Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeArduSoar: an Open-Source Thermalling Controller for Resource-Constrained Autopilots
Aug 21, 2018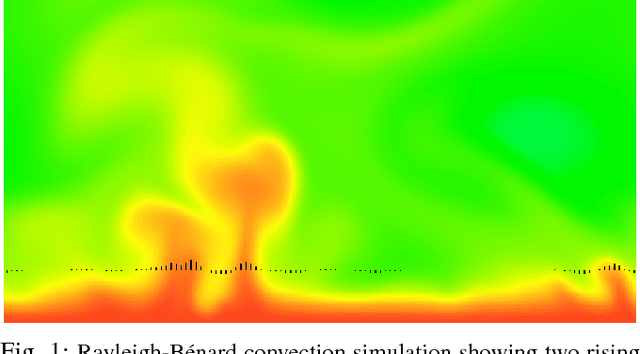
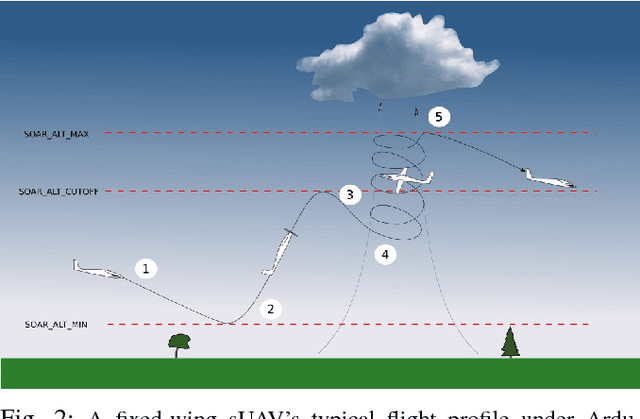
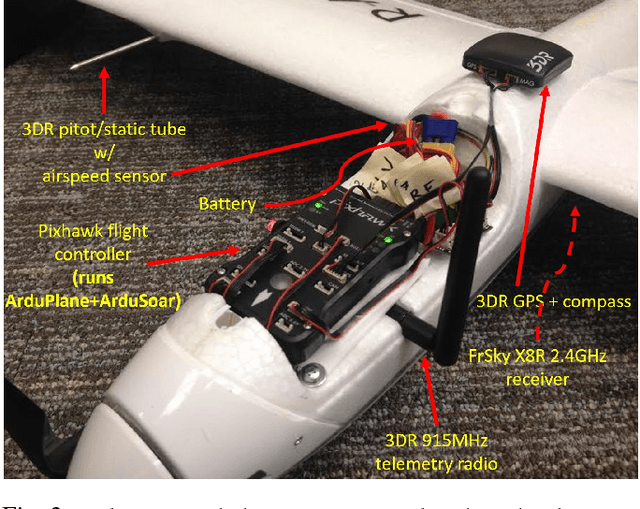
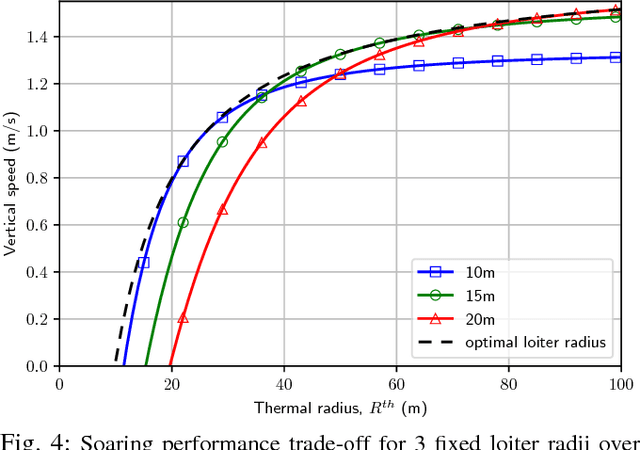
Autonomous soaring capability has the potential to significantly increase time aloft for fixed-wing UAVs. In this paper, we introduce ArduSoar, the first soaring controller integrated into a major autopilot software suite for small UAVs. We describe ArduSoar from the algorithmic standpoint, outline its integration with the ArduPlane autopilot, discuss parameter tuning for it, and conduct a series of flight tests on real sUAVs that show ArduSoar's robustness even in highly non-ideal atmospheric conditions.
Via