 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSynthetic Examples Improve Generalization for Rare Classes
May 14, 2019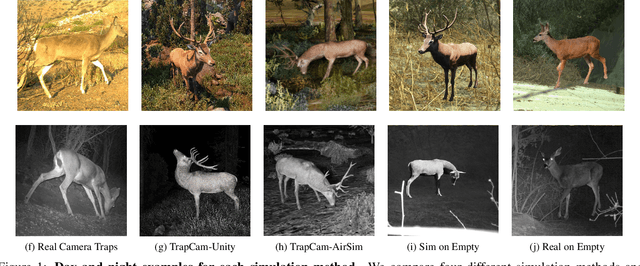
The ability to detect and classify rare occurrences in images has important applications - for example, counting rare and endangered species when studying biodiversity, or detecting infrequent traffic scenarios that pose a danger to self-driving cars. Few-shot learning is an open problem: current computer vision systems struggle to categorize objects they have seen only rarely during training, and collecting a sufficient number of training examples of rare events is often challenging and expensive, and sometimes outright impossible. We explore in depth an approach to this problem: complementing the few available training images with ad-hoc simulated data. Our testbed is animal species classification, which has a real-world long-tailed distribution. We analyze the effect of different axes of variation in simulation, such as pose, lighting, model, and simulation method, and we prescribe best practices for efficiently incorporating simulated data for real-world performance gain. Our experiments reveal that synthetic data can considerably reduce error rates for classes that are rare, that as the amount of simulated data is increased, accuracy on the target class improves, and that high variation of simulated data provides maximum performance gain.
Autonomous Thermalling as a Partially Observable Markov Decision Process (Extended Version)
May 24, 2018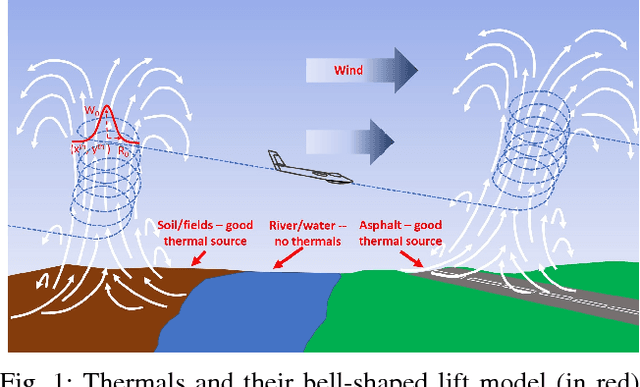

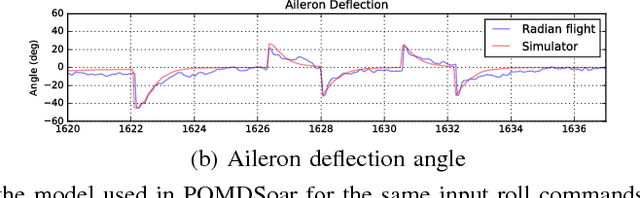
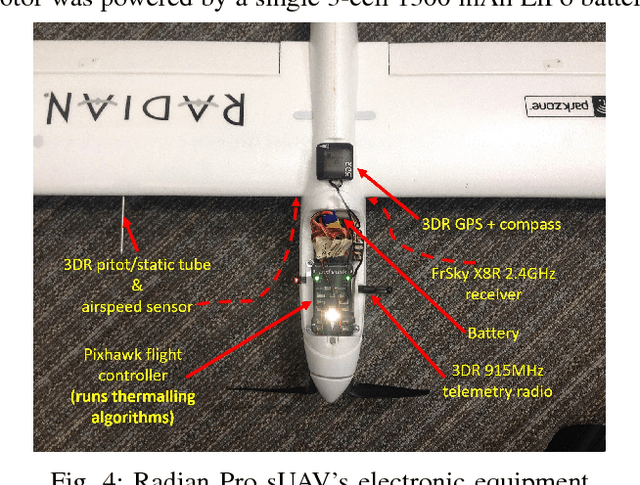
Small uninhabited aerial vehicles (sUAVs) commonly rely on active propulsion to stay airborne, which limits flight time and range. To address this, autonomous soaring seeks to utilize free atmospheric energy in the form of updrafts (thermals). However, their irregular nature at low altitudes makes them hard to exploit for existing methods. We model autonomous thermalling as a POMDP and present a receding-horizon controller based on it. We implement it as part of ArduPlane, a popular open-source autopilot, and compare it to an existing alternative in a series of live flight tests involving two sUAVs thermalling simultaneously, with our POMDP-based controller showing a significant advantage.