 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLRR: Language-Driven Resamplable Continuous Representation against Adversarial Tracking Attacks
Apr 09, 2024



Visual object tracking plays a critical role in visual-based autonomous systems, as it aims to estimate the position and size of the object of interest within a live video. Despite significant progress made in this field, state-of-the-art (SOTA) trackers often fail when faced with adversarial perturbations in the incoming frames. This can lead to significant robustness and security issues when these trackers are deployed in the real world. To achieve high accuracy on both clean and adversarial data, we propose building a spatial-temporal continuous representation using the semantic text guidance of the object of interest. This novel continuous representation enables us to reconstruct incoming frames to maintain semantic and appearance consistency with the object of interest and its clean counterparts. As a result, our proposed method successfully defends against different SOTA adversarial tracking attacks while maintaining high accuracy on clean data. In particular, our method significantly increases tracking accuracy under adversarial attacks with around 90% relative improvement on UAV123, which is even higher than the accuracy on clean data.
DARTSRepair: Core-failure-set Guided DARTS for Network Robustness to Common Corruptions
Sep 21, 2022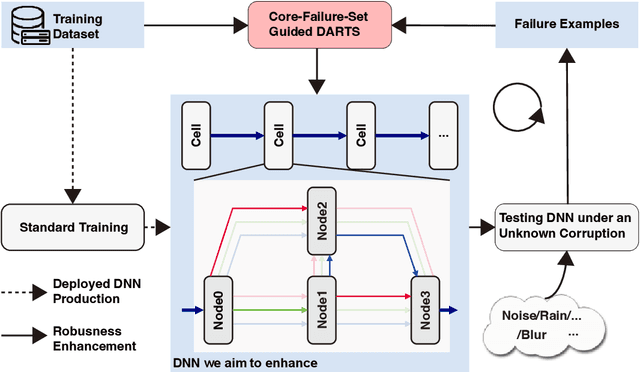

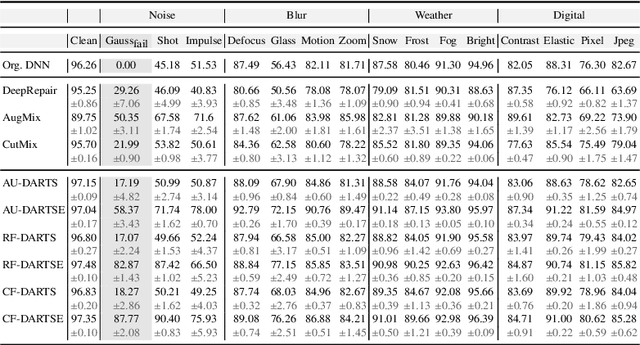
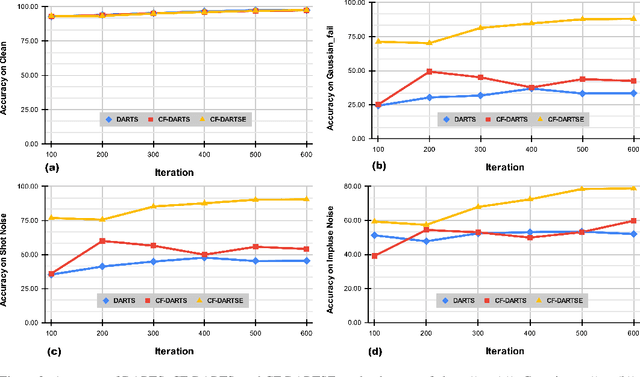
Network architecture search (NAS), in particular the differentiable architecture search (DARTS) method, has shown a great power to learn excellent model architectures on the specific dataset of interest. In contrast to using a fixed dataset, in this work, we focus on a different but important scenario for NAS: how to refine a deployed network's model architecture to enhance its robustness with the guidance of a few collected and misclassified examples that are degraded by some real-world unknown corruptions having a specific pattern (e.g., noise, blur, etc.). To this end, we first conduct an empirical study to validate that the model architectures can be definitely related to the corruption patterns. Surprisingly, by just adding a few corrupted and misclassified examples (e.g., $10^3$ examples) to the clean training dataset (e.g., $5.0 \times 10^4$ examples), we can refine the model architecture and enhance the robustness significantly. To make it more practical, the key problem, i.e., how to select the proper failure examples for the effective NAS guidance, should be carefully investigated. Then, we propose a novel core-failure-set guided DARTS that embeds a K-center-greedy algorithm for DARTS to select suitable corrupted failure examples to refine the model architecture. We use our method for DARTS-refined DNNs on the clean as well as 15 corruptions with the guidance of four specific real-world corruptions. Compared with the state-of-the-art NAS as well as data-augmentation-based enhancement methods, our final method can achieve higher accuracy on both corrupted datasets and the original clean dataset. On some of the corruption patterns, we can achieve as high as over 45% absolute accuracy improvements.
ArchRepair: Block-Level Architecture-Oriented Repairing for Deep Neural Networks
Dec 11, 2021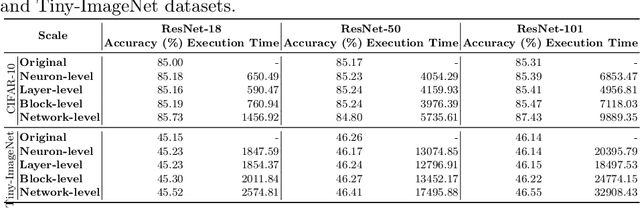

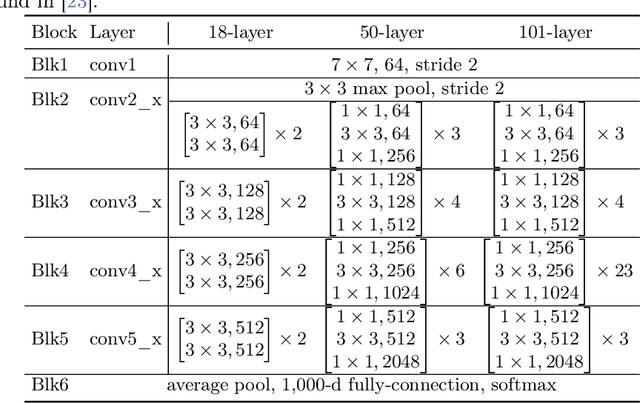
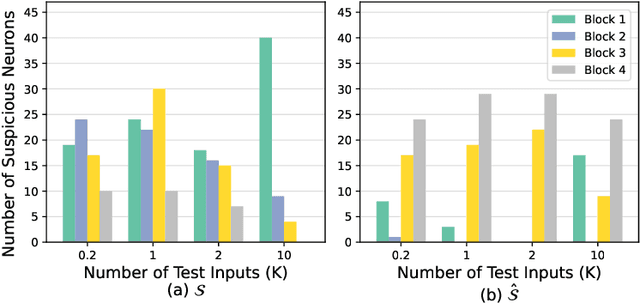
Over the past few years, deep neural networks (DNNs) have achieved tremendous success and have been continuously applied in many application domains. However, during the practical deployment in the industrial tasks, DNNs are found to be erroneous-prone due to various reasons such as overfitting, lacking robustness to real-world corruptions during practical usage. To address these challenges, many recent attempts have been made to repair DNNs for version updates under practical operational contexts by updating weights (i.e., network parameters) through retraining, fine-tuning, or direct weight fixing at a neural level. In this work, as the first attempt, we initiate to repair DNNs by jointly optimizing the architecture and weights at a higher (i.e., block) level. We first perform empirical studies to investigate the limitation of whole network-level and layer-level repairing, which motivates us to explore a novel repairing direction for DNN repair at the block level. To this end, we first propose adversarial-aware spectrum analysis for vulnerable block localization that considers the neurons' status and weights' gradients in blocks during the forward and backward processes, which enables more accurate candidate block localization for repairing even under a few examples. Then, we further propose the architecture-oriented search-based repairing that relaxes the targeted block to a continuous repairing search space at higher deep feature levels. By jointly optimizing the architecture and weights in that space, we can identify a much better block architecture. We implement our proposed repairing techniques as a tool, named ArchRepair, and conduct extensive experiments to validate the proposed method. The results show that our method can not only repair but also enhance accuracy & robustness, outperforming the state-of-the-art DNN repair techniques.