 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNatural Language-Driven Global Mapping of Martian Landforms
Jan 22, 2026Planetary surfaces are typically analyzed using high-level semantic concepts in natural language, yet vast orbital image archives remain organized at the pixel level. This mismatch limits scalable, open-ended exploration of planetary surfaces. Here we present MarScope, a planetary-scale vision-language framework enabling natural language-driven, label-free mapping of Martian landforms. MarScope aligns planetary images and text in a shared semantic space, trained on over 200,000 curated image-text pairs. This framework transforms global geomorphic mapping on Mars by replacing pre-defined classifications with flexible semantic retrieval, enabling arbitrary user queries across the entire planet in 5 seconds with F1 scores up to 0.978. Applications further show that it extends beyond morphological classification to facilitate process-oriented analysis and similarity-based geomorphological mapping at a planetary scale. MarScope establishes a new paradigm where natural language serves as a direct interface for scientific discovery over massive geospatial datasets.
OppLoD: the Opponency based Looming Detector, Model Extension of Looming Sensitivity from LGMD to LPLC2
Feb 10, 2023



Looming detection plays an important role in insect collision prevention systems. As a vital capability evolutionary survival, it has been extensively studied in neuroscience and is attracting increasing research interest in robotics due to its close relationship with collision detection and navigation. Visual cues such as angular size, angular velocity, and expansion have been widely studied for looming detection by means of optic flow or elementary neural computing research. However, a critical visual motion cue has been long neglected because it is so easy to be confused with expansion, that is radial-opponent-motion (ROM). Recent research on the discovery of LPLC2, a ROM-sensitive neuron in Drosophila, has revealed its ultra-selectivity because it only responds to stimuli with focal, outward movement. This characteristic of ROM-sensitivity is consistent with the demand for collision detection because it is strongly associated with danger looming that is moving towards the center of the observer. Thus, we hope to extend the well-studied neural model of the lobula giant movement detector (LGMD) with ROM-sensibility in order to enhance robustness and accuracy at the same time. In this paper, we investigate the potential to extend an image velocity-based looming detector, the lobula giant movement detector (LGMD), with ROM-sensibility. To achieve this, we propose the mathematical definition of ROM and its main property, the radial motion opponency (RMO). Then, a synaptic neuropile that analogizes the synaptic processing of LPLC2 is proposed in the form of lateral inhibition and attention. Thus, our proposed model is the first to perform both image velocity selectivity and ROM sensitivity. Systematic experiments are conducted to exhibit the huge potential of the proposed bio-inspired looming detector.
Attention and Prediction Guided Motion Detection for Low-Contrast Small Moving Targets
May 08, 2021



Small target motion detection within complex natural environments is an extremely challenging task for autonomous robots. Surprisingly, the visual systems of insects have evolved to be highly efficient in detecting mates and tracking prey, even though targets are as small as a few pixels in their visual fields. The excellent sensitivity to small target motion relies on a class of specialized neurons called small target motion detectors (STMDs). However, existing STMD-based models are heavily dependent on visual contrast and perform poorly in complex natural environments where small targets generally exhibit extremely low contrast against neighbouring backgrounds. In this paper, we develop an attention and prediction guided visual system to overcome this limitation. The developed visual system comprises three main subsystems, namely, an attention module, an STMD-based neural network, and a prediction module. The attention module searches for potential small targets in the predicted areas of the input image and enhances their contrast against complex background. The STMD-based neural network receives the contrast-enhanced image and discriminates small moving targets from background false positives. The prediction module foresees future positions of the detected targets and generates a prediction map for the attention module. The three subsystems are connected in a recurrent architecture allowing information to be processed sequentially to activate specific areas for small target detection. Extensive experiments on synthetic and real-world datasets demonstrate the effectiveness and superiority of the proposed visual system for detecting small, low-contrast moving targets against complex natural environments.
Enhancing LGMD's Looming Selectivity for UAVs with Spatial-temporal Distributed Presynaptic Connection
May 19, 2020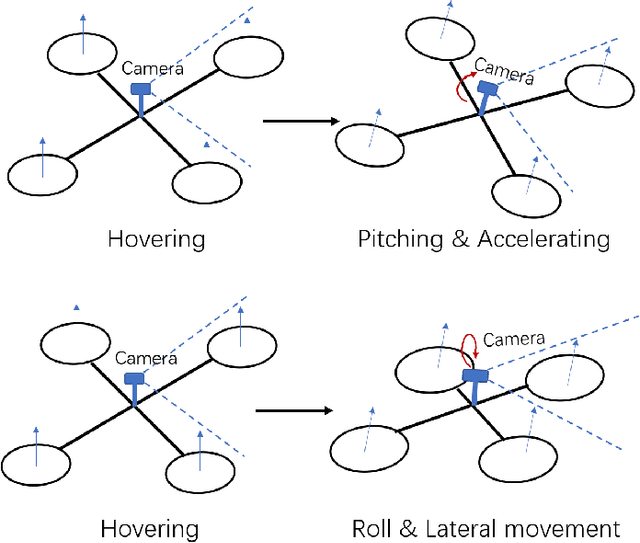
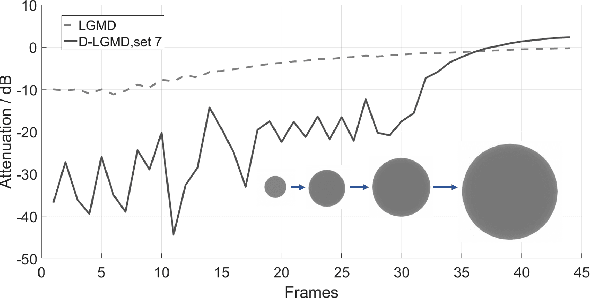
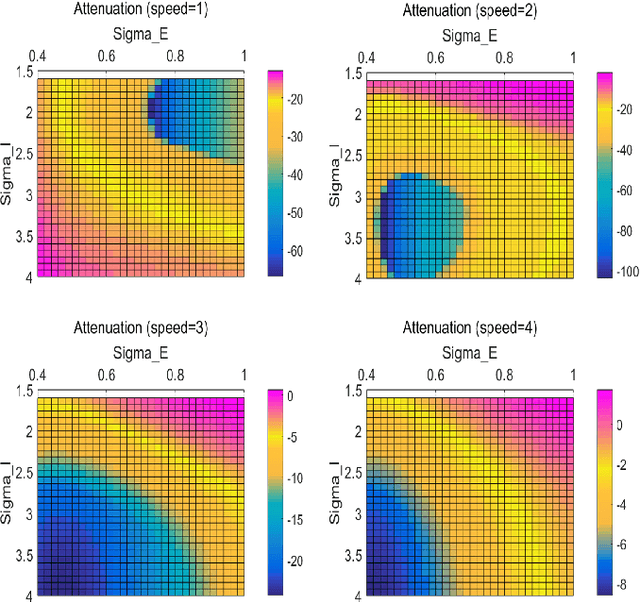
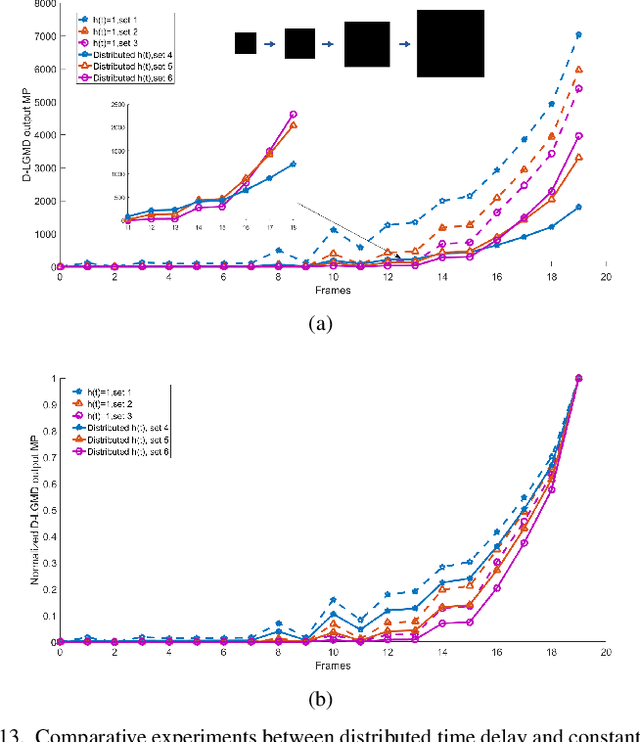
Collision detection is one of the most challenging tasks for Unmanned Aerial Vehicles (UAVs), especially for small or micro UAVs with limited computational power. In nature, fly insects with compact and simple visual systems demonstrate the amazing ability to navigating and avoid collision in a complex environment. A good example of this is locusts. Locusts avoid collision in a dense swarm relying on an identified vision neuron called Lobula Giant Movement Detector (LGMD) which has been modelled and applied on ground robots and vehicles. LGMD as a fly insect's visual neuron, is an ideal model for UAV collision detection. However, the existing models are inadequate in coping with complex visual challenges unique for UAVs. In this paper, we proposed a new LGMD model for flying robots considering distributed spatial-temporal computing for both excitation and inhibition to enhance the looming selectivity in flying scenes. The proposed model integrated recent discovered presynaptic connection types in biological LGMD neuron into a spatial-temporal filter with linear distributed interconnection. Systematic experiments containing quadcopter's first person view (FPV) flight videos demonstrated that the proposed distributed presynaptic structure can dramatically enhance LGMD's looming selectivity especially in complex flying UAV applications.
Does Time-Delay Feedback Matter to Small Target Motion Detection Against Complex Dynamic Environments?
Dec 29, 2019
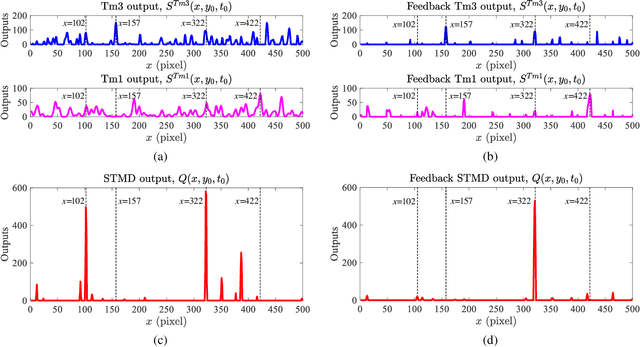
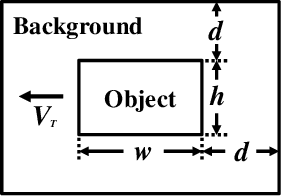
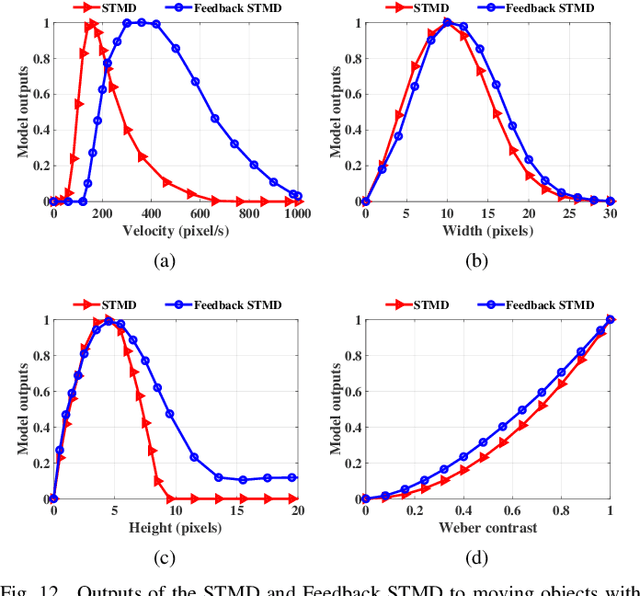
Discriminating small moving objects in complex visual environments is a significant challenge for autonomous micro robots that are generally limited in computational power. Relying on well-evolved visual systems, flying insects can effortlessly detect mates and track prey in rapid pursuits, despite target sizes as small as a few pixels in the visual field. Such exquisite sensitivity for small target motion is known to be supported by a class of specialized neurons named as small target motion detectors (STMDs). The existing STMD-based models normally consist of four sequentially arranged neural layers interconnected through feedforward loops to extract motion information about small targets from raw visual inputs. However, feedback loop, another important regulatory circuit for motion perception, has not been investigated in the STMD pathway and its functional roles for small target motion detection are not clear. In this paper, we assume the existence of the feedback and propose a STMD-based visual system with feedback connection (Feedback STMD), where the system output is temporally delayed, then fed back to lower layers to mediate neural responses. We compare the properties of the visual system with and without the time-delay feedback loop, and discuss its effect on small target motion detection. The experimental results suggest that the Feedback STMD prefers fast-moving small targets, while significantly suppresses those background features moving at lower velocities.
An LGMD Based Competitive Collision Avoidance Strategy for UAV
Apr 15, 2019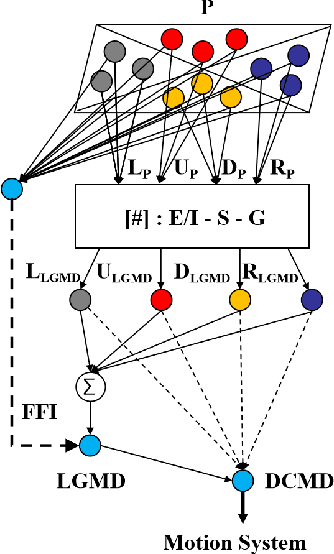
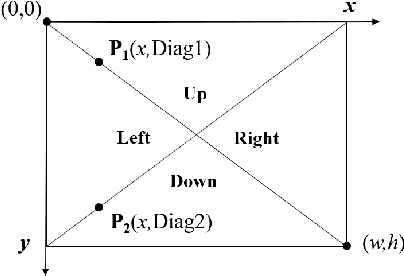
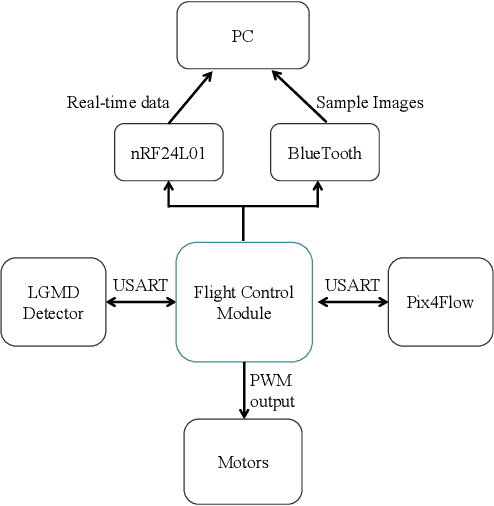
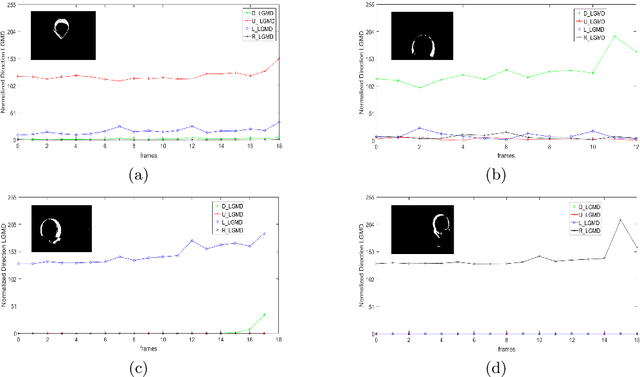
Building a reliable and efficient collision avoidance system for unmanned aerial vehicles (UAVs) is still a challenging problem. This research takes inspiration from locusts, which can fly in dense swarms for hundreds of miles without collision. In the locust's brain, a visual pathway of LGMD-DCMD (lobula giant movement detector and descending contra-lateral motion detector) has been identified as collision perception system guiding fast collision avoidance for locusts, which is ideal for designing artificial vision systems. However, there is very few works investigating its potential in real-world UAV applications. In this paper, we present an LGMD based competitive collision avoidance method for UAV indoor navigation. Compared to previous works, we divided the UAV's field of view into four subfields each handled by an LGMD neuron. Therefore, four individual competitive LGMDs (C-LGMD) compete for guiding the directional collision avoidance of UAV. With more degrees of freedom compared to ground robots and vehicles, the UAV can escape from collision along four cardinal directions (e.g. the object approaching from the left-side triggers a rightward shifting of the UAV). Our proposed method has been validated by both simulations and real-time quadcopter arena experiments.
A Bio-inspired Collision Detecotr for Small Quadcopter
Jan 14, 2018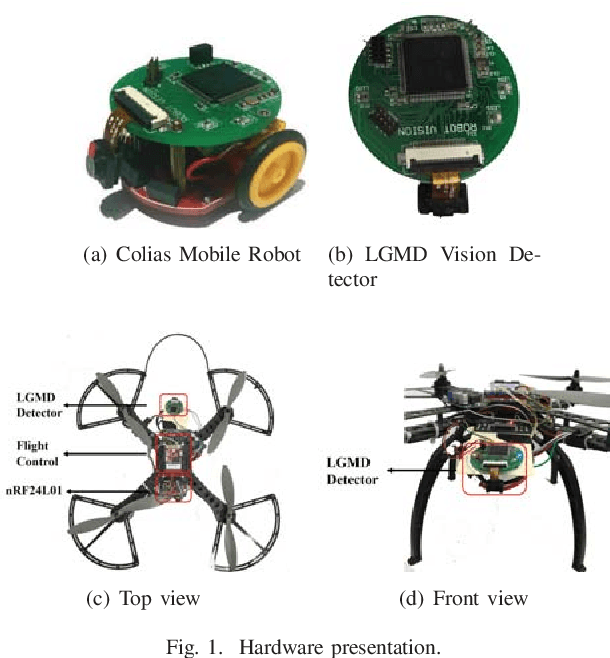
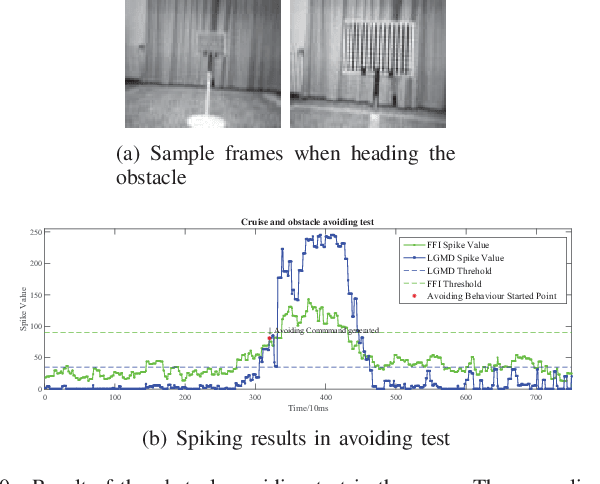
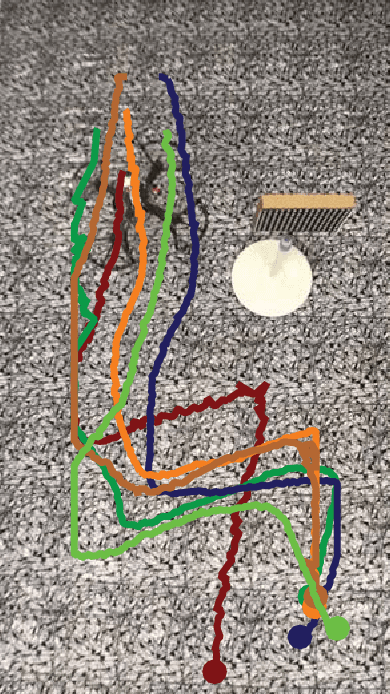
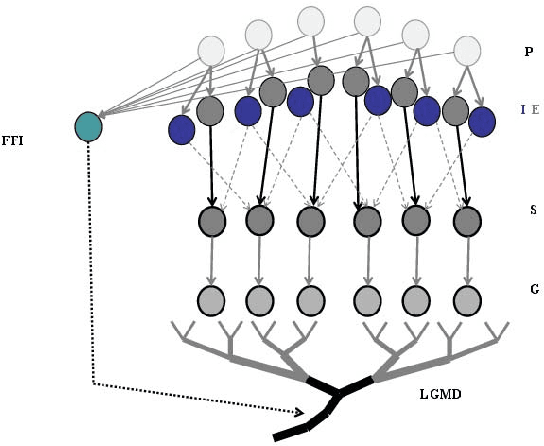
Sense and avoid capability enables insects to fly versatilely and robustly in dynamic complex environment. Their biological principles are so practical and efficient that inspired we human imitating them in our flying machines. In this paper, we studied a novel bio-inspired collision detector and its application on a quadcopter. The detector is inspired from LGMD neurons in the locusts, and modeled into an STM32F407 MCU. Compared to other collision detecting methods applied on quadcopters, we focused on enhancing the collision selectivity in a bio-inspired way that can considerably increase the computing efficiency during an obstacle detecting task even in complex dynamic environment. We designed the quadcopter's responding operation imminent collisions and tested this bio-inspired system in an indoor arena. The observed results from the experiments demonstrated that the LGMD collision detector is feasible to work as a vision module for the quadcopter's collision avoidance task.