 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProfiling Visual Dynamic Complexity Using a Bio-Robotic Approach
May 20, 2021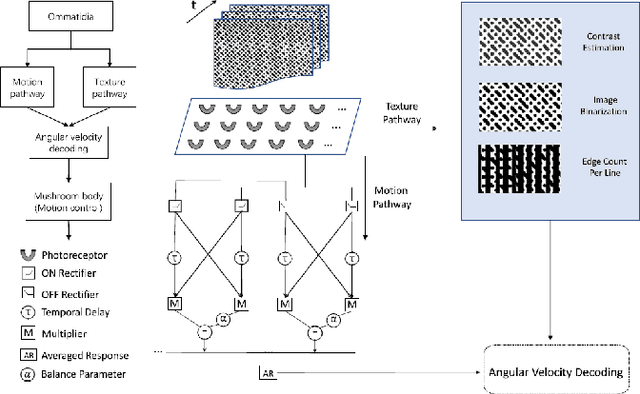
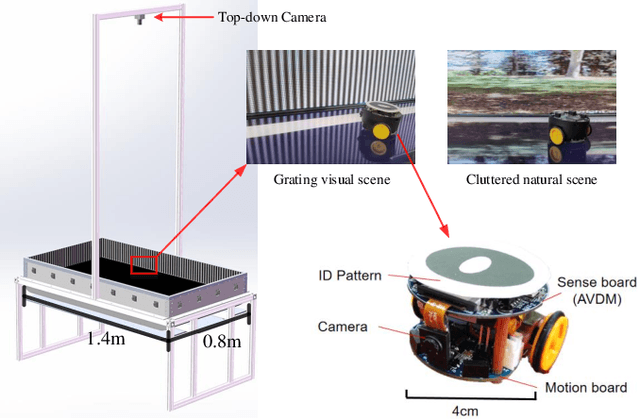
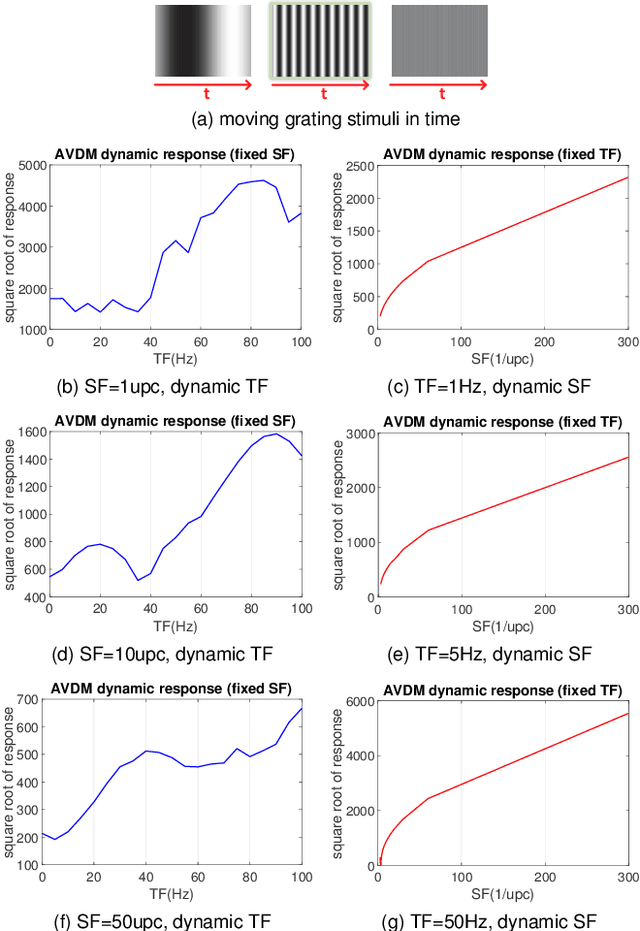
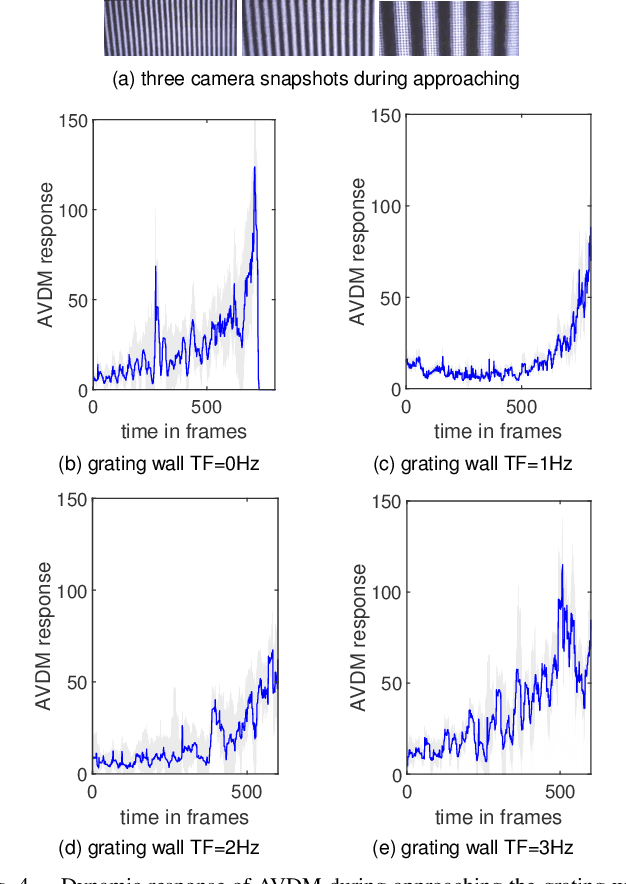
Visual dynamic complexity is a ubiquitous, hidden attribute of the visual world that every dynamic vision system is faced with. However, it is implicit and intractable which has never been quantitatively described due to the difficulty in defending temporal features correlated to spatial image complexity. To fill this vacancy, we propose a novel bio-robotic approach to profile visual dynamic complexity which can be used as a new metric. Here we apply a state-of-the-art brain-inspired motion detection neural network model to explicitly profile such complexity associated with spatial-temporal frequency (SF-TF) of visual scene. This model is for the first time implemented in an autonomous micro-mobile robot which navigates freely in an arena with visual walls displaying moving sine-wave grating or cluttered natural scene. The neural dynamic response can make reasonable prediction on surrounding complexity since it can be mapped monotonically to varying SF-TF of visual scene. The experiments show this approach is flexible to different visual scenes for profiling the dynamic complexity. We also use this metric as a predictor to investigate the boundary of another collision detection visual system performing in changing environment with increasing dynamic complexity. This research demonstrates a new paradigm of using biologically plausible visual processing scheme to estimate dynamic complexity of visual scene from both spatial and temporal perspectives, which could be beneficial to predicting input complexity when evaluating dynamic vision systems.
ColCOS$Φ$: A Multiple Pheromone Communication System for Swarm Robotics and Social Insects Research
Jun 05, 2019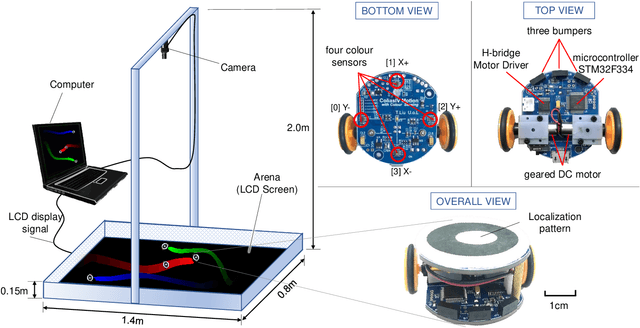
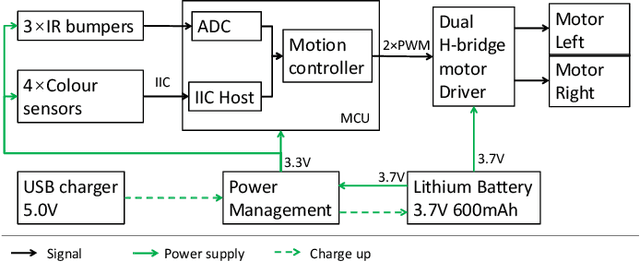
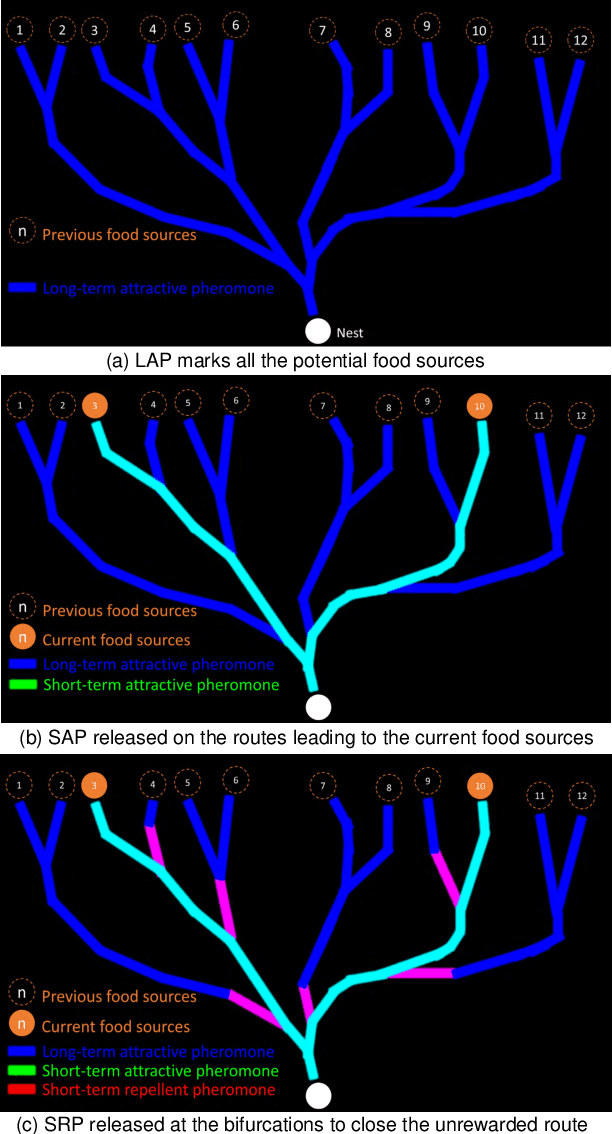
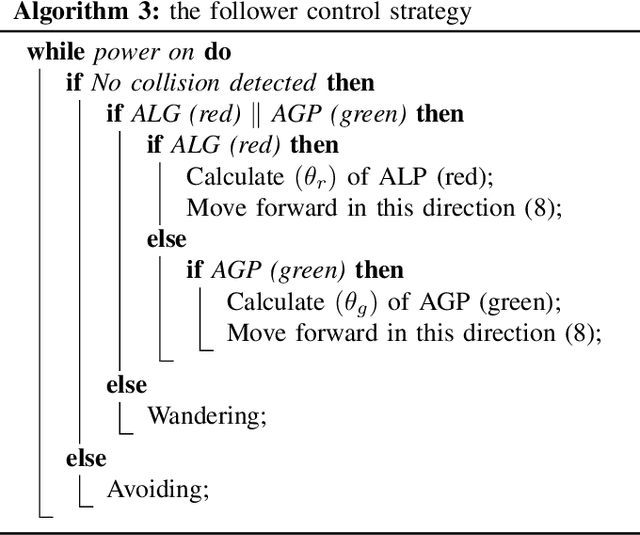
In the last few decades we have witnessed how the pheromone of social insect has become a rich inspiration source of swarm robotics. By utilising the virtual pheromone in physical swarm robot system to coordinate individuals and realise direct/indirect inter-robot communications like the social insect, stigmergic behaviour has emerged. However, many studies only take one single pheromone into account in solving swarm problems, which is not the case in real insects. In the real social insect world, diverse behaviours, complex collective performances and flexible transition from one state to another are guided by different kinds of pheromones and their interactions. Therefore, whether multiple pheromone based strategy can inspire swarm robotics research, and inversely how the performances of swarm robots controlled by multiple pheromones bring inspirations to explain the social insects' behaviours will become an interesting question. Thus, to provide a reliable system to undertake the multiple pheromone study, in this paper, we specifically proposed and realised a multiple pheromone communication system called ColCOS$\Phi$. This system consists of a virtual pheromone sub-system wherein the multiple pheromone is represented by a colour image displayed on a screen, and the micro-robots platform designed for swarm robotics applications. Two case studies are undertaken to verify the effectiveness of this system: one is the multiple pheromone based on an ant's forage and another is the interactions of aggregation and alarm pheromones. The experimental results demonstrate the feasibility of ColCOS$\Phi$ and its great potential in directing swarm robotics and social insects research.