 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlowMOT: 3D Multi-Object Tracking by Scene Flow Association
Dec 15, 2020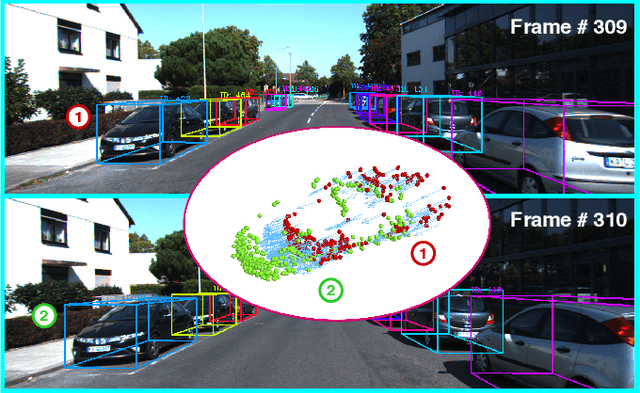

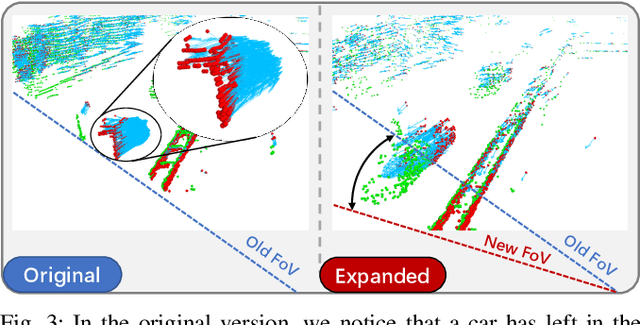

Most end-to-end Multi-Object Tracking (MOT) methods face the problems of low accuracy and poor generalization ability. Although traditional filter-based methods can achieve better results, they are difficult to be endowed with optimal hyperparameters and often fail in varying scenarios. To alleviate these drawbacks, we propose a LiDAR-based 3D MOT framework named FlowMOT, which integrates point-wise motion information into the traditional matching algorithm, enhancing the robustness of the data association. We firstly utilize a scene flow estimation network to obtain implicit motion information between two adjacent frames and calculate the predicted detection for each old tracklet in the previous frame. Then we use Hungarian algorithm to generate optimal matching relations with the ID propagation strategy to finish the tracking task. Experiments on KITTI MOT dataset show that our approach outperforms recent end-to-end methods and achieves competitive performance with the state-of-the-art filter-based method. In addition, ours can work steadily in the various-speed scenes where the filter-based methods may fail.
Moving Forward in Formation: A Decentralized Hierarchical Learning Approach to Multi-Agent Moving Together
Nov 04, 2020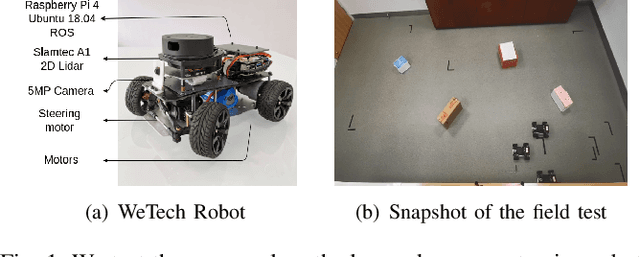
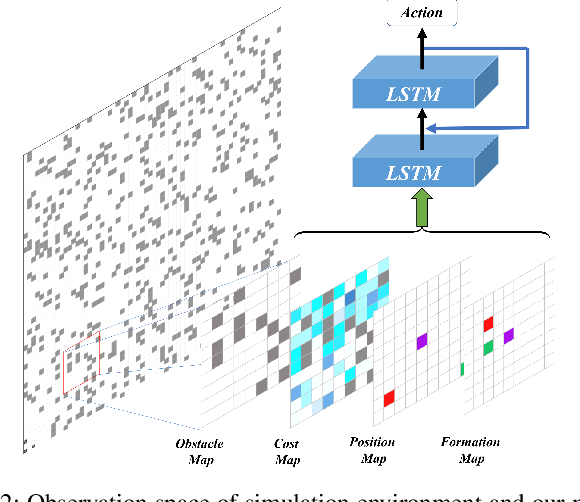
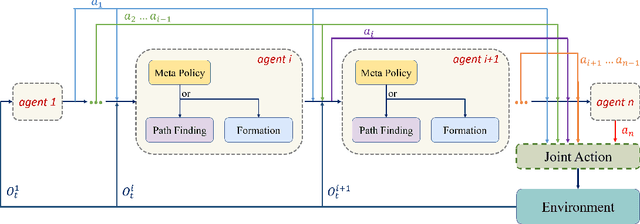
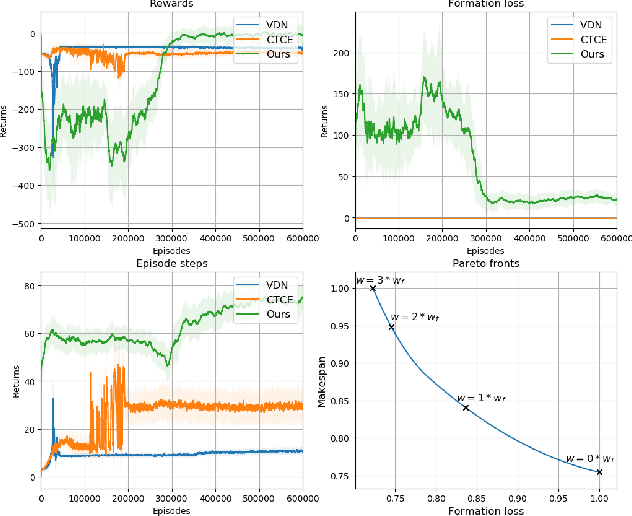
Multi-agent path finding in formation has many potential real-world applications like mobile warehouse robots. However, previous multi-agent path finding (MAPF) methods hardly take formation into consideration. Furthermore, they are usually centralized planners and require the whole state of the environment. Other decentralized partially observable approaches to MAPF are reinforcement learning (RL) methods. However, these RL methods encounter difficulties when learning path finding and formation problem at the same time. In this paper, we propose a novel decentralized partially observable RL algorithm that uses a hierarchical structure to decompose the multi objective task into unrelated ones. It also calculates a theoretical weight that makes every task reward has equal influence on the final RL value function. Additionally, we introduce a communication method that helps agents cooperate with each other. Experiments in simulation show that our method outperforms other end-to-end RL methods and our method can naturally scale to large world sizes where centralized planner struggles. We also deploy and validate our method in a real world scenario.
F-Siamese Tracker: A Frustum-based Double Siamese Network for 3D Single Object Tracking
Oct 22, 2020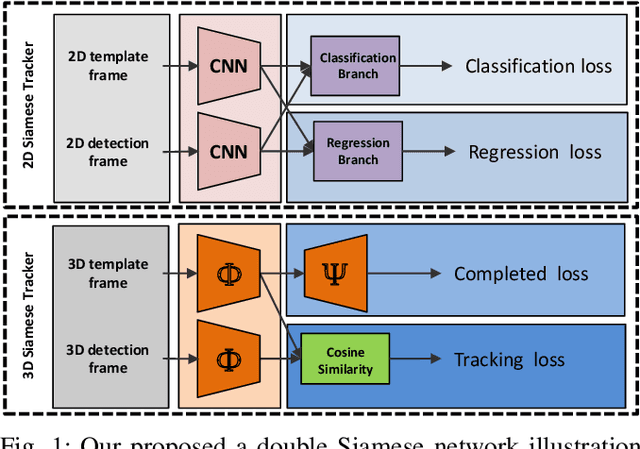
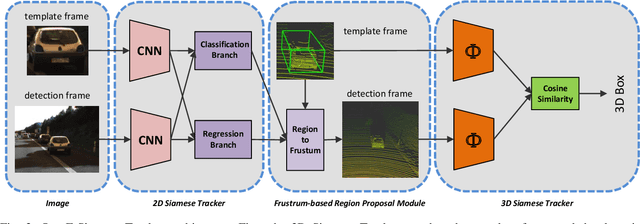
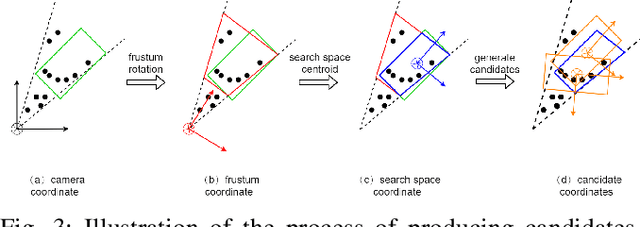
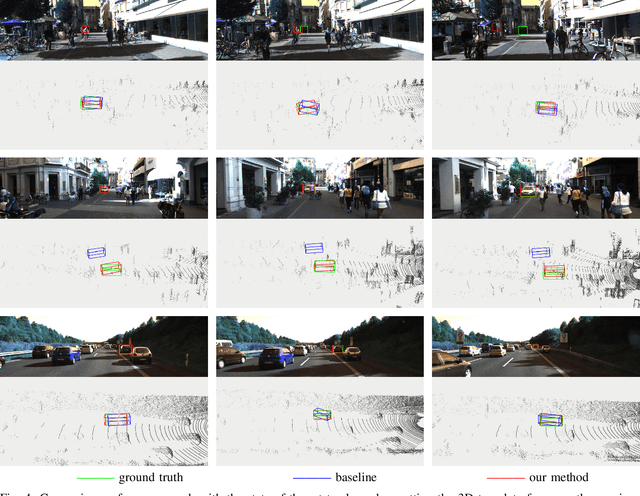
This paper presents F-Siamese Tracker, a novel approach for single object tracking prominently characterized by more robustly integrating 2D and 3D information to reduce redundant search space. A main challenge in 3D single object tracking is how to reduce search space for generating appropriate 3D candidates. Instead of solely relying on 3D proposals, firstly, our method leverages the Siamese network applied on RGB images to produce 2D region proposals which are then extruded into 3D viewing frustums. Besides, we perform an online accuracy validation on the 3D frustum to generate refined point cloud searching space, which can be embedded directly into the existing 3D tracking backbone. For efficiency, our approach gains better performance with fewer candidates by reducing search space. In addition, benefited from introducing the online accuracy validation, for occasional cases with strong occlusions or very sparse points, our approach can still achieve high precision, even when the 2D Siamese tracker loses the target. This approach allows us to set a new state-of-the-art in 3D single object tracking by a significant margin on a sparse outdoor dataset (KITTI tracking). Moreover, experiments on 2D single object tracking show that our framework boosts 2D tracking performance as well.