 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeArduSoar: an Open-Source Thermalling Controller for Resource-Constrained Autopilots
Aug 21, 2018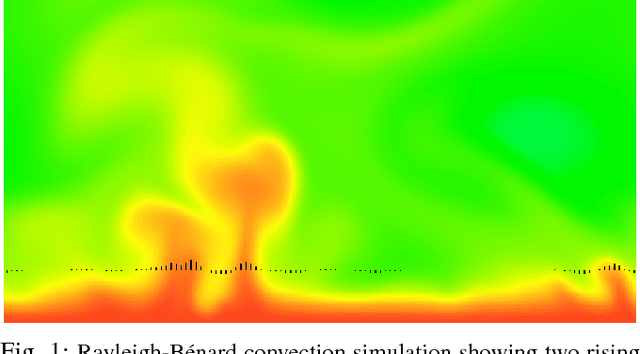
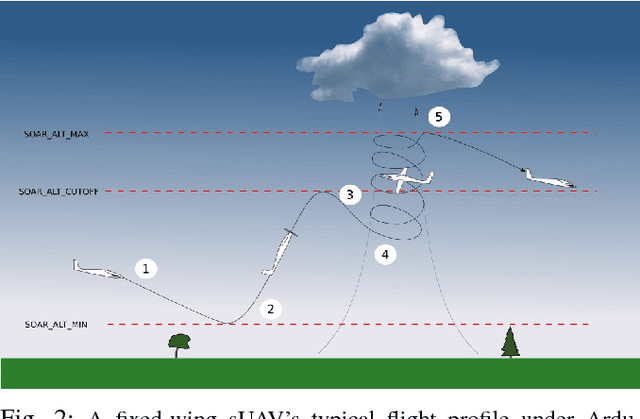
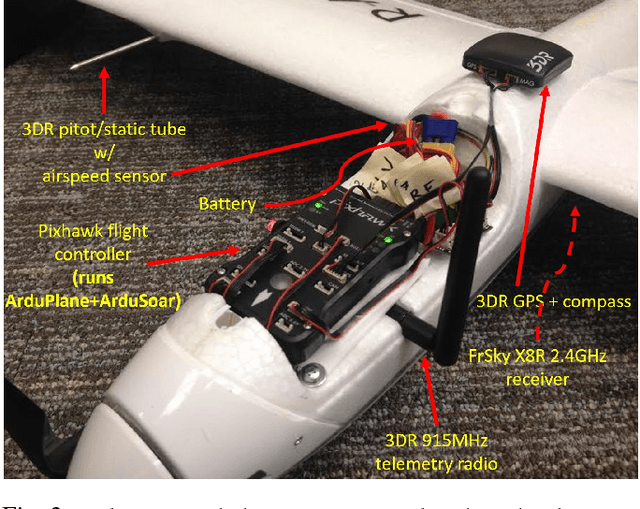
Autonomous soaring capability has the potential to significantly increase time aloft for fixed-wing UAVs. In this paper, we introduce ArduSoar, the first soaring controller integrated into a major autopilot software suite for small UAVs. We describe ArduSoar from the algorithmic standpoint, outline its integration with the ArduPlane autopilot, discuss parameter tuning for it, and conduct a series of flight tests on real sUAVs that show ArduSoar's robustness even in highly non-ideal atmospheric conditions.
Autonomous Thermalling as a Partially Observable Markov Decision Process (Extended Version)
May 24, 2018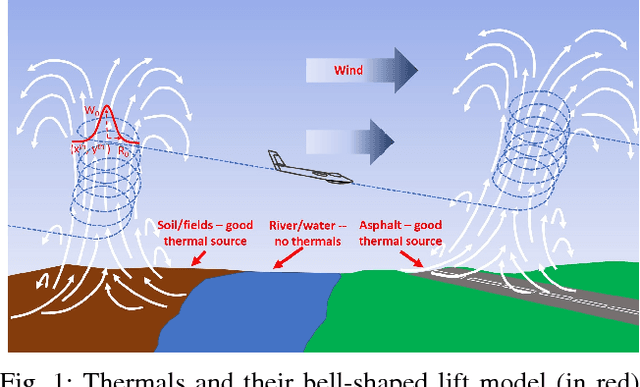

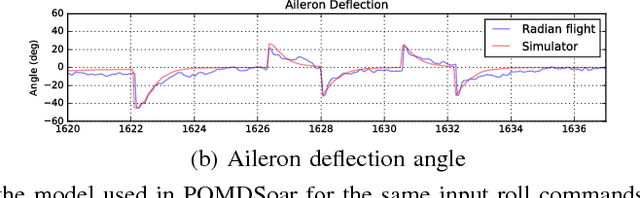
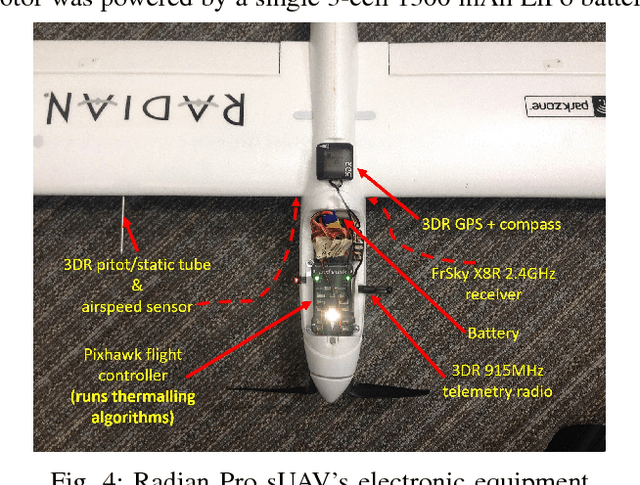
Small uninhabited aerial vehicles (sUAVs) commonly rely on active propulsion to stay airborne, which limits flight time and range. To address this, autonomous soaring seeks to utilize free atmospheric energy in the form of updrafts (thermals). However, their irregular nature at low altitudes makes them hard to exploit for existing methods. We model autonomous thermalling as a POMDP and present a receding-horizon controller based on it. We implement it as part of ArduPlane, a popular open-source autopilot, and compare it to an existing alternative in a series of live flight tests involving two sUAVs thermalling simultaneously, with our POMDP-based controller showing a significant advantage.