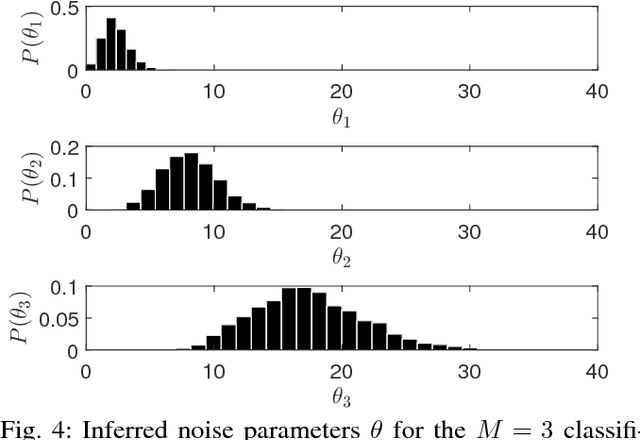
Robust environment perception is essential for decision-making on robots operating in complex domains. Intelligent task execution requires principled treatment of uncertainty sources in a robot's observation model. This is important not only for low-level observations (e.g., accelerometer data), but also for high-level observations such as semantic object labels. This paper formalizes the concept of macro-observations in Decentralized Partially Observable Semi-Markov Decision Processes (Dec-POSMDPs), allowing scalable semantic-level multi-robot decision making. A hierarchical Bayesian approach is used to model noise statistics of low-level classifier outputs, while simultaneously allowing sharing of domain noise characteristics between classes. Classification accuracy of the proposed macro-observation scheme, called Hierarchical Bayesian Noise Inference (HBNI), is shown to exceed existing methods. The macro-observation scheme is then integrated into a Dec-POSMDP planner, with hardware experiments running onboard a team of dynamic quadrotors in a challenging domain where noise-agnostic filtering fails. To the best of our knowledge, this is the first demonstration of a real-time, convolutional neural net-based classification framework running fully onboard a team of quadrotors in a multi-robot decision-making domain.
Hierarchical Bayesian Noise Inference for Robust Real-time Probabilistic Object Classification
Jul 14, 2016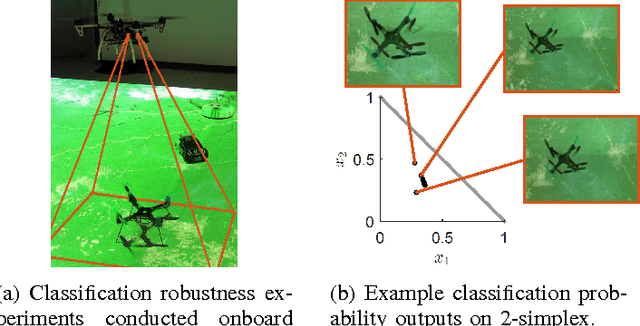

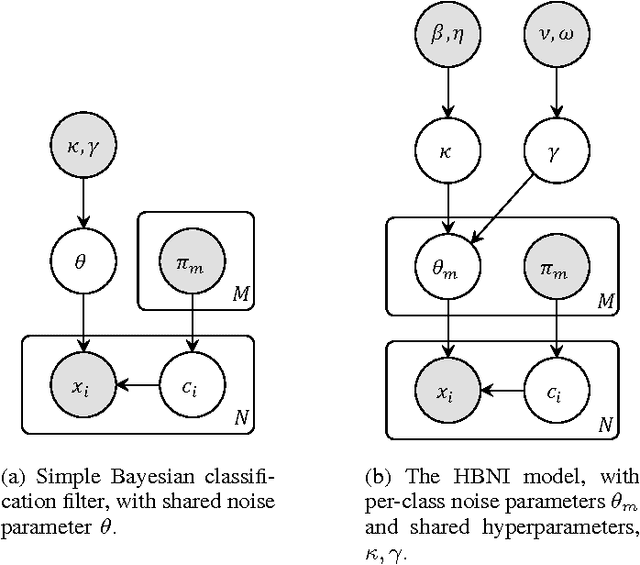

Robust environment perception is essential for decision-making on robots operating in complex domains. Principled treatment of uncertainty sources in a robot's observation model is necessary for accurate mapping and object detection. This is important not only for low-level observations (e.g., accelerometer data), but for high-level observations such as semantic object labels as well. This paper presents an approach for filtering sequences of object classification probabilities using online modeling of the noise characteristics of the classifier outputs. A hierarchical Bayesian approach is used to model per-class noise distributions, while simultaneously allowing sharing of high-level noise characteristics between classes. The proposed filtering scheme, called Hierarchical Bayesian Noise Inference (HBNI), is shown to outperform classification accuracy of existing methods. The paper also presents real-time filtered classification hardware experiments running fully onboard a moving quadrotor, where the proposed approach is demonstrated to work in a challenging domain where noise-agnostic filtering fails.