 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHow Users Understand Robot Foundation Model Performance through Task Success Rates and Beyond
Feb 03, 2026Robot Foundation Models (RFMs) represent a promising approach to developing general-purpose home robots. Given the broad capabilities of RFMs, users will inevitably ask an RFM-based robot to perform tasks that the RFM was not trained or evaluated on. In these cases, it is crucial that users understand the risks associated with attempting novel tasks due to the relatively high cost of failure. Furthermore, an informed user who understands an RFM's capabilities will know what situations and tasks the robot can handle. In this paper, we study how non-roboticists interpret performance information from RFM evaluations. These evaluations typically report task success rate (TSR) as the primary performance metric. While TSR is intuitive to experts, it is necessary to validate whether novices also use this information as intended. Toward this end, we conducted a study in which users saw real evaluation data, including TSR, failure case descriptions, and videos from multiple published RFM research projects. The results highlight that non-experts not only use TSR in a manner consistent with expert expectations but also highly value other information types, such as failure cases that are not often reported in RFM evaluations. Furthermore, we find that users want access to both real data from previous evaluations of the RFM and estimates from the robot about how well it will do on a novel task.
WebGraphEval: Multi-Turn Trajectory Evaluation for Web Agents using Graph Representation
Oct 22, 2025Current evaluation of web agents largely reduces to binary success metrics or conformity to a single reference trajectory, ignoring the structural diversity present in benchmark datasets. We present WebGraphEval, a framework that abstracts trajectories from multiple agents into a unified, weighted action graph. This representation is directly compatible with benchmarks such as WebArena, leveraging leaderboard runs and newly collected trajectories without modifying environments. The framework canonically encodes actions, merges recurring behaviors, and applies structural analyses including reward propagation and success-weighted edge statistics. Evaluations across thousands of trajectories from six web agents show that the graph abstraction captures cross-model regularities, highlights redundancy and inefficiency, and identifies critical decision points overlooked by outcome-based metrics. By framing web interaction as graph-structured data, WebGraphEval establishes a general methodology for multi-path, cross-agent, and efficiency-aware evaluation of web agents.
CHARM: Considering Human Attributes for Reinforcement Modeling
Jun 16, 2025
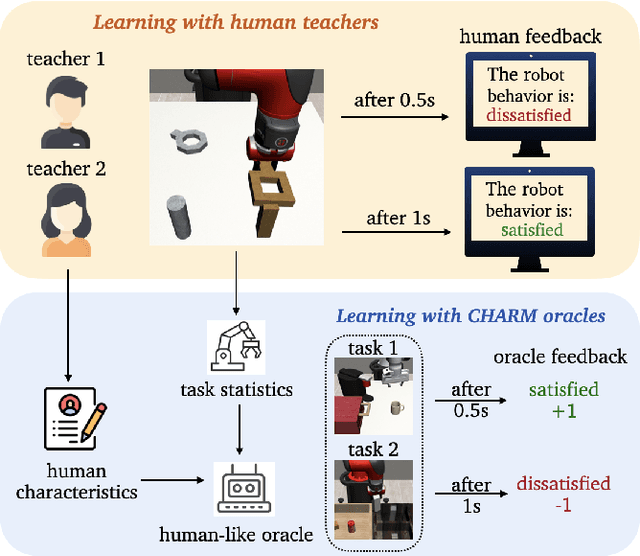
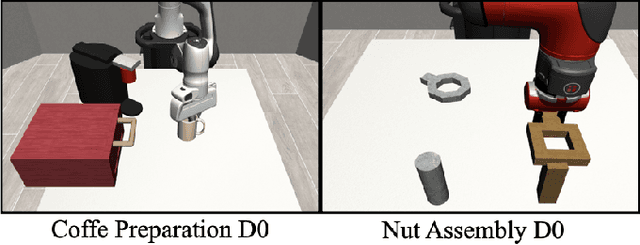

Reinforcement Learning from Human Feedback has recently achieved significant success in various fields, and its performance is highly related to feedback quality. While much prior work acknowledged that human teachers' characteristics would affect human feedback patterns, there is little work that has closely investigated the actual effects. In this work, we designed an exploratory study investigating how human feedback patterns are associated with human characteristics. We conducted a public space study with two long horizon tasks and 46 participants. We found that feedback patterns are not only correlated with task statistics, such as rewards, but also correlated with participants' characteristics, especially robot experience and educational background. Additionally, we demonstrated that human feedback value can be more accurately predicted with human characteristics compared to only using task statistics. All human feedback and characteristics we collected, and codes for our data collection and predicting more accurate human feedback are available at https://github.com/AABL-Lab/CHARM
On the Effect of Robot Errors on Human Teaching Dynamics
Sep 15, 2024Human-in-the-loop learning is gaining popularity, particularly in the field of robotics, because it leverages human knowledge about real-world tasks to facilitate agent learning. When people instruct robots, they naturally adapt their teaching behavior in response to changes in robot performance. While current research predominantly focuses on integrating human teaching dynamics from an algorithmic perspective, understanding these dynamics from a human-centered standpoint is an under-explored, yet fundamental problem. Addressing this issue will enhance both robot learning and user experience. Therefore, this paper explores one potential factor contributing to the dynamic nature of human teaching: robot errors. We conducted a user study to investigate how the presence and severity of robot errors affect three dimensions of human teaching dynamics: feedback granularity, feedback richness, and teaching time, in both forced-choice and open-ended teaching contexts. The results show that people tend to spend more time teaching robots with errors, provide more detailed feedback over specific segments of a robot's trajectory, and that robot error can influence a teacher's choice of feedback modality. Our findings offer valuable insights for designing effective interfaces for interactive learning and optimizing algorithms to better understand human intentions.
Reconstructing Sinus Anatomy from Endoscopic Video -- Towards a Radiation-free Approach for Quantitative Longitudinal Assessment
Mar 18, 2020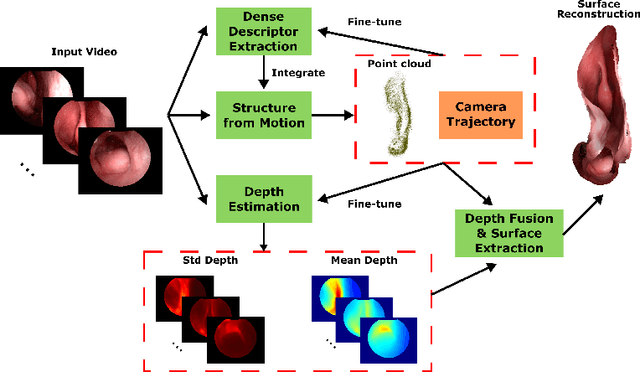
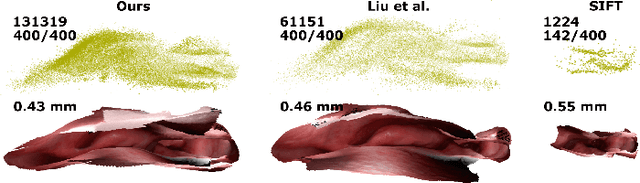
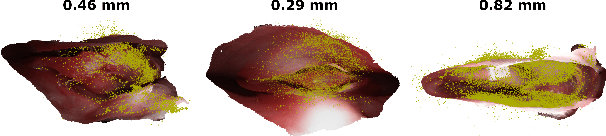
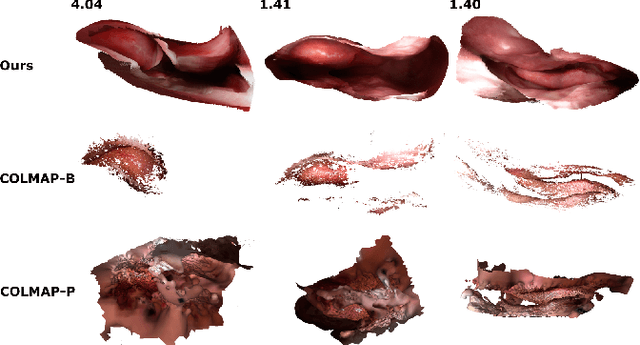
Reconstructing accurate 3D surface models of sinus anatomy directly from an endoscopic video is a promising avenue for cross-sectional and longitudinal analysis to better understand the relationship between sinus anatomy and surgical outcomes. We present a patient-specific, learning-based method for 3D reconstruction of sinus surface anatomy directly and only from endoscopic videos. We demonstrate the effectiveness and accuracy of our method on in and ex vivo data where we compare to sparse reconstructions from Structure from Motion, dense reconstruction from COLMAP, and ground truth anatomy from CT. Our textured reconstructions are watertight and enable measurement of clinically relevant parameters in good agreement with CT. The source code will be made publicly available upon publication.