 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDAMAGE: Detecting Adversarially Modified AI Generated Text
Jan 06, 2025AI humanizers are a new class of online software tools meant to paraphrase and rewrite AI-generated text in a way that allows them to evade AI detection software. We study 19 AI humanizer and paraphrasing tools and qualitatively assess their effects and faithfulness in preserving the meaning of the original text. We show that many existing AI detectors fail to detect humanized text. Finally, we demonstrate a robust model that can detect humanized AI text while maintaining a low false positive rate using a data-centric augmentation approach. We attack our own detector, training our own fine-tuned model optimized against our detector's predictions, and show that our detector's cross-humanizer generalization is sufficient to remain robust to this attack.
Technical Report on the Checkfor.ai AI-Generated Text Classifier
Feb 26, 2024



We present the CheckforAI text classifier, a transformer-based neural network trained to distinguish text written by large language models from text written by humans. CheckforAI outperforms zero-shot methods such as DetectGPT as well as leading commercial AI detection tools with over 9 times lower error rates on a comprehensive benchmark comprised of ten text domains (student writing, creative writing, scientific writing, books, encyclopedias, news, email, scientific papers, short-form Q&A) and 8 open- and closed-source large language models. We propose a training algorithm, hard negative mining with synthetic mirrors, that enables our classifier to achieve orders of magnitude lower false positive rates on high-data domains such as reviews. Finally, we show that CheckforAI is not biased against nonnative English speakers and generalizes to domains and models unseen during training.
Scaling Robot Supervision to Hundreds of Hours with RoboTurk: Robotic Manipulation Dataset through Human Reasoning and Dexterity
Nov 11, 2019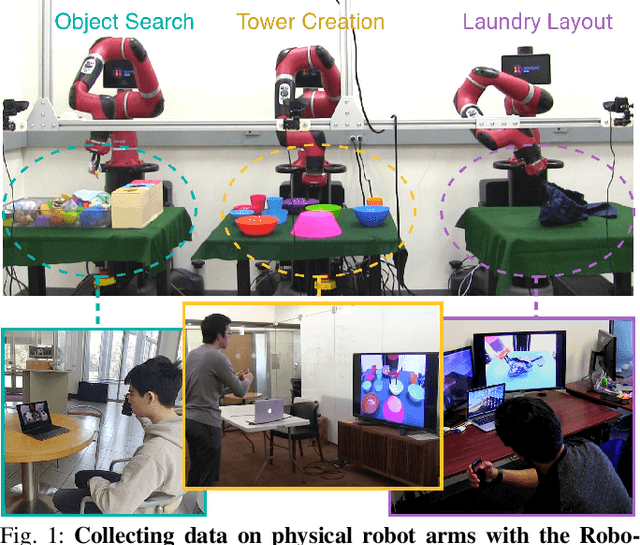
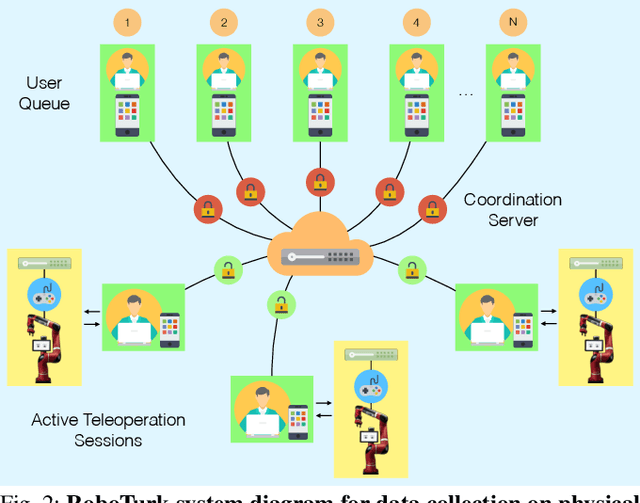
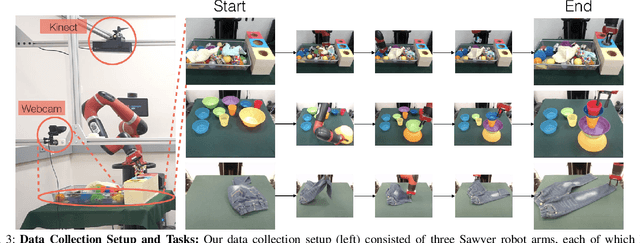
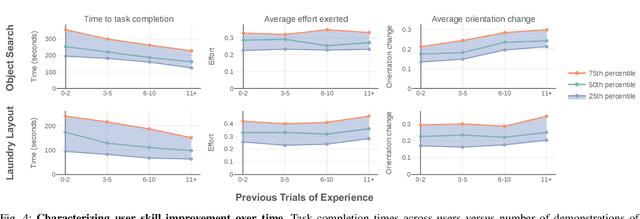
Large, richly annotated datasets have accelerated progress in fields such as computer vision and natural language processing, but replicating these successes in robotics has been challenging. While prior data collection methodologies such as self-supervision have resulted in large datasets, the data can have poor signal-to-noise ratio. By contrast, previous efforts to collect task demonstrations with humans provide better quality data, but they cannot reach the same data magnitude. Furthermore, neither approach places guarantees on the diversity of the data collected, in terms of solution strategies. In this work, we leverage and extend the RoboTurk platform to scale up data collection for robotic manipulation using remote teleoperation. The primary motivation for our platform is two-fold: (1) to address the shortcomings of prior work and increase the total quantity of manipulation data collected through human supervision by an order of magnitude without sacrificing the quality of the data and (2) to collect data on challenging manipulation tasks across several operators and observe a diverse set of emergent behaviors and solutions. We collected over 111 hours of robot manipulation data across 54 users and 3 challenging manipulation tasks in 1 week, resulting in the largest robot dataset collected via remote teleoperation. We evaluate the quality of our platform, the diversity of demonstrations in our dataset, and the utility of our dataset via quantitative and qualitative analysis. For additional results, supplementary videos, and to download our dataset, visit http://roboturk.stanford.edu/realrobotdataset .
RoboTurk: A Crowdsourcing Platform for Robotic Skill Learning through Imitation
Nov 07, 2018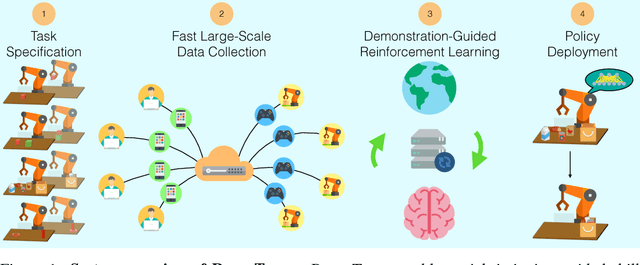

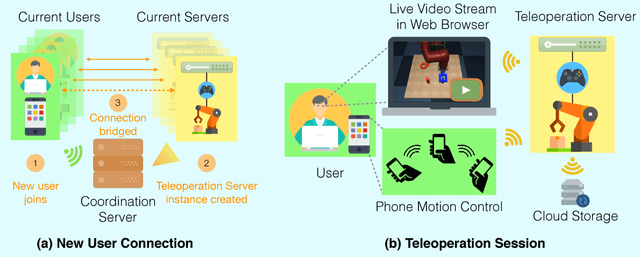
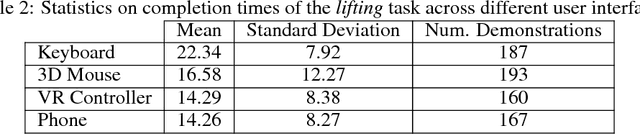
Imitation Learning has empowered recent advances in learning robotic manipulation tasks by addressing shortcomings of Reinforcement Learning such as exploration and reward specification. However, research in this area has been limited to modest-sized datasets due to the difficulty of collecting large quantities of task demonstrations through existing mechanisms. This work introduces RoboTurk to address this challenge. RoboTurk is a crowdsourcing platform for high quality 6-DoF trajectory based teleoperation through the use of widely available mobile devices (e.g. iPhone). We evaluate RoboTurk on three manipulation tasks of varying timescales (15-120s) and observe that our user interface is statistically similar to special purpose hardware such as virtual reality controllers in terms of task completion times. Furthermore, we observe that poor network conditions, such as low bandwidth and high delay links, do not substantially affect the remote users' ability to perform task demonstrations successfully on RoboTurk. Lastly, we demonstrate the efficacy of RoboTurk through the collection of a pilot dataset; using RoboTurk, we collected 137.5 hours of manipulation data from remote workers, amounting to over 2200 successful task demonstrations in 22 hours of total system usage. We show that the data obtained through RoboTurk enables policy learning on multi-step manipulation tasks with sparse rewards and that using larger quantities of demonstrations during policy learning provides benefits in terms of both learning consistency and final performance. For additional results, videos, and to download our pilot dataset, visit $\href{http://roboturk.stanford.edu/}{\texttt{roboturk.stanford.edu}}$