 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToward Autonomous Rotation-Aware Unmanned Aerial Grasping
Paper and Code
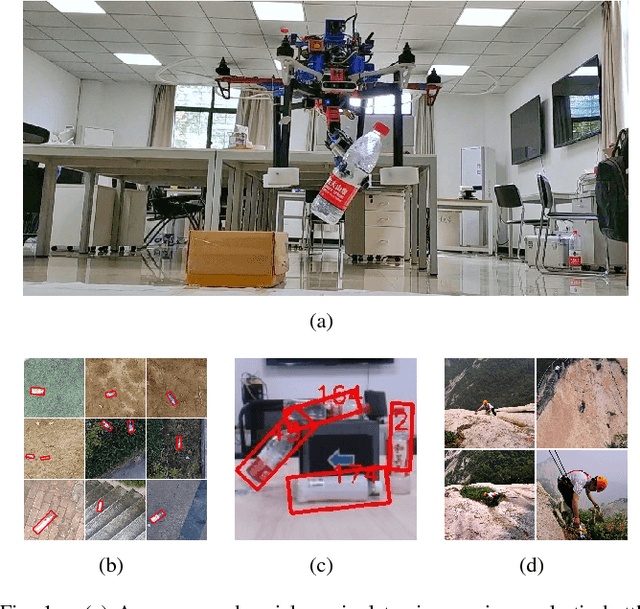
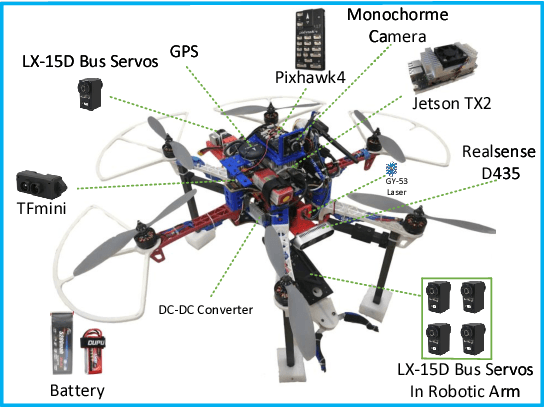
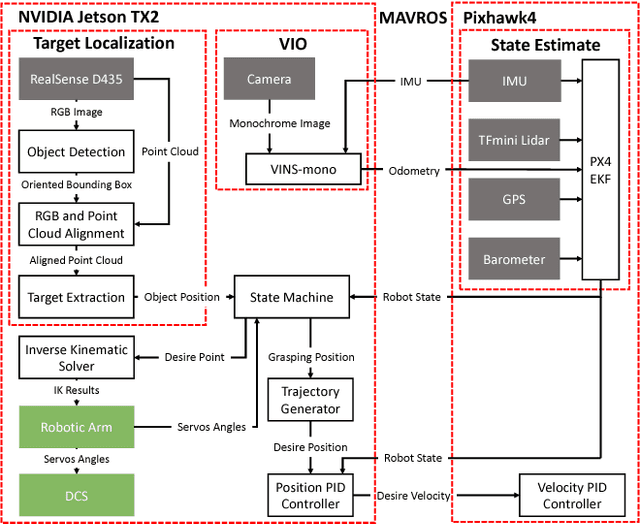
Autonomous Unmanned Aerial Manipulators (UAMs) have shown promising potentials to transform passive sensing missions into active 3-dimension interactive missions, but they still suffer from some difficulties impeding their wide applications, such as target detection and stabilization. This letter presents a vision-based autonomous UAM with a 3DoF robotic arm for rotational grasping, with a compensation on displacement for center of gravity. First, the hardware, software architecture and state estimation methods are detailed. All the mechanical designs are fully provided as open-source hardware for the reuse by the community. Then, we analyze the flow distribution generated by rotors and plan the robotic arm's motion based on this analysis. Next, a novel detection approach called Rotation-SqueezeDet is proposed to enable rotation-aware grasping, which can give the target position and rotation angle in near real-time on Jetson TX2. Finally, the effectiveness of the proposed scheme is validated in multiple experimental trials, highlighting it's applicability of autonomous aerial grasping in GPS-denied environments.