 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConstant Angular Velocity Regulation for Visually Guided Terrain Following
Paper and Code
Apr 04, 2019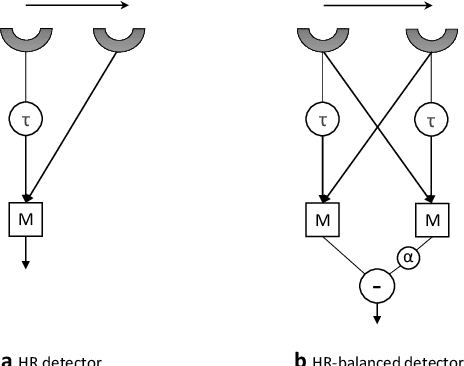
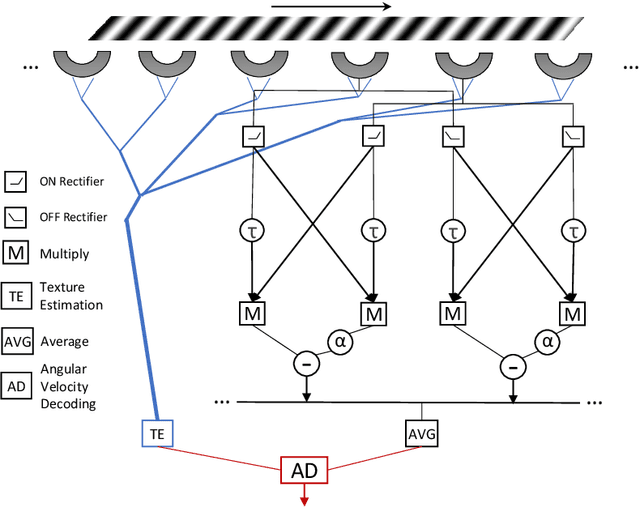
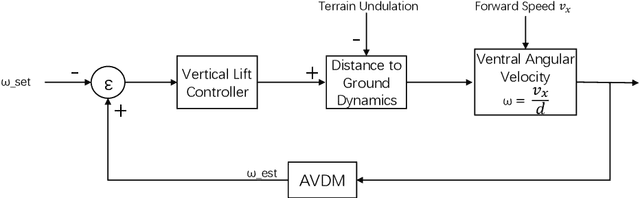
Insects use visual cues to control their flight behaviours. By estimating the angular velocity of the visual stimuli and regulating it to a constant value, honeybees can perform a terrain following task which keeps the certain height above the undulated ground. For mimicking this behaviour in a bio-plausible computation structure, this paper presents a new angular velocity decoding model based on the honeybee's behavioural experiments. The model consists of three parts, the texture estimation layer for spatial information extraction, the motion detection layer for temporal information extraction and the decoding layer combining information from pervious layers to estimate the angular velocity. Compared to previous methods on this field, the proposed model produces responses largely independent of the spatial frequency and contrast in grating experiments. The angular velocity based control scheme is proposed to implement the model into a bee simulated by the game engine Unity. The perfect terrain following above patterned ground and successfully flying over irregular textured terrain show its potential for micro unmanned aerial vehicles' terrain following.