 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmergence of robust looming selectivity via coordinated inhibitory neural computations
Oct 01, 2025In the locust's lobula giant movement detector neural pathways, four categories of inhibition, i.e., global inhibition, self-inhibition, lateral inhibition, and feed-forward inhibition, have been functionally explored in the context of looming perception. However, their combined influence on shaping selectivity to looming motion remains unclear. Driven by recent physiological advancements, this paper offers new insights into the roles of these inhibitory mechanisms at multiple levels and scales in simulations, refining the specific selectivity for responding only to objects approaching the eyes while remaining unresponsive to other forms of movement. Within a feed-forward, multi-layer neural network framework, global inhibition, lateral inhibition, self-inhibition, and feed-forward inhibition are integrated. Global inhibition acts as an immediate feedback mechanism, normalising light intensities delivered by ommatidia, particularly addressing low-contrast looming. Self-inhibition, modelled numerically for the first time, suppresses translational motion. Lateral inhibition is formed by delayed local excitation spreading across a larger area. Notably, self-inhibition and lateral inhibition are sequential in time and are combined through feed-forward inhibition, which indicates the angular size subtended by moving objects. Together, these inhibitory processes attenuate motion-induced excitation at multiple levels and scales. This research suggests that self-inhibition may act earlier than lateral inhibition to rapidly reduce excitation in situ, thereby suppressing translational motion, and global inhibition can modulate excitation on a finer scale, enhancing selectivity in higher contrast range.
How Fly Neural Perception Mechanisms Enhance Visuomotor Control of Micro Robots
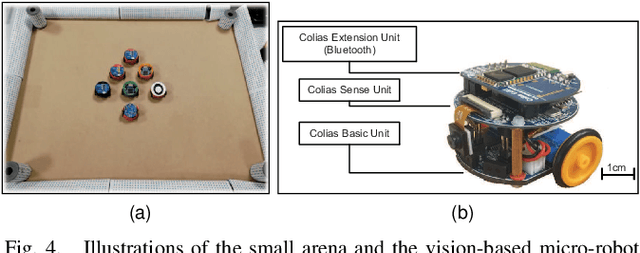
Sep 17, 2025Anyone who has tried to swat a fly has likely been frustrated by its remarkable agility.This ability stems from its visual neural perception system, particularly the collision-selective neurons within its small brain.For autonomous robots operating in complex and unfamiliar environments, achieving similar agility is highly desirable but often constrained by the trade-off between computational cost and performance.In this context, insect-inspired intelligence offers a parsimonious route to low-power, computationally efficient frameworks.In this paper, we propose an attention-driven visuomotor control strategy inspired by a specific class of fly visual projection neurons-the lobula plate/lobula column type-2 (LPLC2)-and their associated escape behaviors.To our knowledge, this represents the first embodiment of an LPLC2 neural model in the embedded vision of a physical mobile robot, enabling collision perception and reactive evasion.The model was simplified and optimized at 70KB in memory to suit the computational constraints of a vision-based micro robot, the Colias, while preserving key neural perception mechanisms.We further incorporated multi-attention mechanisms to emulate the distributed nature of LPLC2 responses, allowing the robot to detect and react to approaching targets both rapidly and selectively.We systematically evaluated the proposed method against a state-of-the-art locust-inspired collision detection model.Results showed that the fly-inspired visuomotor model achieved comparable robustness, at success rate of 96.1% in collision detection while producing more adaptive and elegant evasive maneuvers.Beyond demonstrating an effective collision-avoidance strategy, this work highlights the potential of fly-inspired neural models for advancing research into collective behaviors in insect intelligence.
Dynamic Neural Field Modeling of Visual Contrast for Perceiving Incoherent Looming
Apr 06, 2025Amari's Dynamic Neural Field (DNF) framework provides a brain-inspired approach to modeling the average activation of neuronal groups. Leveraging a single field, DNF has become a promising foundation for low-energy looming perception module in robotic applications. However, the previous DNF methods face significant challenges in detecting incoherent or inconsistent looming features--conditions commonly encountered in real-world scenarios, such as collision detection in rainy weather. Insights from the visual systems of fruit flies and locusts reveal encoding ON/OFF visual contrast plays a critical role in enhancing looming selectivity. Additionally, lateral excitation mechanism potentially refines the responses of loom-sensitive neurons to both coherent and incoherent stimuli. Together, these offer valuable guidance for improving looming perception models. Building on these biological evidence, we extend the previous single-field DNF framework by incorporating the modeling of ON/OFF visual contrast, each governed by a dedicated DNF. Lateral excitation within each ON/OFF-contrast field is formulated using a normalized Gaussian kernel, and their outputs are integrated in the Summation field to generate collision alerts. Experimental evaluations show that the proposed model effectively addresses incoherent looming detection challenges and significantly outperforms state-of-the-art locust-inspired models. It demonstrates robust performance across diverse stimuli, including synthetic rain effects, underscoring its potential for reliable looming perception in complex, noisy environments with inconsistent visual cues.
Attention-Driven LPLC2 Neural Ensemble Model for Multi-Target Looming Detection and Localization
Apr 06, 2025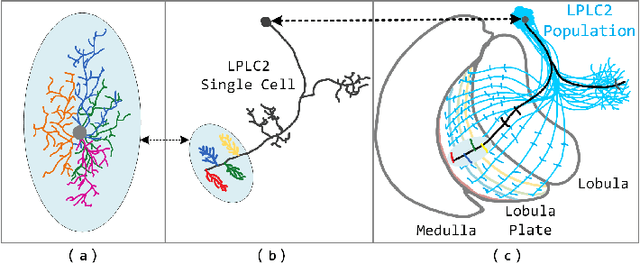



Lobula plate/lobula columnar, type 2 (LPLC2) visual projection neurons in the fly's visual system possess highly looming-selective properties, making them ideal for developing artificial collision detection systems. The four dendritic branches of individual LPLC2 neurons, each tuned to specific directional motion, enhance the robustness of looming detection by utilizing radial motion opponency. Existing models of LPLC2 neurons either concentrate on individual cells to detect centroid-focused expansion or utilize population-voting strategies to obtain global collision information. However, their potential for addressing multi-target collision scenarios remains largely untapped. In this study, we propose a numerical model for LPLC2 populations, leveraging a bottom-up attention mechanism driven by motion-sensitive neural pathways to generate attention fields (AFs). This integration of AFs with highly nonlinear LPLC2 responses enables precise and continuous detection of multiple looming objects emanating from any region of the visual field. We began by conducting comparative experiments to evaluate the proposed model against two related models, highlighting its unique characteristics. Next, we tested its ability to detect multiple targets in dynamic natural scenarios. Finally, we validated the model using real-world video data collected by aerial robots. Experimental results demonstrate that the proposed model excels in detecting, distinguishing, and tracking multiple looming targets with remarkable speed and accuracy. This advanced ability to detect and localize looming objects, especially in complex and dynamic environments, holds great promise for overcoming collision-detection challenges in mobile intelligent machines.
A Bio-Inspired Research Paradigm of Collision Perception Neurons Enabling Neuro-Robotic Integration: The LGMD Case
Jan 06, 2025Compared to human vision, insect visual systems excel at rapid and precise collision detection, despite relying on only tens of thousands of neurons organized through a few neuropils. This efficiency makes them an attractive model system for developing artificial collision-detecting systems. Specifically, researchers have identified collision-selective neurons in the locust's optic lobe, called lobula giant movement detectors (LGMDs), which respond specifically to approaching objects. Research upon LGMD neurons began in the early 1970s. Initially, due to their large size, these neurons were identified as motion detectors, but their role as looming detectors was recognized over time. Since then, progress in neuroscience, computational modeling of LGMD's visual neural circuits, and LGMD-based robotics has advanced in tandem, each field supporting and driving the others. Today, with a deeper understanding of LGMD neurons, LGMD-based models have significantly improved collision-free navigation in mobile robots including ground and aerial robots. This review highlights recent developments in LGMD research from the perspectives of neuroscience, computational modeling, and robotics. It emphasizes a biologically plausible research paradigm, where insights from neuroscience inform real-world applications, which would in turn validate and advance neuroscience. With strong support from extensive research and growing application demand, this paradigm has reached a mature stage and demonstrates versatility across different areas of neuroscience research, thereby enhancing our understanding of the interconnections between neuroscience, computational modeling, and robotics. Furthermore, other motion-sensitive neurons have also shown promising potential for adopting this research paradigm.
Profiling Visual Dynamic Complexity Using a Bio-Robotic Approach
May 20, 2021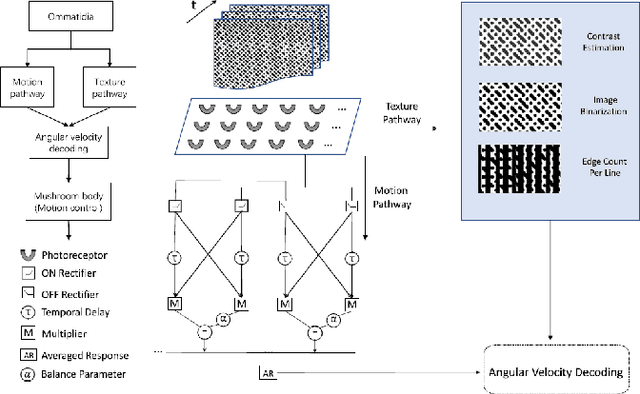
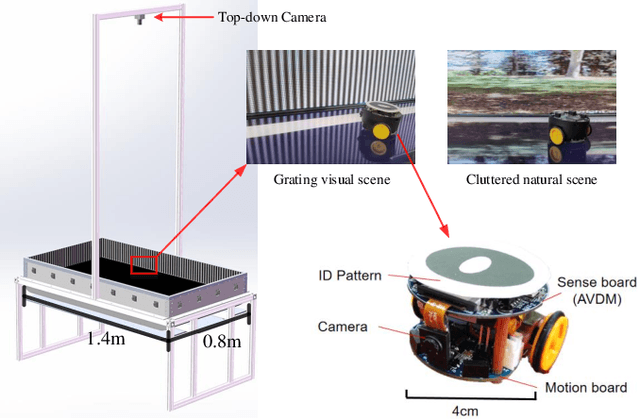
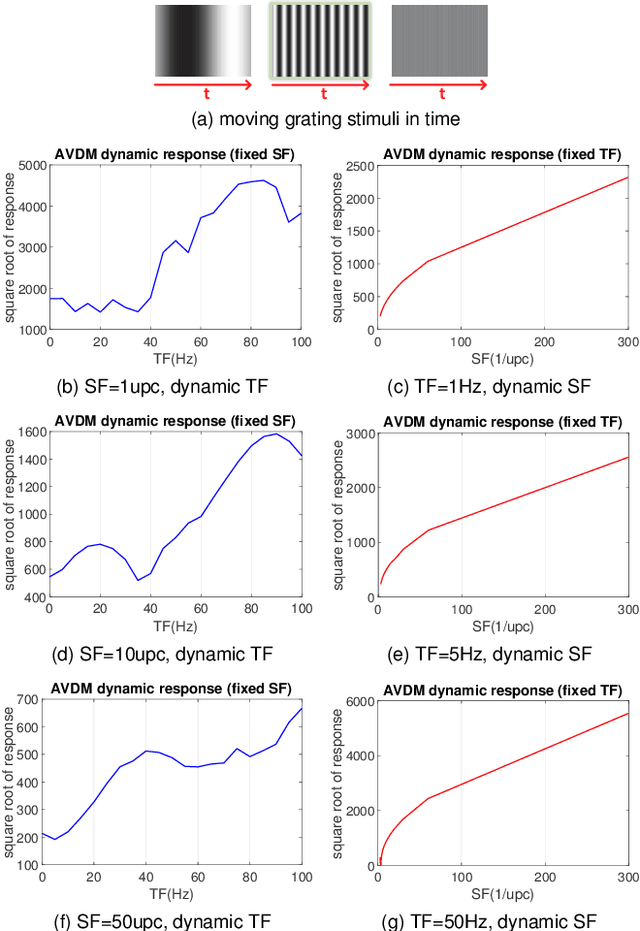
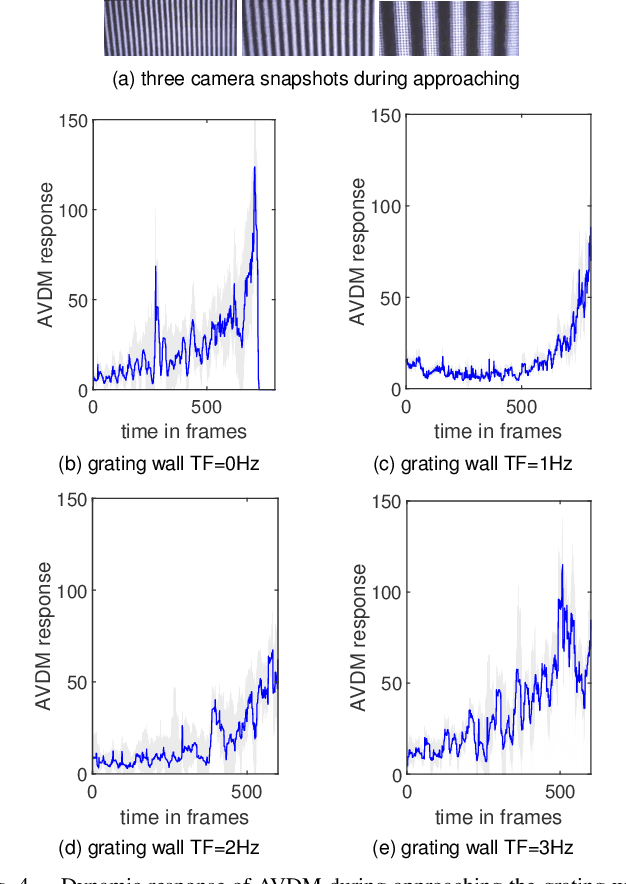
Visual dynamic complexity is a ubiquitous, hidden attribute of the visual world that every dynamic vision system is faced with. However, it is implicit and intractable which has never been quantitatively described due to the difficulty in defending temporal features correlated to spatial image complexity. To fill this vacancy, we propose a novel bio-robotic approach to profile visual dynamic complexity which can be used as a new metric. Here we apply a state-of-the-art brain-inspired motion detection neural network model to explicitly profile such complexity associated with spatial-temporal frequency (SF-TF) of visual scene. This model is for the first time implemented in an autonomous micro-mobile robot which navigates freely in an arena with visual walls displaying moving sine-wave grating or cluttered natural scene. The neural dynamic response can make reasonable prediction on surrounding complexity since it can be mapped monotonically to varying SF-TF of visual scene. The experiments show this approach is flexible to different visual scenes for profiling the dynamic complexity. We also use this metric as a predictor to investigate the boundary of another collision detection visual system performing in changing environment with increasing dynamic complexity. This research demonstrates a new paradigm of using biologically plausible visual processing scheme to estimate dynamic complexity of visual scene from both spatial and temporal perspectives, which could be beneficial to predicting input complexity when evaluating dynamic vision systems.
Modelling Drosophila Motion Vision Pathways for Decoding the Direction of Translating Objects Against Cluttered Moving Backgrounds
Jul 02, 2020
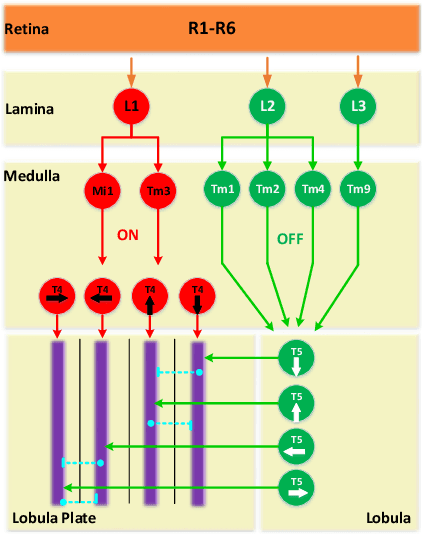
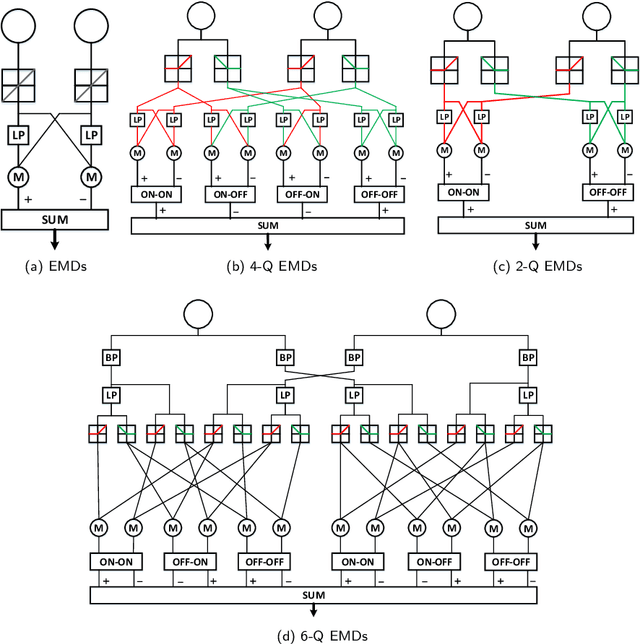
Decoding the direction of translating objects in front of cluttered moving backgrounds, accurately and efficiently, is still a challenging problem. In nature, lightweight and low-powered flying insects apply motion vision to detect a moving target in highly variable environments during flight, which are excellent paradigms to learn motion perception strategies. This paper investigates the fruit fly \textit{Drosophila} motion vision pathways and presents computational modelling based on cutting-edge physiological researches. The proposed visual system model features bio-plausible ON and OFF pathways, wide-field horizontal-sensitive (HS) and vertical-sensitive (VS) systems. The main contributions of this research are on two aspects: 1) the proposed model articulates the forming of both direction-selective (DS) and direction-opponent (DO) responses, revealed as principal features of motion perception neural circuits, in a feed-forward manner; 2) it also shows robust direction selectivity to translating objects in front of cluttered moving backgrounds, via the modelling of spatiotemporal dynamics including combination of motion pre-filtering mechanisms and ensembles of local correlators inside both the ON and OFF pathways, which works effectively to suppress irrelevant background motion or distractors, and to improve the dynamic response. Accordingly, the direction of translating objects is decoded as global responses of both the HS and VS systems with positive or negative output indicating preferred-direction (PD) or null-direction (ND) translation. The experiments have verified the effectiveness of the proposed neural system model, and demonstrated its responsive preference to faster-moving, higher-contrast and larger-size targets embedded in cluttered moving backgrounds.
Complementary Visual Neuronal Systems Model for Collision Sensing
Jun 11, 2020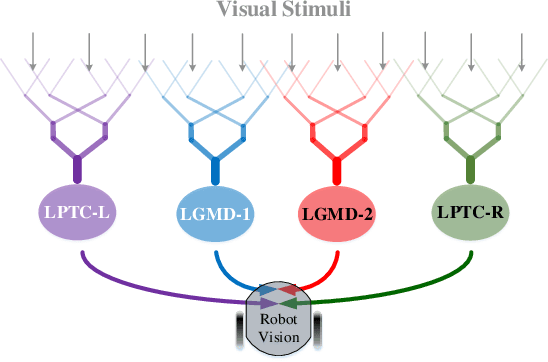
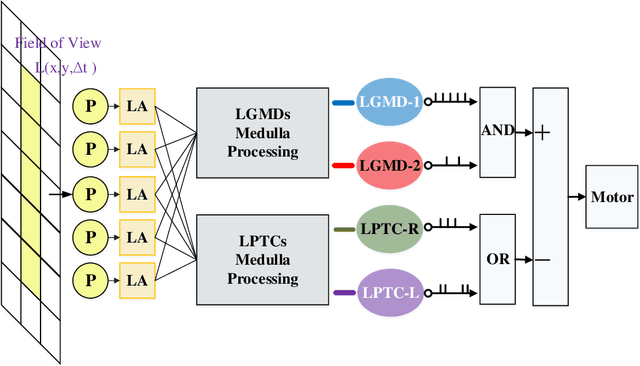
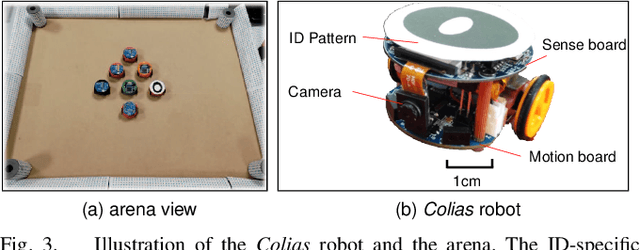
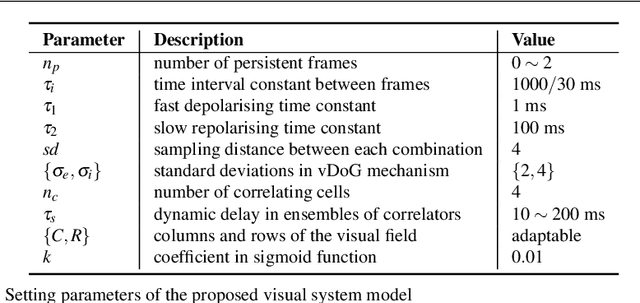
Inspired by insects' visual brains, this paper presents original modelling of a complementary visual neuronal systems model for real-time and robust collision sensing. Two categories of wide-field motion sensitive neurons, i.e., the lobula giant movement detectors (LGMDs) in locusts and the lobula plate tangential cells (LPTCs) in flies, have been studied, intensively. The LGMDs have specific selectivity to approaching objects in depth that threaten collision; whilst the LPTCs are only sensitive to translating objects in horizontal and vertical directions. Though each has been modelled and applied in various visual scenes including robot scenarios, little has been done on investigating their complementary functionality and selectivity when functioning together. To fill this vacancy, we introduce a hybrid model combining two LGMDs (LGMD-1 and LGMD-2) with horizontally (rightward and leftward) sensitive LPTCs (LPTC-R and LPTC-L) specialising in fast collision perception. With coordination and competition between different activated neurons, the proximity feature by frontal approaching stimuli can be largely sharpened up by suppressing translating and receding motions. The proposed method has been implemented in ground micro-mobile robots as embedded systems. The multi-robot experiments have demonstrated the effectiveness and robustness of the proposed model for frontal collision sensing, which outperforms previous single-type neuron computation methods against translating interference.
An LGMD Based Competitive Collision Avoidance Strategy for UAV
Apr 15, 2019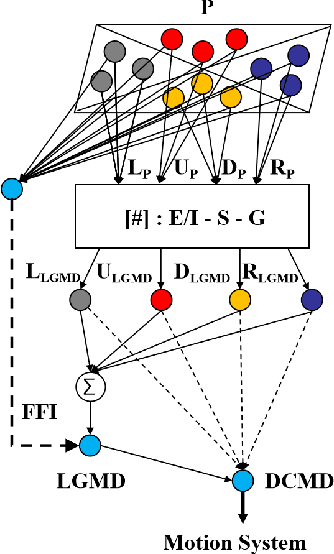
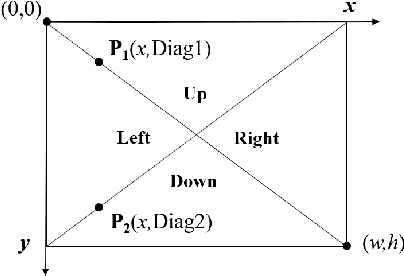
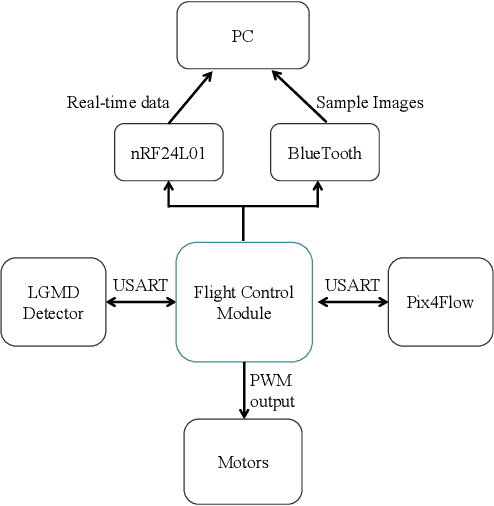
Building a reliable and efficient collision avoidance system for unmanned aerial vehicles (UAVs) is still a challenging problem. This research takes inspiration from locusts, which can fly in dense swarms for hundreds of miles without collision. In the locust's brain, a visual pathway of LGMD-DCMD (lobula giant movement detector and descending contra-lateral motion detector) has been identified as collision perception system guiding fast collision avoidance for locusts, which is ideal for designing artificial vision systems. However, there is very few works investigating its potential in real-world UAV applications. In this paper, we present an LGMD based competitive collision avoidance method for UAV indoor navigation. Compared to previous works, we divided the UAV's field of view into four subfields each handled by an LGMD neuron. Therefore, four individual competitive LGMDs (C-LGMD) compete for guiding the directional collision avoidance of UAV. With more degrees of freedom compared to ground robots and vehicles, the UAV can escape from collision along four cardinal directions (e.g. the object approaching from the left-side triggers a rightward shifting of the UAV). Our proposed method has been validated by both simulations and real-time quadcopter arena experiments.
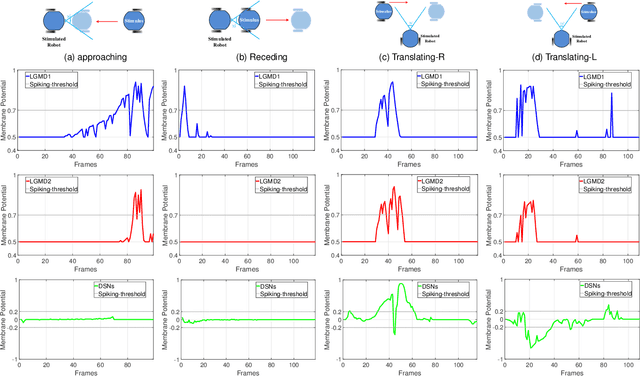
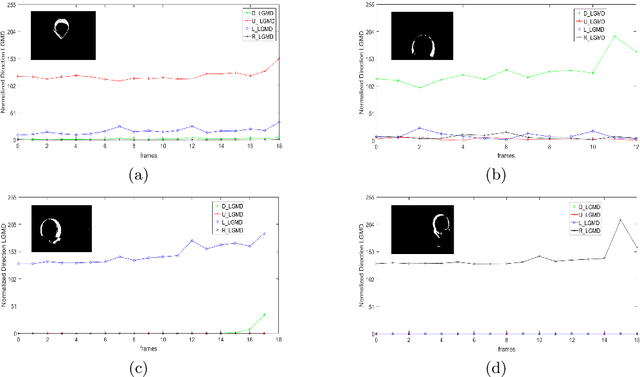
Synthetic Neural Vision System Design for Motion Pattern Recognition in Dynamic Robot Scenes
Apr 15, 2019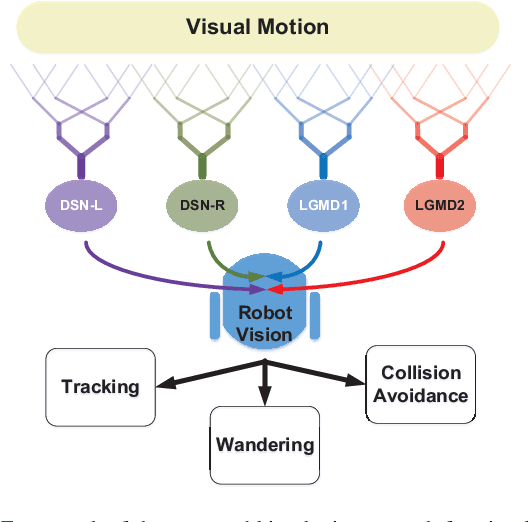
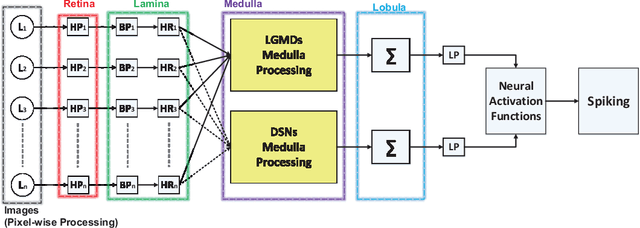
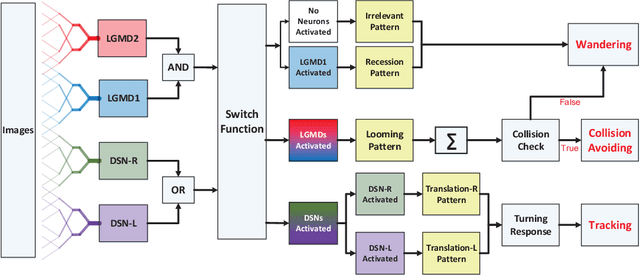
Insects have tiny brains but complicated visual systems for motion perception. A handful of insect visual neurons have been computationally modeled and successfully applied for robotics. How different neurons collaborate on motion perception, is an open question to date. In this paper, we propose a novel embedded vision system in autonomous micro-robots, to recognize motion patterns in dynamic robot scenes. Here, the basic motion patterns are categorized into movements of looming (proximity), recession, translation, and other irrelevant ones. The presented system is a synthetic neural network, which comprises two complementary sub-systems with four spiking neurons -- the lobula giant movement detectors (LGMD1 and LGMD2) in locusts for sensing looming and recession, and the direction selective neurons (DSN-R and DSN-L) in flies for translational motion extraction. Images are transformed to spikes via spatiotemporal computations towards a switch function and decision making mechanisms, in order to invoke proper robot behaviors amongst collision avoidance, tracking and wandering, in dynamic robot scenes. Our robot experiments demonstrated two main contributions: (1) This neural vision system is effective to recognize the basic motion patterns corresponding to timely and proper robot behaviors in dynamic scenes. (2) The arena tests with multi-robots demonstrated the effectiveness in recognizing more abundant motion features for collision detection, which is a great improvement compared with former studies.