 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHigh Dimensional Data Decomposition for Anomaly Detection of Textured Images
Dec 23, 2025In the realm of diverse high-dimensional data, images play a significant role across various processes of manufacturing systems where efficient image anomaly detection has emerged as a core technology of utmost importance. However, when applied to textured defect images, conventional anomaly detection methods have limitations including non-negligible misidentification, low robustness, and excessive reliance on large-scale and structured datasets. This paper proposes a texture basis integrated smooth decomposition (TBSD) approach, which is targeted at efficient anomaly detection in textured images with smooth backgrounds and sparse anomalies. Mathematical formulation of quasi-periodicity and its theoretical properties are investigated for image texture estimation. TBSD method consists of two principal processes: the first process learns the texture basis functions to effectively extract quasi-periodic texture patterns; the subsequent anomaly detection process utilizes that texture basis as prior knowledge to prevent texture misidentification and capture potential anomalies with high accuracy.The proposed method surpasses benchmarks with less misidentification, smaller training dataset requirement, and superior anomaly detection performance on both simulation and real-world datasets.
R^2-HGP: A Double-Regularized Gaussian Process for Heterogeneous Transfer Learning
Dec 11, 2025Multi-output Gaussian process (MGP) models have attracted significant attention for their flexibility and uncertainty-quantification capabilities, and have been widely adopted in multi-source transfer learning scenarios due to their ability to capture inter-task correlations. However, they still face several challenges in transfer learning. First, the input spaces of the source and target domains are often heterogeneous, which makes direct knowledge transfer difficult. Second, potential prior knowledge and physical information are typically ignored during heterogeneous transfer, hampering the utilization of domain-specific insights and leading to unstable mappings. Third, inappropriate information sharing among target and sources can easily lead to negative transfer. Traditional models fail to address these issues in a unified way. To overcome these limitations, this paper proposes a Double-Regularized Heterogeneous Gaussian Process framework (R^2-HGP). Specifically, a trainable prior probability mapping model is first proposed to align the heterogeneous input domains. The resulting aligned inputs are treated as latent variables, upon which a multi-source transfer GP model is constructed and the entire structure is integrated into a novel conditional variational autoencoder (CVAE) based framework. Physical insights is further incorporated as a regularization term to ensure that the alignment results adhere to known physical knowledge. Next, within the multi-source transfer GP model, a sparsity penalty is imposed on the transfer coefficients, enabling the model to adaptively select the most informative source outputs and suppress negative transfer. Extensive simulations and real-world engineering case studies validate the effectiveness of our R^2-HGP, demonstrating consistent superiority over state-of-the-art benchmarks across diverse evaluation metrics.
Local transfer learning Gaussian process modeling, with applications to surrogate modeling of expensive computer simulators
Oct 17, 2024

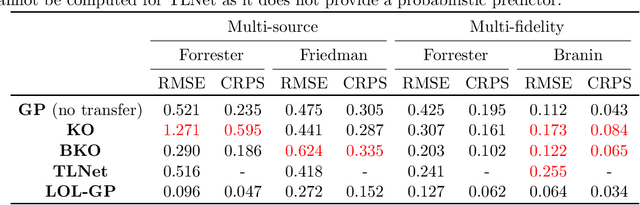

A critical bottleneck for scientific progress is the costly nature of computer simulations for complex systems. Surrogate models provide an appealing solution: such models are trained on simulator evaluations, then used to emulate and quantify uncertainty on the expensive simulator at unexplored inputs. In many applications, one often has available data on related systems. For example, in designing a new jet turbine, there may be existing studies on turbines with similar configurations. A key question is how information from such "source" systems can be transferred for effective surrogate training on the "target" system of interest. We thus propose a new LOcal transfer Learning Gaussian Process (LOL-GP) model, which leverages a carefully-designed Gaussian process to transfer such information for surrogate modeling. The key novelty of the LOL-GP is a latent regularization model, which identifies regions where transfer should be performed and regions where it should be avoided. This "local transfer" property is desirable in scientific systems: at certain parameters, such systems may behave similarly and thus transfer is beneficial; at other parameters, they may behave differently and thus transfer is detrimental. By accounting for local transfer, the LOL-GP can rectify a critical limitation of "negative transfer" in existing transfer learning models, where the transfer of information worsens predictive performance. We derive a Gibbs sampling algorithm for efficient posterior predictive sampling on the LOL-GP, for both the multi-source and multi-fidelity transfer settings. We then show, via a suite of numerical experiments and an application for jet turbine design, the improved surrogate performance of the LOL-GP over existing methods.
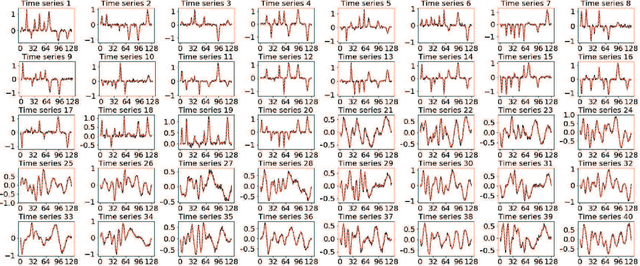
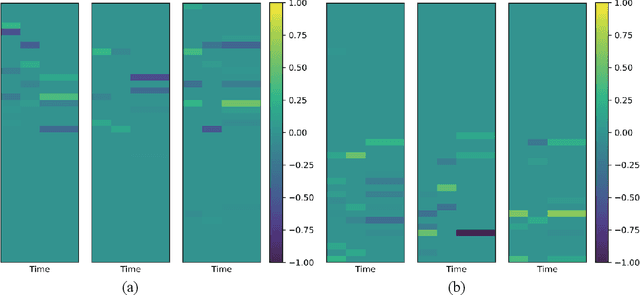
Generalized Time Warping Invariant Dictionary Learning for Time Series Classification and Clustering
Jun 30, 2023Dictionary learning is an effective tool for pattern recognition and classification of time series data. Among various dictionary learning techniques, the dynamic time warping (DTW) is commonly used for dealing with temporal delays, scaling, transformation, and many other kinds of temporal misalignments issues. However, the DTW suffers overfitting or information loss due to its discrete nature in aligning time series data. To address this issue, we propose a generalized time warping invariant dictionary learning algorithm in this paper. Our approach features a generalized time warping operator, which consists of linear combinations of continuous basis functions for facilitating continuous temporal warping. The integration of the proposed operator and the dictionary learning is formulated as an optimization problem, where the block coordinate descent method is employed to jointly optimize warping paths, dictionaries, and sparseness coefficients. The optimized results are then used as hyperspace distance measures to feed classification and clustering algorithms. The superiority of the proposed method in terms of dictionary learning, classification, and clustering is validated through ten sets of public datasets in comparing with various benchmark methods.
Failure-averse Active Learning for Physics-constrained Systems
Oct 27, 2021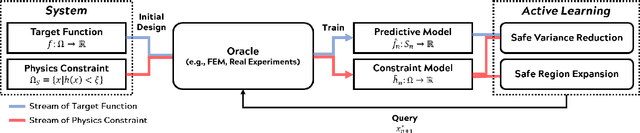
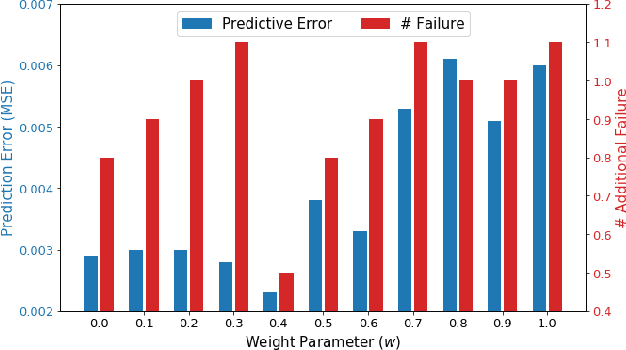
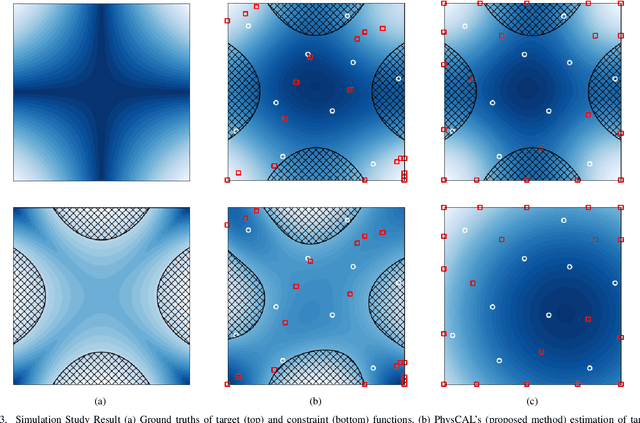
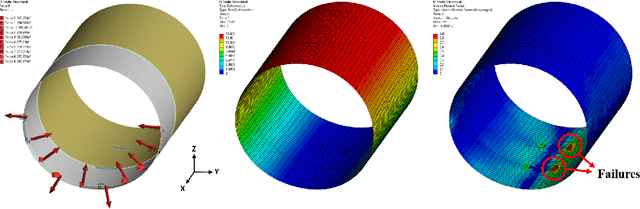
Active learning is a subfield of machine learning that is devised for design and modeling of systems with highly expensive sampling costs. Industrial and engineering systems are generally subject to physics constraints that may induce fatal failures when they are violated, while such constraints are frequently underestimated in active learning. In this paper, we develop a novel active learning method that avoids failures considering implicit physics constraints that govern the system. The proposed approach is driven by two tasks: the safe variance reduction explores the safe region to reduce the variance of the target model, and the safe region expansion aims to extend the explorable region exploiting the probabilistic model of constraints. The global acquisition function is devised to judiciously optimize acquisition functions of two tasks, and its theoretical properties are provided. The proposed method is applied to the composite fuselage assembly process with consideration of material failure using the Tsai-wu criterion, and it is able to achieve zero-failure without the knowledge of explicit failure regions.
Partitioned Active Learning for Heterogeneous Systems
May 14, 2021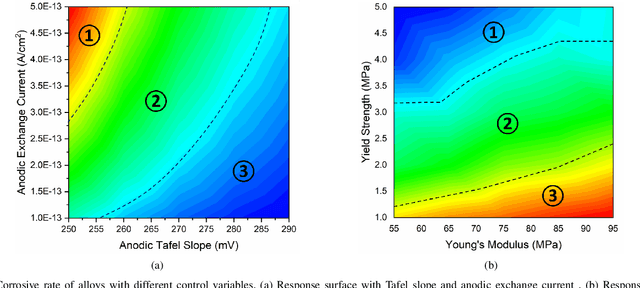
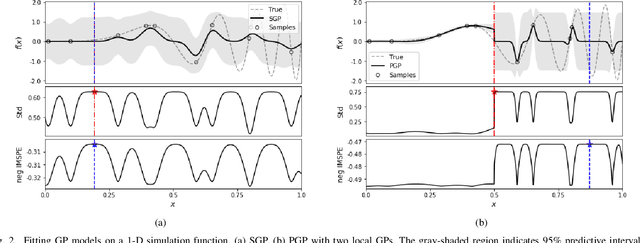
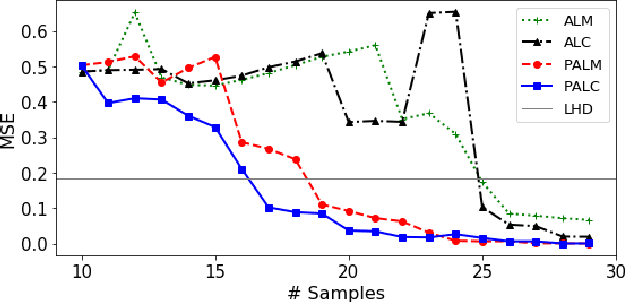
Cost-effective and high-precision surrogate modeling is a cornerstone of automated industrial and engineering systems. Active learning coupled with Gaussian process (GP) surrogate modeling is an indispensable tool for demanding and complex systems, while the existence of heterogeneity in underlying systems may adversely affect the modeling process. In order to improve the learning efficiency under the regime, we propose the partitioned active learning strategy established upon partitioned GP (PGP) modeling. Our strategy seeks the most informative design point for PGP modeling systematically in twosteps. The global searching scheme accelerates the exploration aspect of active learning by investigating the most uncertain design space, and the local searching exploits the active learning criterion induced by the local GP model. We also provide numerical remedies to alleviate the computational cost of active learning, thereby allowing the proposed method to incorporate a large amount of candidates. The proposed method is applied to numerical simulation and real world cases endowed with heterogeneities in which surrogate models are constructed to embed in (i) the cost-efficient automatic fuselage shape control system; and (ii) the optimal design system of tribocorrosion-resistant alloys. The results show that our approach outperforms benchmark methods.
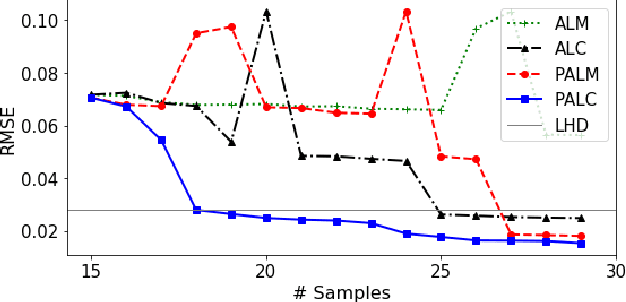
Neural Network Gaussian Process Considering Input Uncertainty for Composite Structures Assembly
Nov 21, 2020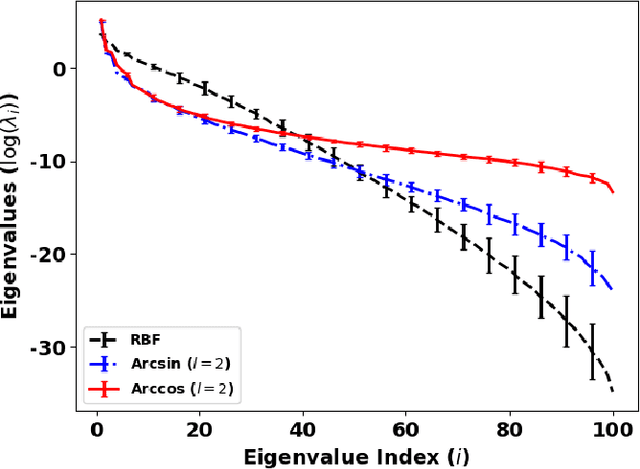
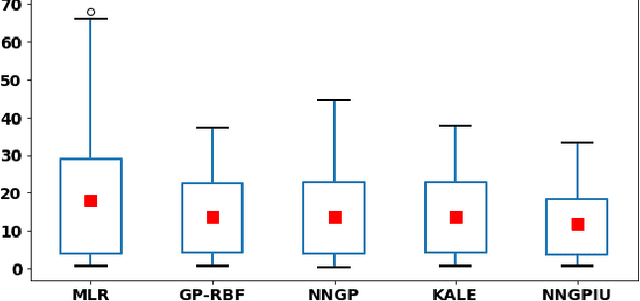
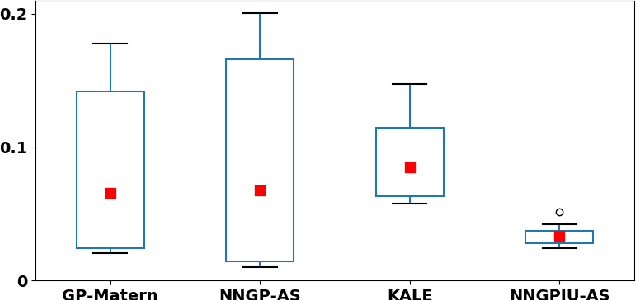
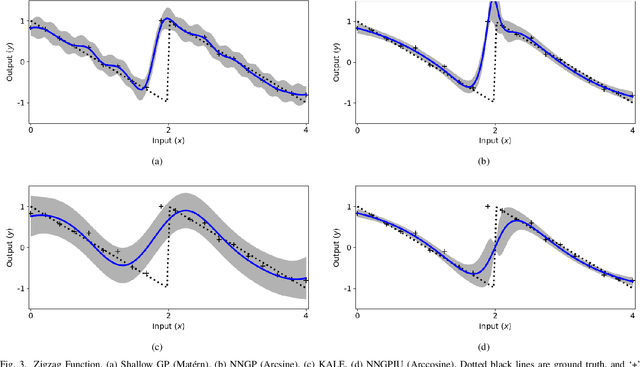
Developing machine learning enabled smart manufacturing is promising for composite structures assembly process. To improve production quality and efficiency of the assembly process, accurate predictive analysis on dimensional deviations and residual stress of the composite structures is required. The novel composite structures assembly involves two challenges: (i) the highly nonlinear and anisotropic properties of composite materials; and (ii) inevitable uncertainty in the assembly process. To overcome those problems, we propose a neural network Gaussian process model considering input uncertainty for composite structures assembly. Deep architecture of our model allows us to approximate a complex process better, and consideration of input uncertainty enables robust modeling with complete incorporation of the process uncertainty. Based on simulation and case study, the NNGPIU can outperform other benchmark methods when the response function is nonsmooth and nonlinear. Although we use composite structure assembly as an example, the proposed methodology can be applicable to other engineering systems with intrinsic uncertainties.
Online Structural Change-point Detection of High-dimensional Streaming Data via Dynamic Sparse Subspace Learning
Sep 29, 2020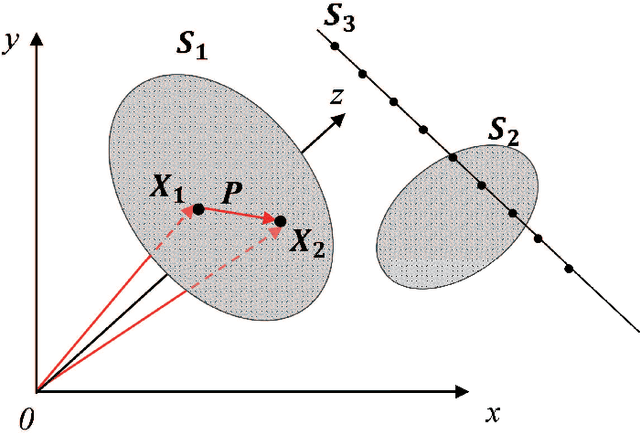

High-dimensional streaming data are becoming increasingly ubiquitous in many fields. They often lie in multiple low-dimensional subspaces, and the manifold structures may change abruptly on the time scale due to pattern shift or occurrence of anomalies. However, the problem of detecting the structural changes in a real-time manner has not been well studied. To fill this gap, we propose a dynamic sparse subspace learning (DSSL) approach for online structural change-point detection of high-dimensional streaming data. A novel multiple structural change-point model is proposed and it is shown to be equivalent to maximizing a posterior under certain conditions. The asymptotic properties of the estimators are investigated. The penalty coefficients in our model can be selected by AMDL criterion based on some historical data. An efficient Pruned Exact Linear Time (PELT) based method is proposed for online optimization and change-point detection. The effectiveness of the proposed method is demonstrated through a simulation study and a real case study using gesture data for motion tracking.