 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Neural Field Modeling of Visual Contrast for Perceiving Incoherent Looming
Apr 06, 2025Amari's Dynamic Neural Field (DNF) framework provides a brain-inspired approach to modeling the average activation of neuronal groups. Leveraging a single field, DNF has become a promising foundation for low-energy looming perception module in robotic applications. However, the previous DNF methods face significant challenges in detecting incoherent or inconsistent looming features--conditions commonly encountered in real-world scenarios, such as collision detection in rainy weather. Insights from the visual systems of fruit flies and locusts reveal encoding ON/OFF visual contrast plays a critical role in enhancing looming selectivity. Additionally, lateral excitation mechanism potentially refines the responses of loom-sensitive neurons to both coherent and incoherent stimuli. Together, these offer valuable guidance for improving looming perception models. Building on these biological evidence, we extend the previous single-field DNF framework by incorporating the modeling of ON/OFF visual contrast, each governed by a dedicated DNF. Lateral excitation within each ON/OFF-contrast field is formulated using a normalized Gaussian kernel, and their outputs are integrated in the Summation field to generate collision alerts. Experimental evaluations show that the proposed model effectively addresses incoherent looming detection challenges and significantly outperforms state-of-the-art locust-inspired models. It demonstrates robust performance across diverse stimuli, including synthetic rain effects, underscoring its potential for reliable looming perception in complex, noisy environments with inconsistent visual cues.
A Bio-Inspired Research Paradigm of Collision Perception Neurons Enabling Neuro-Robotic Integration: The LGMD Case
Jan 06, 2025Compared to human vision, insect visual systems excel at rapid and precise collision detection, despite relying on only tens of thousands of neurons organized through a few neuropils. This efficiency makes them an attractive model system for developing artificial collision-detecting systems. Specifically, researchers have identified collision-selective neurons in the locust's optic lobe, called lobula giant movement detectors (LGMDs), which respond specifically to approaching objects. Research upon LGMD neurons began in the early 1970s. Initially, due to their large size, these neurons were identified as motion detectors, but their role as looming detectors was recognized over time. Since then, progress in neuroscience, computational modeling of LGMD's visual neural circuits, and LGMD-based robotics has advanced in tandem, each field supporting and driving the others. Today, with a deeper understanding of LGMD neurons, LGMD-based models have significantly improved collision-free navigation in mobile robots including ground and aerial robots. This review highlights recent developments in LGMD research from the perspectives of neuroscience, computational modeling, and robotics. It emphasizes a biologically plausible research paradigm, where insights from neuroscience inform real-world applications, which would in turn validate and advance neuroscience. With strong support from extensive research and growing application demand, this paradigm has reached a mature stage and demonstrates versatility across different areas of neuroscience research, thereby enhancing our understanding of the interconnections between neuroscience, computational modeling, and robotics. Furthermore, other motion-sensitive neurons have also shown promising potential for adopting this research paradigm.
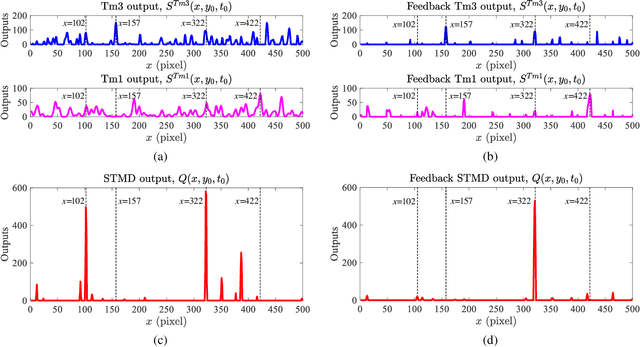
Spatio-Temporal Feedback Control of Small Target Motion Detection Visual System
Nov 18, 2022



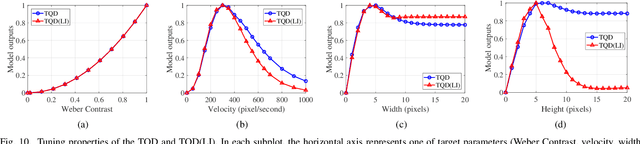
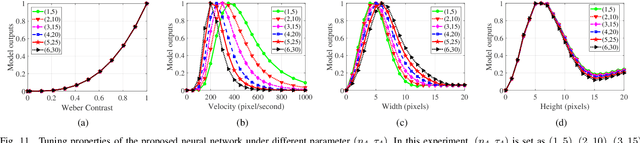
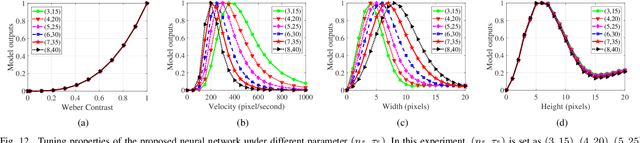
Feedback is crucial to motion perception in animals' visual systems where its spatial and temporal dynamics are often shaped by movement patterns of surrounding environments. However, such spatio-temporal feedback has not been deeply explored in designing neural networks to detect small moving targets that cover only one or a few pixels in image while presenting extremely limited visual features. In this paper, we address small target motion detection problem by developing a visual system with spatio-temporal feedback loop, and further reveal its important roles in suppressing false positive background movement while enhancing network responses to small targets. Specifically, the proposed visual system is composed of two complementary subnetworks. The first subnetwork is designed to extract spatial and temporal motion patterns of cluttered backgrounds by neuronal ensemble coding. The second subnetwork is developed to capture small target motion information and integrate the spatio-temporal feedback signal from the first subnetwork to inhibit background false positives. Experimental results demonstrate that the proposed spatio-temporal feedback visual system is more competitive than existing methods in discriminating small moving targets from complex dynamic environment.
Profiling Visual Dynamic Complexity Using a Bio-Robotic Approach
May 20, 2021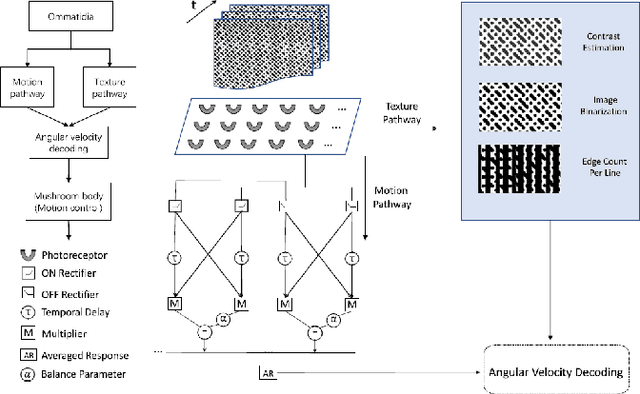
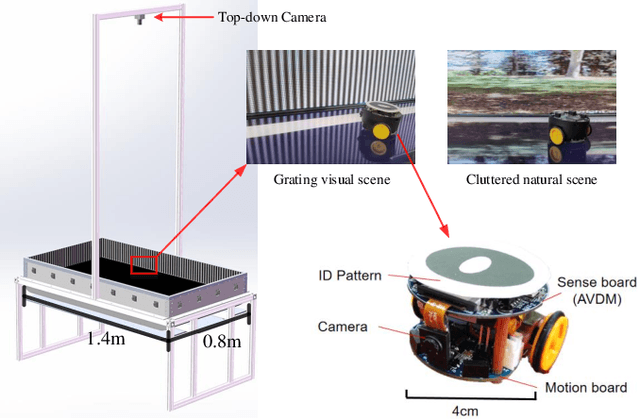
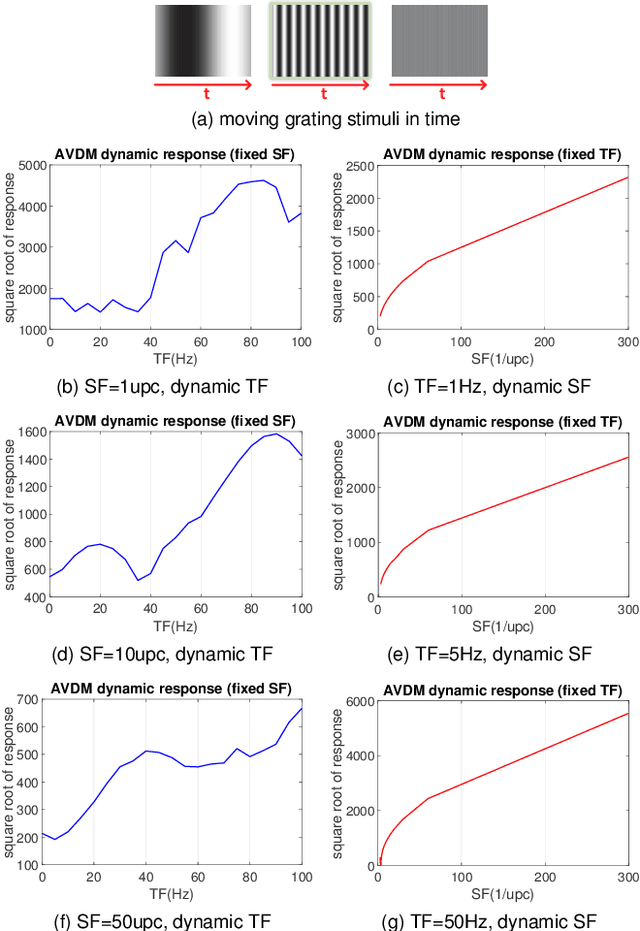
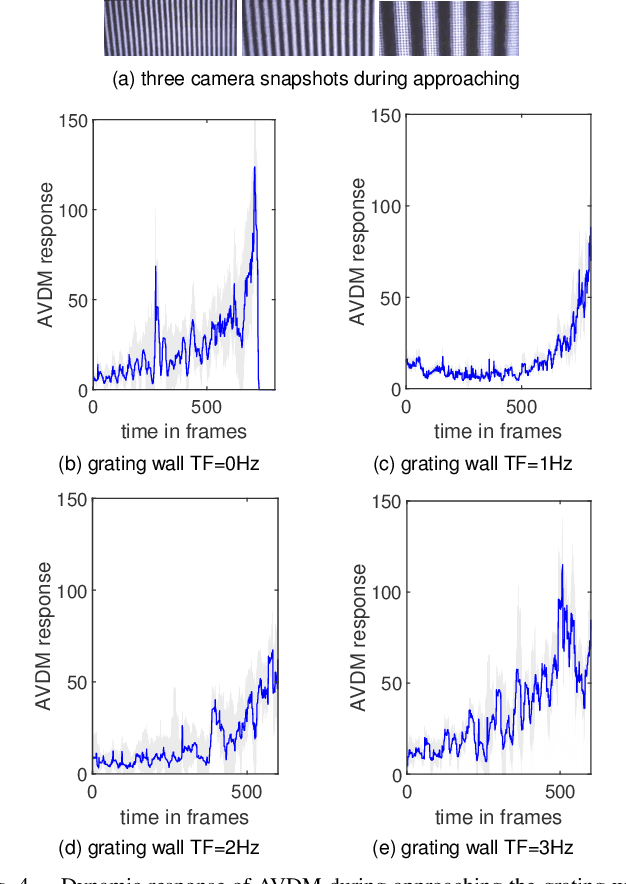
Visual dynamic complexity is a ubiquitous, hidden attribute of the visual world that every dynamic vision system is faced with. However, it is implicit and intractable which has never been quantitatively described due to the difficulty in defending temporal features correlated to spatial image complexity. To fill this vacancy, we propose a novel bio-robotic approach to profile visual dynamic complexity which can be used as a new metric. Here we apply a state-of-the-art brain-inspired motion detection neural network model to explicitly profile such complexity associated with spatial-temporal frequency (SF-TF) of visual scene. This model is for the first time implemented in an autonomous micro-mobile robot which navigates freely in an arena with visual walls displaying moving sine-wave grating or cluttered natural scene. The neural dynamic response can make reasonable prediction on surrounding complexity since it can be mapped monotonically to varying SF-TF of visual scene. The experiments show this approach is flexible to different visual scenes for profiling the dynamic complexity. We also use this metric as a predictor to investigate the boundary of another collision detection visual system performing in changing environment with increasing dynamic complexity. This research demonstrates a new paradigm of using biologically plausible visual processing scheme to estimate dynamic complexity of visual scene from both spatial and temporal perspectives, which could be beneficial to predicting input complexity when evaluating dynamic vision systems.
Attention and Prediction Guided Motion Detection for Low-Contrast Small Moving Targets
May 08, 2021



Small target motion detection within complex natural environments is an extremely challenging task for autonomous robots. Surprisingly, the visual systems of insects have evolved to be highly efficient in detecting mates and tracking prey, even though targets are as small as a few pixels in their visual fields. The excellent sensitivity to small target motion relies on a class of specialized neurons called small target motion detectors (STMDs). However, existing STMD-based models are heavily dependent on visual contrast and perform poorly in complex natural environments where small targets generally exhibit extremely low contrast against neighbouring backgrounds. In this paper, we develop an attention and prediction guided visual system to overcome this limitation. The developed visual system comprises three main subsystems, namely, an attention module, an STMD-based neural network, and a prediction module. The attention module searches for potential small targets in the predicted areas of the input image and enhances their contrast against complex background. The STMD-based neural network receives the contrast-enhanced image and discriminates small moving targets from background false positives. The prediction module foresees future positions of the detected targets and generates a prediction map for the attention module. The three subsystems are connected in a recurrent architecture allowing information to be processed sequentially to activate specific areas for small target detection. Extensive experiments on synthetic and real-world datasets demonstrate the effectiveness and superiority of the proposed visual system for detecting small, low-contrast moving targets against complex natural environments.
Does Time-Delay Feedback Matter to Small Target Motion Detection Against Complex Dynamic Environments?
Dec 29, 2019
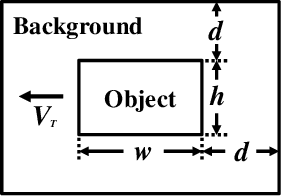
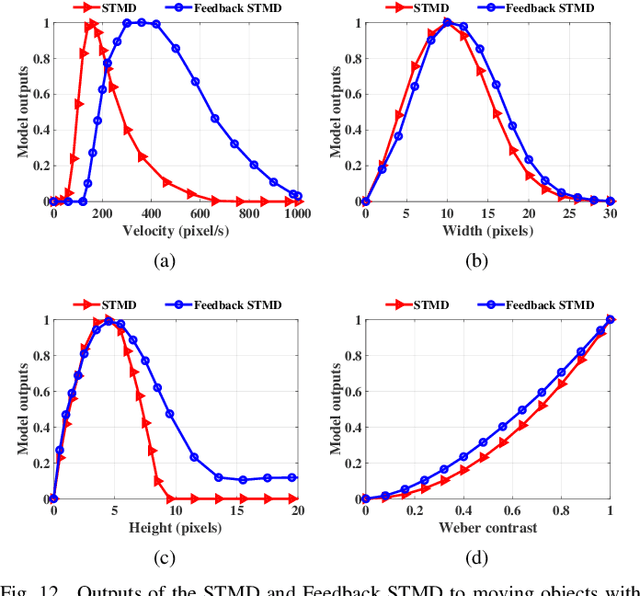
Discriminating small moving objects in complex visual environments is a significant challenge for autonomous micro robots that are generally limited in computational power. Relying on well-evolved visual systems, flying insects can effortlessly detect mates and track prey in rapid pursuits, despite target sizes as small as a few pixels in the visual field. Such exquisite sensitivity for small target motion is known to be supported by a class of specialized neurons named as small target motion detectors (STMDs). The existing STMD-based models normally consist of four sequentially arranged neural layers interconnected through feedforward loops to extract motion information about small targets from raw visual inputs. However, feedback loop, another important regulatory circuit for motion perception, has not been investigated in the STMD pathway and its functional roles for small target motion detection are not clear. In this paper, we assume the existence of the feedback and propose a STMD-based visual system with feedback connection (Feedback STMD), where the system output is temporally delayed, then fed back to lower layers to mediate neural responses. We compare the properties of the visual system with and without the time-delay feedback loop, and discuss its effect on small target motion detection. The experimental results suggest that the Feedback STMD prefers fast-moving small targets, while significantly suppresses those background features moving at lower velocities.
A Robust Visual System for Small Target Motion Detection Against Cluttered Moving Backgrounds
Apr 08, 2019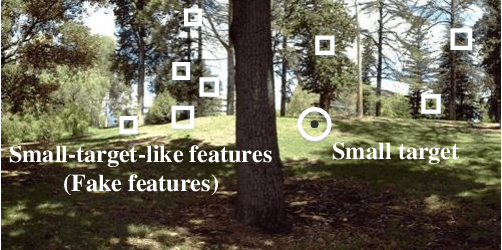
Monitoring small objects against cluttered moving backgrounds is a huge challenge to future robotic vision systems. As a source of inspiration, insects are quite apt at searching for mates and tracking prey -- which always appear as small dim speckles in the visual field. The exquisite sensitivity of insects for small target motion, as revealed recently, is coming from a class of specific neurons called small target motion detectors (STMDs). Although a few STMD-based models have been proposed, these existing models only use motion information for small target detection and cannot discriminate small targets from small-target-like background features (named as fake features). To address this problem, this paper proposes a novel visual system model (STMD+) for small target motion detection, which is composed of four subsystems -- ommatidia, motion pathway, contrast pathway and mushroom body. Compared to existing STMD-based models, the additional contrast pathway extracts directional contrast from luminance signals to eliminate false positive background motion. The directional contrast and the extracted motion information by the motion pathway are integrated in the mushroom body for small target discrimination. Extensive experiments showed the significant and consistent improvements of the proposed visual system model over existing STMD-based models against fake features.
Constant Angular Velocity Regulation for Visually Guided Terrain Following
Apr 04, 2019
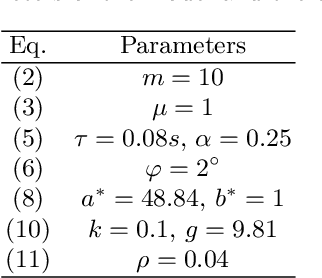
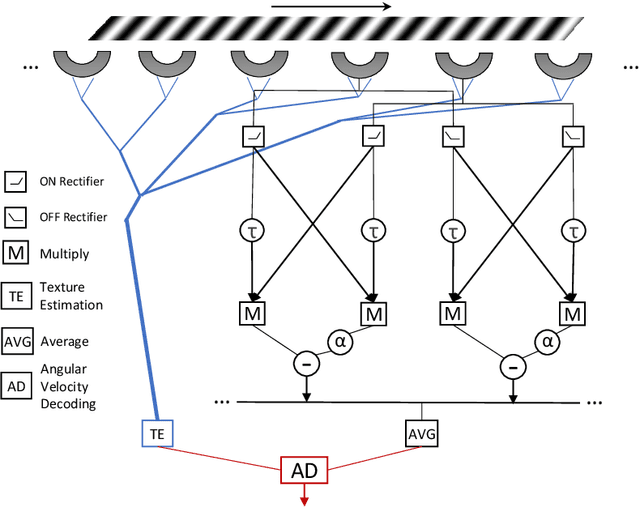
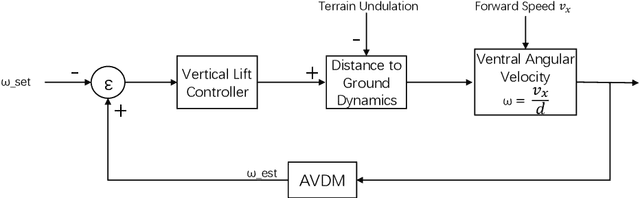
Insects use visual cues to control their flight behaviours. By estimating the angular velocity of the visual stimuli and regulating it to a constant value, honeybees can perform a terrain following task which keeps the certain height above the undulated ground. For mimicking this behaviour in a bio-plausible computation structure, this paper presents a new angular velocity decoding model based on the honeybee's behavioural experiments. The model consists of three parts, the texture estimation layer for spatial information extraction, the motion detection layer for temporal information extraction and the decoding layer combining information from pervious layers to estimate the angular velocity. Compared to previous methods on this field, the proposed model produces responses largely independent of the spatial frequency and contrast in grating experiments. The angular velocity based control scheme is proposed to implement the model into a bee simulated by the game engine Unity. The perfect terrain following above patterned ground and successfully flying over irregular textured terrain show its potential for micro unmanned aerial vehicles' terrain following.
Visual Cue Integration for Small Target Motion Detection in Natural Cluttered Backgrounds
Mar 18, 2019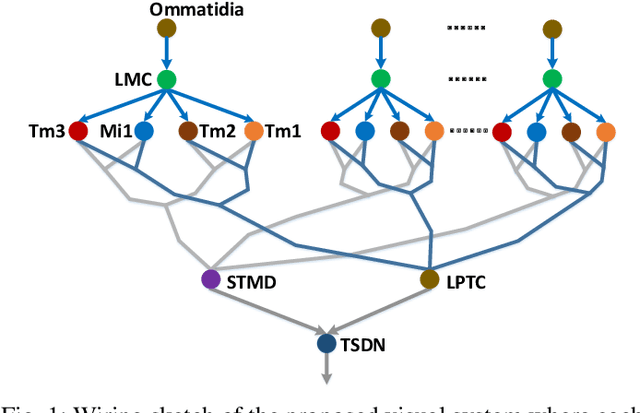
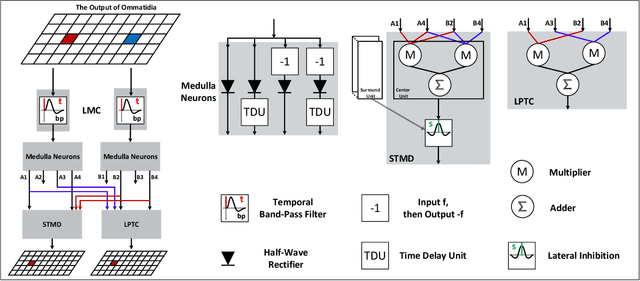
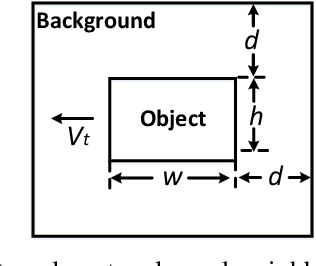
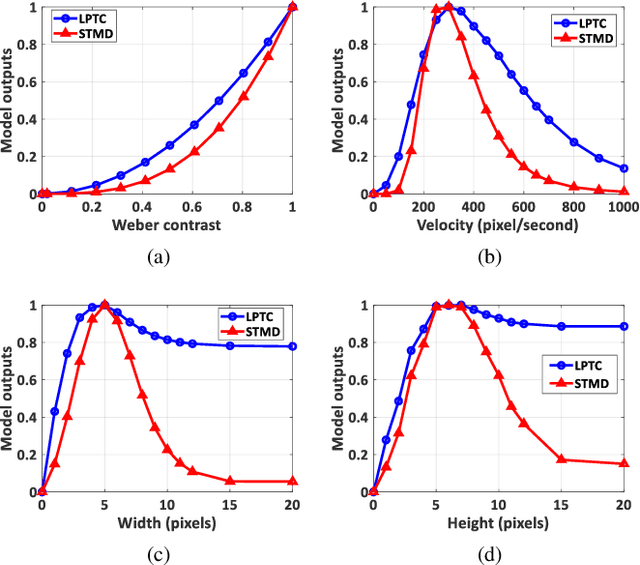
The robust detection of small targets against cluttered background is important for future artificial visual systems in searching and tracking applications. The insects' visual systems have demonstrated excellent ability to avoid predators, find prey or identify conspecifics - which always appear as small dim speckles in the visual field. Build a computational model of the insects' visual pathways could provide effective solutions to detect small moving targets. Although a few visual system models have been proposed, they only make use of small-field visual features for motion detection and their detection results often contain a number of false positives. To address this issue, we develop a new visual system model for small target motion detection against cluttered moving backgrounds. Compared to the existing models, the small-field and wide-field visual features are separately extracted by two motion-sensitive neurons to detect small target motion and background motion. These two types of motion information are further integrated to filter out false positives. Extensive experiments showed that the proposed model can outperform the existing models in terms of detection rates.
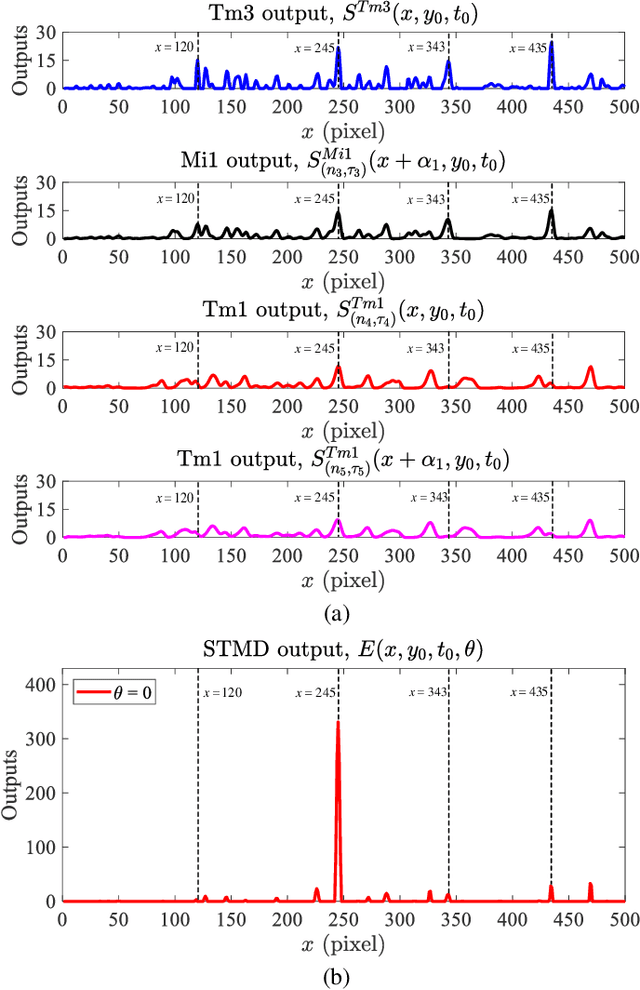
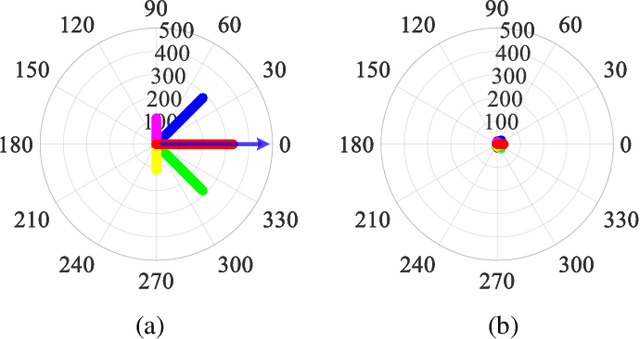
A Directionally Selective Small Target Motion Detecting Visual Neural Network in Cluttered Backgrounds
Sep 29, 2018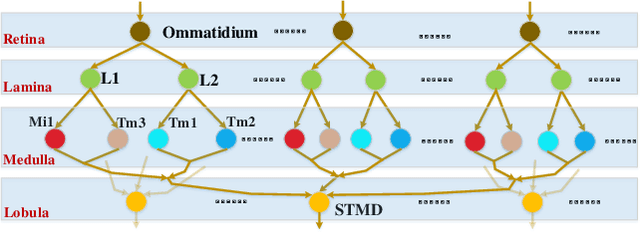
Discriminating targets moving against a cluttered background is a huge challenge, let alone detecting a target as small as one or a few pixels and tracking it in flight. In the fly's visual system, a class of specific neurons, called small target motion detectors (STMDs), have been identified as showing exquisite selectivity for small target motion. Some of the STMDs have also demonstrated directional selectivity which means these STMDs respond strongly only to their preferred motion direction. Directional selectivity is an important property of these STMD neurons which could contribute to tracking small targets such as mates in flight. However, little has been done on systematically modeling these directional selective STMD neurons. In this paper, we propose a directional selective STMD-based neural network (DSTMD) for small target detection in a cluttered background. In the proposed neural network, a new correlation mechanism is introduced for direction selectivity via correlating signals relayed from two pixels. Then, a lateral inhibition mechanism is implemented on the spatial field for size selectivity of STMD neurons. Extensive experiments showed that the proposed neural network not only is in accord with current biological findings, i.e. showing directional preferences, but also worked reliably in detecting small targets against cluttered backgrounds.