 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edgexbench: Tracking Agents Productivity Scaling with Profession-Aligned Real-World Evaluations
Jun 16, 2025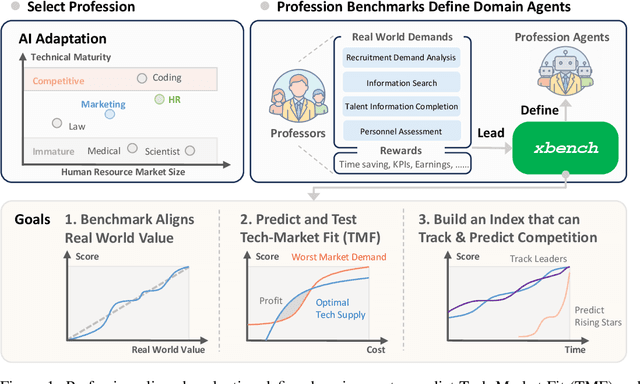
We introduce xbench, a dynamic, profession-aligned evaluation suite designed to bridge the gap between AI agent capabilities and real-world productivity. While existing benchmarks often focus on isolated technical skills, they may not accurately reflect the economic value agents deliver in professional settings. To address this, xbench targets commercially significant domains with evaluation tasks defined by industry professionals. Our framework creates metrics that strongly correlate with productivity value, enables prediction of Technology-Market Fit (TMF), and facilitates tracking of product capabilities over time. As our initial implementations, we present two benchmarks: Recruitment and Marketing. For Recruitment, we collect 50 tasks from real-world headhunting business scenarios to evaluate agents' abilities in company mapping, information retrieval, and talent sourcing. For Marketing, we assess agents' ability to match influencers with advertiser needs, evaluating their performance across 50 advertiser requirements using a curated pool of 836 candidate influencers. We present initial evaluation results for leading contemporary agents, establishing a baseline for these professional domains. Our continuously updated evalsets and evaluations are available at https://xbench.org.
Incorporating Target Vehicle Trajectories Predicted by Deep Learning Into Model Predictive Controlled Vehicles
Oct 04, 2023Model Predictive Control (MPC) has been widely applied to the motion planning of autonomous vehicles. An MPC-controlled vehicle is required to predict its own trajectories in a finite prediction horizon according to its model. Beyond this, the vehicle should also incorporate the prediction of the trajectory of its nearby vehicles, or target vehicles (TVs) into its decision-making. The conventional trajectory prediction methods, such as the constant-speed-based ones, are too trivial to accurately capture the potential collision risks. In this report, we propose a novel MPC-based motion planning method for an autonomous vehicle with a set of risk-aware constraints. These constraints incorporate the predicted trajectory of a TV learned using a deep-learning-based method. A recurrent neural network (RNN) is used to predict the TV's future trajectory based on its historical data. Then, the predicted TV trajectory is incorporated into the optimization of the MPC of the ego vehicle to generate collision-free motion. Simulation studies are conducted to showcase the prediction accuracy of the RNN model and the collision-free trajectories generated by the MPC.
Low power communication signal enhancement method of Internet of things based on nonlocal mean denoising
May 14, 2022
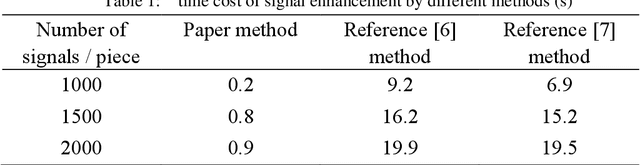

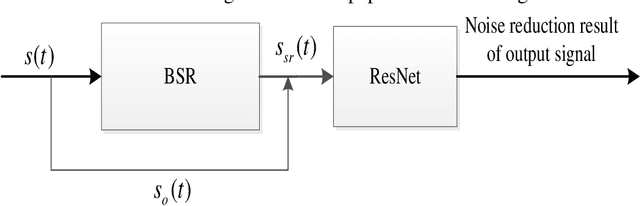
In order to improve the transmission effect of low-power communication signal of Internet of things and compress the enhancement time of low-power communication signal, this paper designs a low-power communication signal enhancement method of Internet of things based on nonlocal mean denoising. Firstly, the residual of one-dimensional communication layer is pre processed by convolution core to obtain the residual of one-dimensional communication layer; Then, according to the two classification recognition method, the noise reduction signal feature recognition of the low-power communication signal of the Internet of things is realized, the non local mean noise reduction algorithm is used to remove the low-power communication signal of the Internet of things, and the weight value between similar blocks is calculated according to the European distance method. Finally, the low-power communication signal enhancement of the Internet of things is realized by the non local mean value denoising method. The experimental results show that the communication signal enhancement time overhead of this method is low, which is always less than 2.6s. The lowest bit error rate after signal enhancement is about 1%, and the signal-to-noise ratio is up to 18 dB, which shows that this method can achieve signal enhancement.