 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Coarse-to-Fine Learning for Oriented Tiny Object Detection
Apr 18, 2023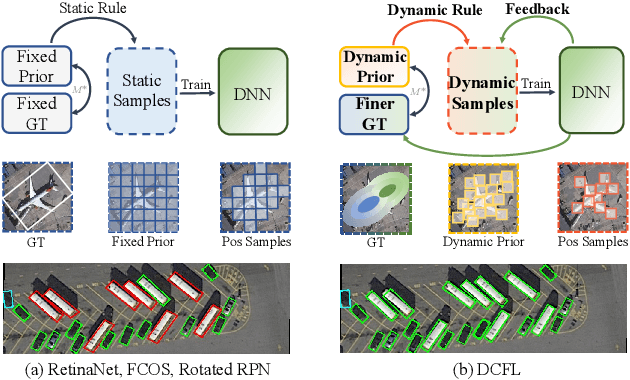
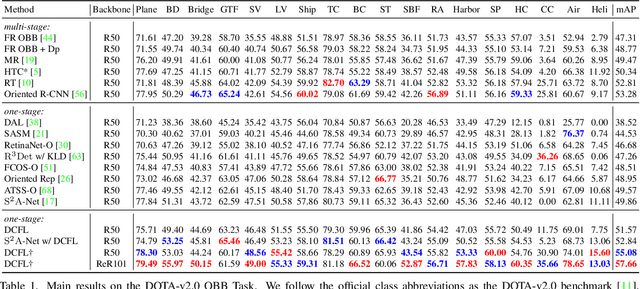
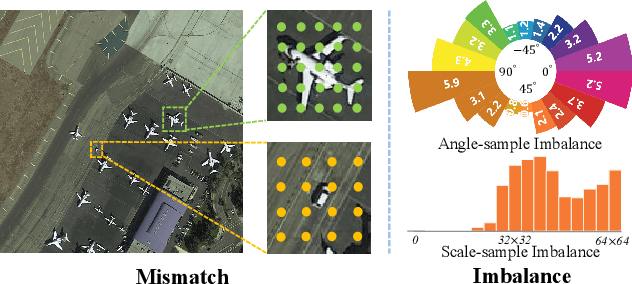
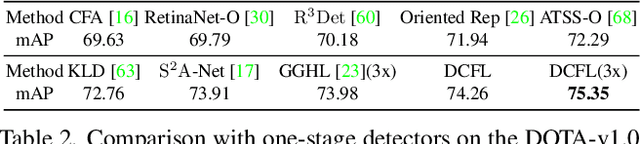
Detecting arbitrarily oriented tiny objects poses intense challenges to existing detectors, especially for label assignment. Despite the exploration of adaptive label assignment in recent oriented object detectors, the extreme geometry shape and limited feature of oriented tiny objects still induce severe mismatch and imbalance issues. Specifically, the position prior, positive sample feature, and instance are mismatched, and the learning of extreme-shaped objects is biased and unbalanced due to little proper feature supervision. To tackle these issues, we propose a dynamic prior along with the coarse-to-fine assigner, dubbed DCFL. For one thing, we model the prior, label assignment, and object representation all in a dynamic manner to alleviate the mismatch issue. For another, we leverage the coarse prior matching and finer posterior constraint to dynamically assign labels, providing appropriate and relatively balanced supervision for diverse instances. Extensive experiments on six datasets show substantial improvements to the baseline. Notably, we obtain the state-of-the-art performance for one-stage detectors on the DOTA-v1.5, DOTA-v2.0, and DIOR-R datasets under single-scale training and testing. Codes are available at https://github.com/Chasel-Tsui/mmrotate-dcfl.
RFLA: Gaussian Receptive Field based Label Assignment for Tiny Object Detection
Aug 18, 2022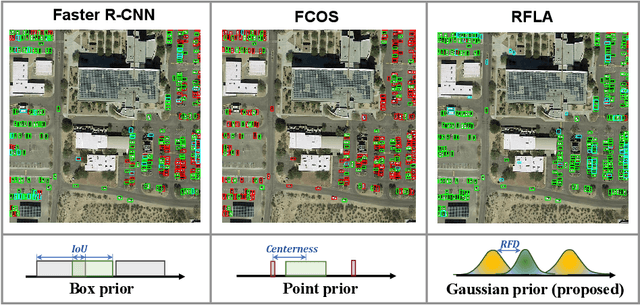

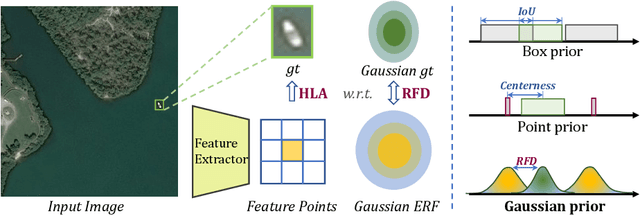
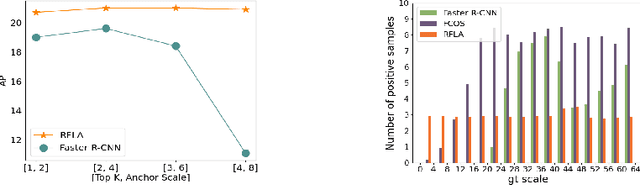
Detecting tiny objects is one of the main obstacles hindering the development of object detection. The performance of generic object detectors tends to drastically deteriorate on tiny object detection tasks. In this paper, we point out that either box prior in the anchor-based detector or point prior in the anchor-free detector is sub-optimal for tiny objects. Our key observation is that the current anchor-based or anchor-free label assignment paradigms will incur many outlier tiny-sized ground truth samples, leading to detectors imposing less focus on the tiny objects. To this end, we propose a Gaussian Receptive Field based Label Assignment (RFLA) strategy for tiny object detection. Specifically, RFLA first utilizes the prior information that the feature receptive field follows Gaussian distribution. Then, instead of assigning samples with IoU or center sampling strategy, a new Receptive Field Distance (RFD) is proposed to directly measure the similarity between the Gaussian receptive field and ground truth. Considering that the IoU-threshold based and center sampling strategy are skewed to large objects, we further design a Hierarchical Label Assignment (HLA) module based on RFD to achieve balanced learning for tiny objects. Extensive experiments on four datasets demonstrate the effectiveness of the proposed methods. Especially, our approach outperforms the state-of-the-art competitors with 4.0 AP points on the AI-TOD dataset. Codes are available at https://github.com/Chasel-Tsui/mmdet-rfla
Detecting tiny objects in aerial images: A normalized Wasserstein distance and a new benchmark
Jun 28, 2022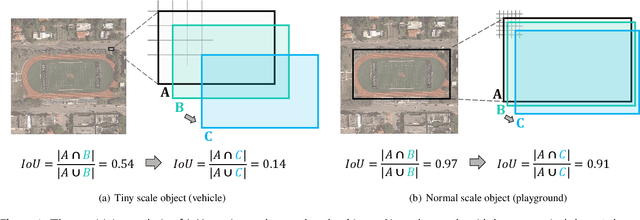
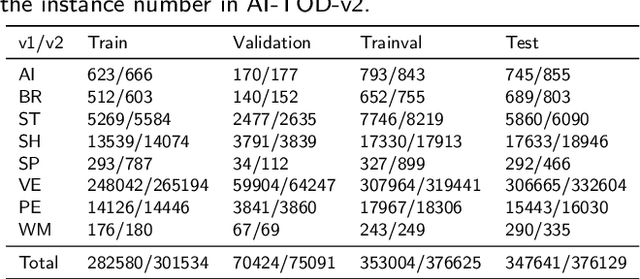
Tiny object detection (TOD) in aerial images is challenging since a tiny object only contains a few pixels. State-of-the-art object detectors do not provide satisfactory results on tiny objects due to the lack of supervision from discriminative features. Our key observation is that the Intersection over Union (IoU) metric and its extensions are very sensitive to the location deviation of the tiny objects, which drastically deteriorates the quality of label assignment when used in anchor-based detectors. To tackle this problem, we propose a new evaluation metric dubbed Normalized Wasserstein Distance (NWD) and a new RanKing-based Assigning (RKA) strategy for tiny object detection. The proposed NWD-RKA strategy can be easily embedded into all kinds of anchor-based detectors to replace the standard IoU threshold-based one, significantly improving label assignment and providing sufficient supervision information for network training. Tested on four datasets, NWD-RKA can consistently improve tiny object detection performance by a large margin. Besides, observing prominent noisy labels in the Tiny Object Detection in Aerial Images (AI-TOD) dataset, we are motivated to meticulously relabel it and release AI-TOD-v2 and its corresponding benchmark. In AI-TOD-v2, the missing annotation and location error problems are considerably mitigated, facilitating more reliable training and validation processes. Embedding NWD-RKA into DetectoRS, the detection performance achieves 4.3 AP points improvement over state-of-the-art competitors on AI-TOD-v2. Datasets, codes, and more visualizations are available at: https://chasel-tsui.github.io/AI-TOD-v2/
* Accepted by ISPRS Journal of Photogrammetry and Remote Sensing
Learning to Extract Building Footprints from Off-Nadir Aerial Images
Apr 28, 2022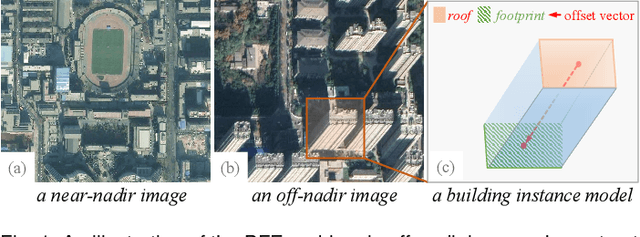
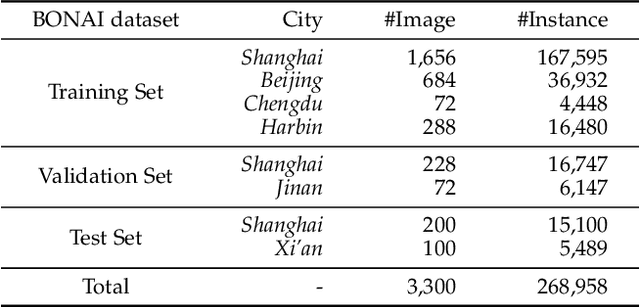
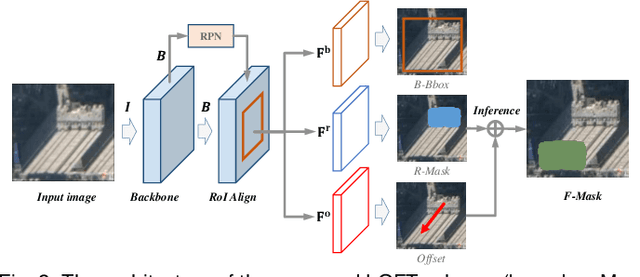
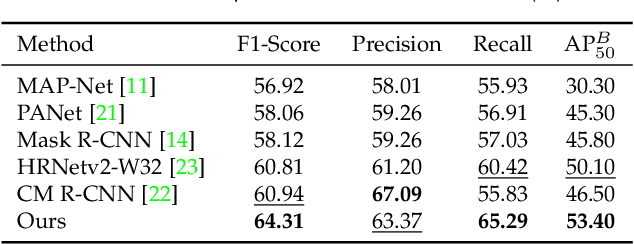
Extracting building footprints from aerial images is essential for precise urban mapping with photogrammetric computer vision technologies. Existing approaches mainly assume that the roof and footprint of a building are well overlapped, which may not hold in off-nadir aerial images as there is often a big offset between them. In this paper, we propose an offset vector learning scheme, which turns the building footprint extraction problem in off-nadir images into an instance-level joint prediction problem of the building roof and its corresponding "roof to footprint" offset vector. Thus the footprint can be estimated by translating the predicted roof mask according to the predicted offset vector. We further propose a simple but effective feature-level offset augmentation module, which can significantly refine the offset vector prediction by introducing little extra cost. Moreover, a new dataset, Buildings in Off-Nadir Aerial Images (BONAI), is created and released in this paper. It contains 268,958 building instances across 3,300 aerial images with fully annotated instance-level roof, footprint, and corresponding offset vector for each building. Experiments on the BONAI dataset demonstrate that our method achieves the state-of-the-art, outperforming other competitors by 3.37 to 7.39 points in F1-score. The codes, datasets, and trained models are available at https://github.com/jwwangchn/BONAI.git.
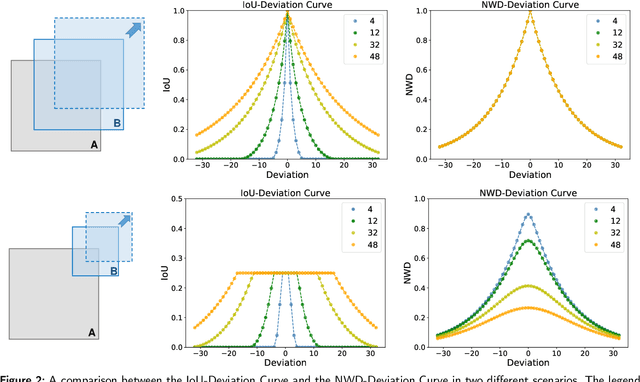
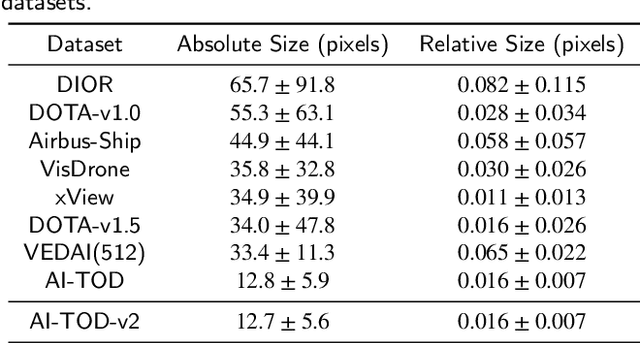
A Normalized Gaussian Wasserstein Distance for Tiny Object Detection
Oct 26, 2021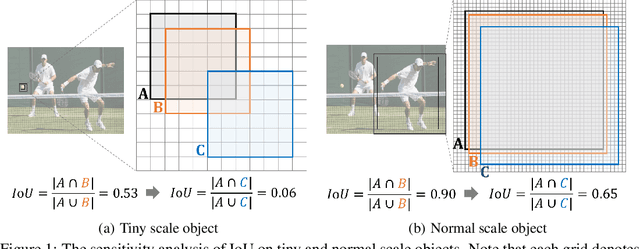
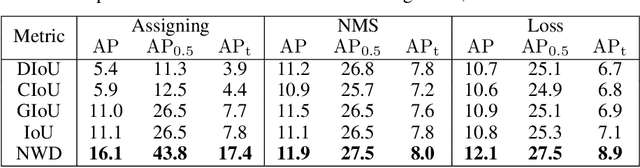
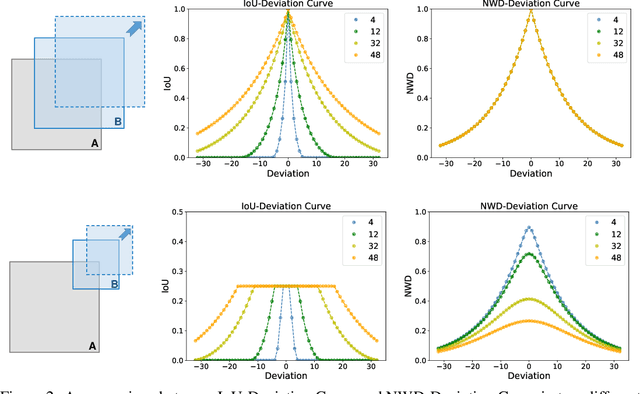
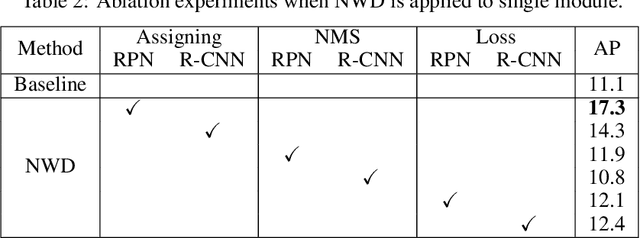
Detecting tiny objects is a very challenging problem since a tiny object only contains a few pixels in size. We demonstrate that state-of-the-art detectors do not produce satisfactory results on tiny objects due to the lack of appearance information. Our key observation is that Intersection over Union (IoU) based metrics such as IoU itself and its extensions are very sensitive to the location deviation of the tiny objects, and drastically deteriorate the detection performance when used in anchor-based detectors. To alleviate this, we propose a new evaluation metric using Wasserstein distance for tiny object detection. Specifically, we first model the bounding boxes as 2D Gaussian distributions and then propose a new metric dubbed Normalized Wasserstein Distance (NWD) to compute the similarity between them by their corresponding Gaussian distributions. The proposed NWD metric can be easily embedded into the assignment, non-maximum suppression, and loss function of any anchor-based detector to replace the commonly used IoU metric. We evaluate our metric on a new dataset for tiny object detection (AI-TOD) in which the average object size is much smaller than existing object detection datasets. Extensive experiments show that, when equipped with NWD metric, our approach yields performance that is 6.7 AP points higher than a standard fine-tuning baseline, and 6.0 AP points higher than state-of-the-art competitors.
Toward Autonomous Rotation-Aware Unmanned Aerial Grasping
Nov 09, 2018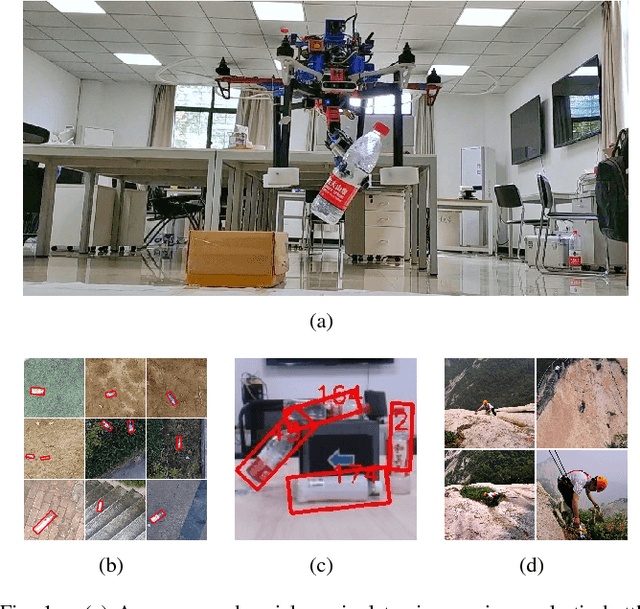
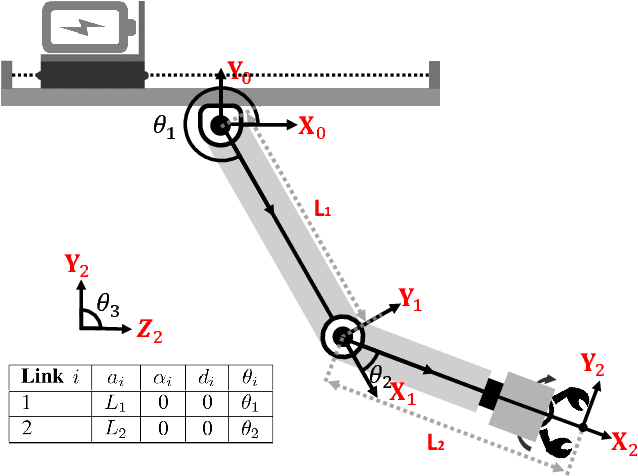
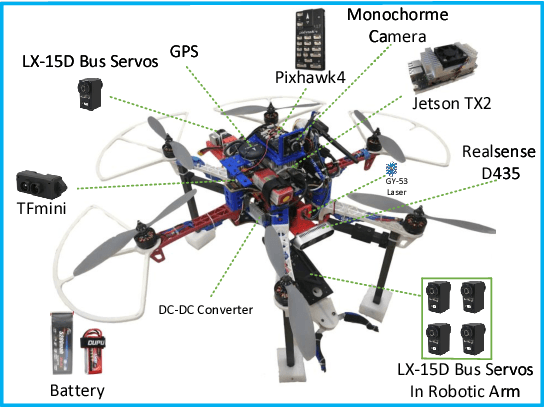
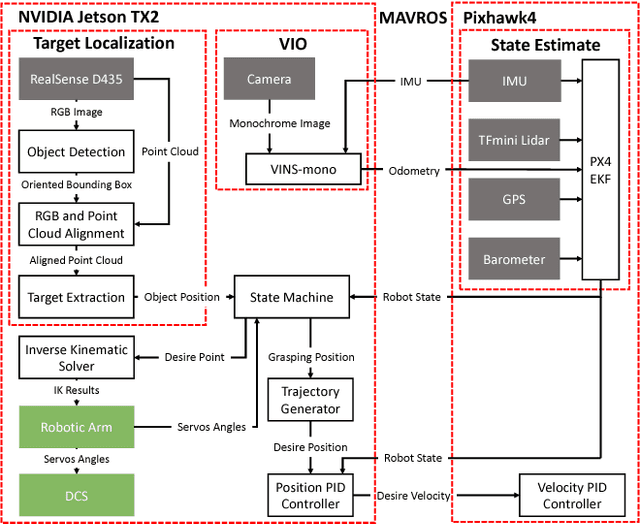
Autonomous Unmanned Aerial Manipulators (UAMs) have shown promising potentials to transform passive sensing missions into active 3-dimension interactive missions, but they still suffer from some difficulties impeding their wide applications, such as target detection and stabilization. This letter presents a vision-based autonomous UAM with a 3DoF robotic arm for rotational grasping, with a compensation on displacement for center of gravity. First, the hardware, software architecture and state estimation methods are detailed. All the mechanical designs are fully provided as open-source hardware for the reuse by the community. Then, we analyze the flow distribution generated by rotors and plan the robotic arm's motion based on this analysis. Next, a novel detection approach called Rotation-SqueezeDet is proposed to enable rotation-aware grasping, which can give the target position and rotation angle in near real-time on Jetson TX2. Finally, the effectiveness of the proposed scheme is validated in multiple experimental trials, highlighting it's applicability of autonomous aerial grasping in GPS-denied environments.