 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAsynchronous Tool Usage for Real-Time Agents
Oct 28, 2024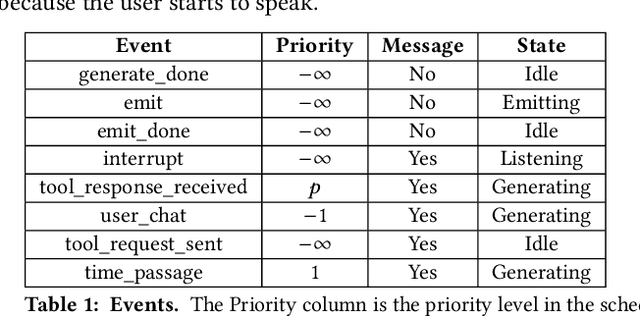


While frontier large language models (LLMs) are capable tool-using agents, current AI systems still operate in a strict turn-based fashion, oblivious to passage of time. This synchronous design forces user queries and tool-use to occur sequentially, preventing the systems from multitasking and reducing interactivity. To address this limitation, we introduce asynchronous AI agents capable of parallel processing and real-time tool-use. Our key contribution is an event-driven finite-state machine architecture for agent execution and prompting, integrated with automatic speech recognition and text-to-speech. Drawing inspiration from the concepts originally developed for real-time operating systems, this work presents both a conceptual framework and practical tools for creating AI agents capable of fluid, multitasking interactions.
RoboTurk: A Crowdsourcing Platform for Robotic Skill Learning through Imitation
Nov 07, 2018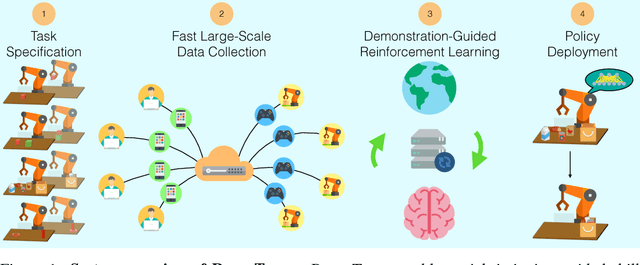

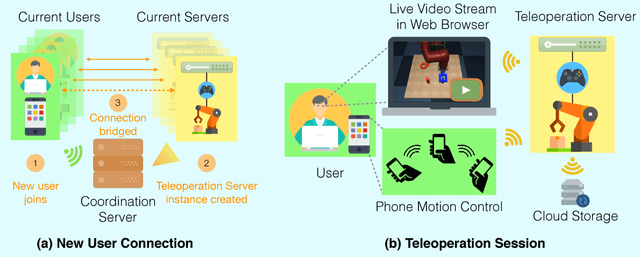
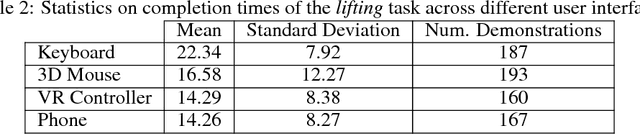
Imitation Learning has empowered recent advances in learning robotic manipulation tasks by addressing shortcomings of Reinforcement Learning such as exploration and reward specification. However, research in this area has been limited to modest-sized datasets due to the difficulty of collecting large quantities of task demonstrations through existing mechanisms. This work introduces RoboTurk to address this challenge. RoboTurk is a crowdsourcing platform for high quality 6-DoF trajectory based teleoperation through the use of widely available mobile devices (e.g. iPhone). We evaluate RoboTurk on three manipulation tasks of varying timescales (15-120s) and observe that our user interface is statistically similar to special purpose hardware such as virtual reality controllers in terms of task completion times. Furthermore, we observe that poor network conditions, such as low bandwidth and high delay links, do not substantially affect the remote users' ability to perform task demonstrations successfully on RoboTurk. Lastly, we demonstrate the efficacy of RoboTurk through the collection of a pilot dataset; using RoboTurk, we collected 137.5 hours of manipulation data from remote workers, amounting to over 2200 successful task demonstrations in 22 hours of total system usage. We show that the data obtained through RoboTurk enables policy learning on multi-step manipulation tasks with sparse rewards and that using larger quantities of demonstrations during policy learning provides benefits in terms of both learning consistency and final performance. For additional results, videos, and to download our pilot dataset, visit $\href{http://roboturk.stanford.edu/}{\texttt{roboturk.stanford.edu}}$
NoScope: Optimizing Neural Network Queries over Video at Scale
Aug 08, 2017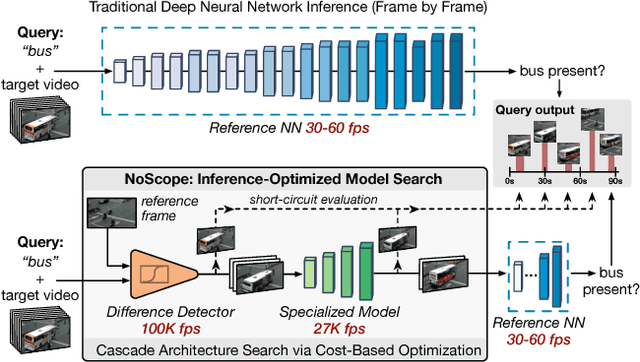
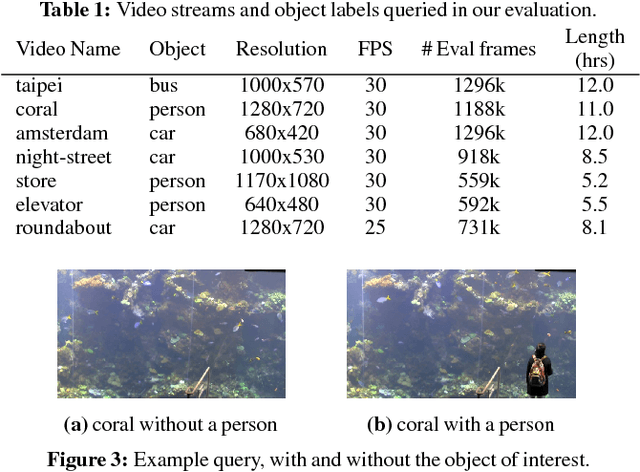
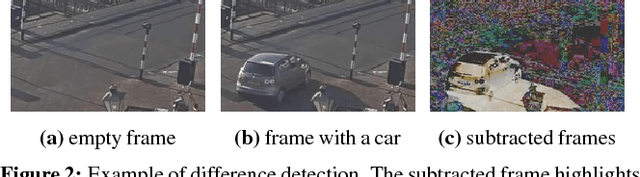
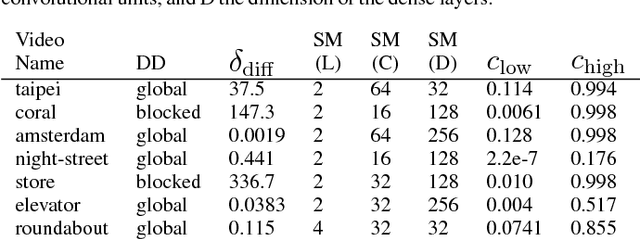
Recent advances in computer vision-in the form of deep neural networks-have made it possible to query increasing volumes of video data with high accuracy. However, neural network inference is computationally expensive at scale: applying a state-of-the-art object detector in real time (i.e., 30+ frames per second) to a single video requires a $4000 GPU. In response, we present NoScope, a system for querying videos that can reduce the cost of neural network video analysis by up to three orders of magnitude via inference-optimized model search. Given a target video, object to detect, and reference neural network, NoScope automatically searches for and trains a sequence, or cascade, of models that preserves the accuracy of the reference network but is specialized to the target video and are therefore far less computationally expensive. NoScope cascades two types of models: specialized models that forego the full generality of the reference model but faithfully mimic its behavior for the target video and object; and difference detectors that highlight temporal differences across frames. We show that the optimal cascade architecture differs across videos and objects, so NoScope uses an efficient cost-based optimizer to search across models and cascades. With this approach, NoScope achieves two to three order of magnitude speed-ups (265-15,500x real-time) on binary classification tasks over fixed-angle webcam and surveillance video while maintaining accuracy within 1-5% of state-of-the-art neural networks.
Automated Assignment of Backbone NMR Data using Artificial Intelligence
Jun 18, 2015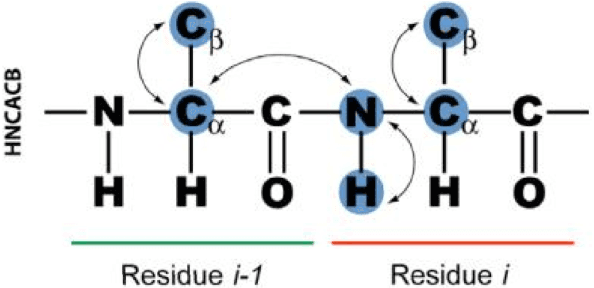
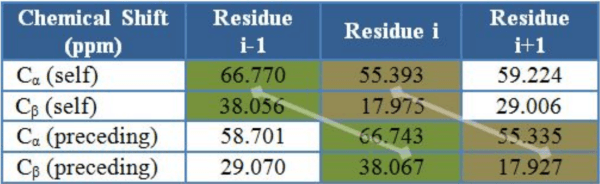
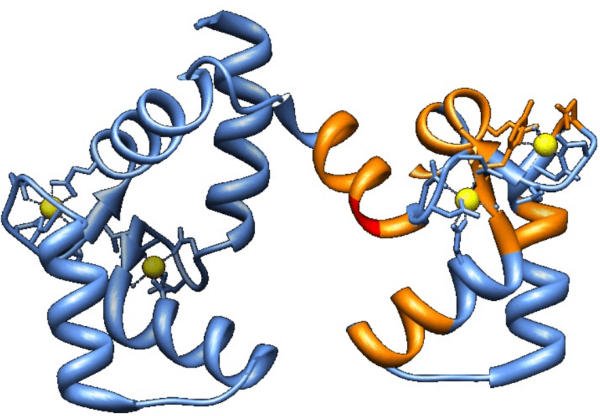
Nuclear magnetic resonance (NMR) spectroscopy is a powerful method for the investigation of three-dimensional structures of biological molecules such as proteins. Determining a protein structure is essential for understanding its function and alterations in function which lead to disease. One of the major challenges of the post-genomic era is to obtain structural and functional information on the many unknown proteins encoded by thousands of newly identified genes. The goal of this research is to design an algorithm capable of automating the analysis of backbone protein NMR data by implementing AI strategies such as greedy and A* search.