 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFailure-averse Active Learning for Physics-constrained Systems
Oct 27, 2021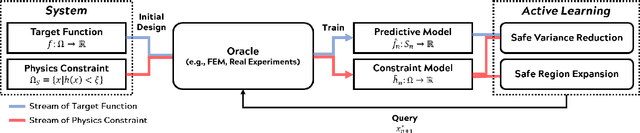
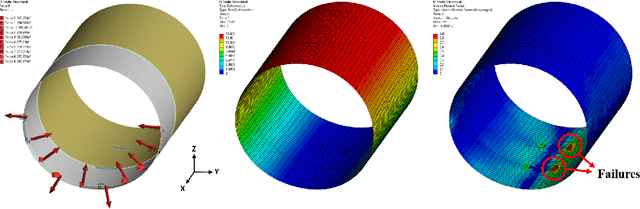
Active learning is a subfield of machine learning that is devised for design and modeling of systems with highly expensive sampling costs. Industrial and engineering systems are generally subject to physics constraints that may induce fatal failures when they are violated, while such constraints are frequently underestimated in active learning. In this paper, we develop a novel active learning method that avoids failures considering implicit physics constraints that govern the system. The proposed approach is driven by two tasks: the safe variance reduction explores the safe region to reduce the variance of the target model, and the safe region expansion aims to extend the explorable region exploiting the probabilistic model of constraints. The global acquisition function is devised to judiciously optimize acquisition functions of two tasks, and its theoretical properties are provided. The proposed method is applied to the composite fuselage assembly process with consideration of material failure using the Tsai-wu criterion, and it is able to achieve zero-failure without the knowledge of explicit failure regions.
Partitioned Active Learning for Heterogeneous Systems
May 14, 2021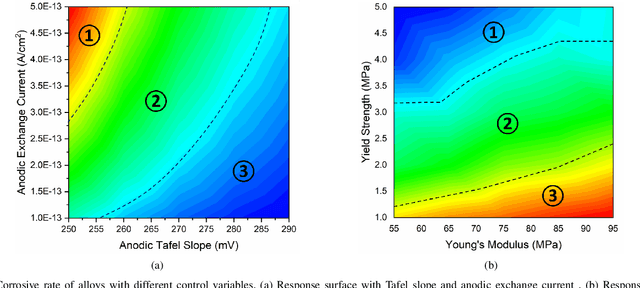
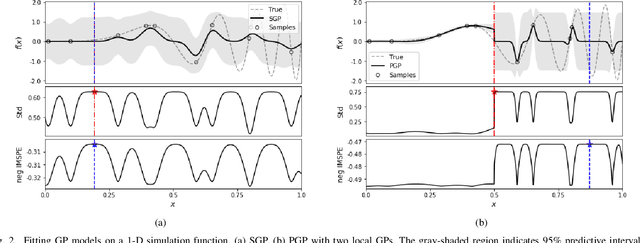
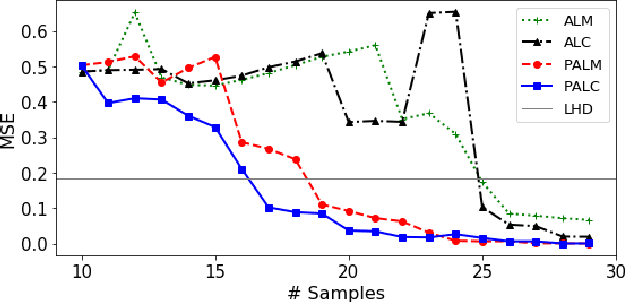
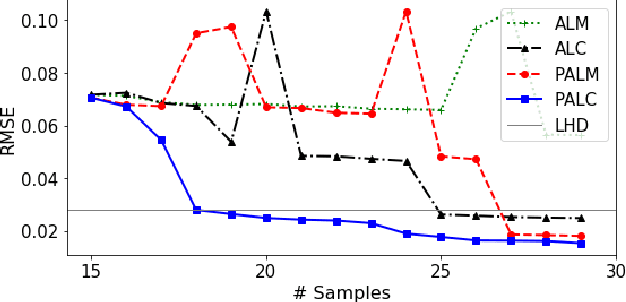
Cost-effective and high-precision surrogate modeling is a cornerstone of automated industrial and engineering systems. Active learning coupled with Gaussian process (GP) surrogate modeling is an indispensable tool for demanding and complex systems, while the existence of heterogeneity in underlying systems may adversely affect the modeling process. In order to improve the learning efficiency under the regime, we propose the partitioned active learning strategy established upon partitioned GP (PGP) modeling. Our strategy seeks the most informative design point for PGP modeling systematically in twosteps. The global searching scheme accelerates the exploration aspect of active learning by investigating the most uncertain design space, and the local searching exploits the active learning criterion induced by the local GP model. We also provide numerical remedies to alleviate the computational cost of active learning, thereby allowing the proposed method to incorporate a large amount of candidates. The proposed method is applied to numerical simulation and real world cases endowed with heterogeneities in which surrogate models are constructed to embed in (i) the cost-efficient automatic fuselage shape control system; and (ii) the optimal design system of tribocorrosion-resistant alloys. The results show that our approach outperforms benchmark methods.
Neural Network Gaussian Process Considering Input Uncertainty for Composite Structures Assembly
Nov 21, 2020
Developing machine learning enabled smart manufacturing is promising for composite structures assembly process. To improve production quality and efficiency of the assembly process, accurate predictive analysis on dimensional deviations and residual stress of the composite structures is required. The novel composite structures assembly involves two challenges: (i) the highly nonlinear and anisotropic properties of composite materials; and (ii) inevitable uncertainty in the assembly process. To overcome those problems, we propose a neural network Gaussian process model considering input uncertainty for composite structures assembly. Deep architecture of our model allows us to approximate a complex process better, and consideration of input uncertainty enables robust modeling with complete incorporation of the process uncertainty. Based on simulation and case study, the NNGPIU can outperform other benchmark methods when the response function is nonsmooth and nonlinear. Although we use composite structure assembly as an example, the proposed methodology can be applicable to other engineering systems with intrinsic uncertainties.