 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTask Editing for Generalizable 3D Visuomotor Policy Learning
Jun 05, 20263D visuomotor policies offer a promising direction for complex robotic manipulation, as depth maps and point clouds provide rich geometric information for spatial reasoning. However, their success often depends on large-scale real-world demonstrations, which are costly and time-consuming to collect. To this end, existing methods commonly use demonstration generation strategies to improve data efficiency by applying object-centric transformations to human-collected demonstrations, such as varying object poses or scales. While effective for local variation, these transformations largely preserve the original scene structure and skill sequence, limiting their ability to synthesize diverse scene-skill-object combinations for complex tasks. In this paper, we propose Task-Edit, a novel demonstration generation framework that generates diverse trajectories from a task-centric editing perspective. The key insight of Task-Edit is to decompose a task into scene, skill and object components, and flexibly recombine them. In this way, Task-Edit enables scalable demonstration generation and significantly improves generalization for long-horizon manipulation tasks. We evaluate Task-Edit through extensive real-world experiments and demonstrate three advantages: (1) Effectiveness: Task-Edit significantly improves 3D visuomotor policies across various real-world tasks and robot embodiments. (2) Generalizability: Task-Edit improves model generalization across different scenario setups. (3) Applicability: Task-Edit enables models to handle scenarios that are difficult to collect in the real world, including disturbance resistance, obstacle avoidance and unseen cluttered scenes.
ReViP: Reducing False Completion in Vision-Language-Action Models with Vision-Proprioception Rebalance
Jan 23, 2026Vision-Language-Action (VLA) models have advanced robotic manipulation by combining vision, language, and proprioception to predict actions. However, previous methods fuse proprioceptive signals directly with VLM-encoded vision-language features, resulting in state-dominant bias and false completions despite visible execution failures. We attribute this to modality imbalance, where policies over-rely on internal state while underusing visual evidence. To address this, we present ReViP, a novel VLA framework with Vision-Proprioception Rebalance to enhance visual grounding and robustness under perturbations. The key insight is to introduce auxiliary task-aware environment priors to adaptively modulate the coupling between semantic perception and proprioceptive dynamics. Specifically, we use an external VLM as a task-stage observer to extract real-time task-centric visual cues from visual observations, which drive a Vision-Proprioception Feature-wise Linear Modulation to enhance environmental awareness and reduce state-driven errors. Moreover, to evaluate false completion, we propose the first False-Completion Benchmark Suite built on LIBERO with controlled settings such as Object-Drop. Extensive experiments show that ReViP effectively reduces false-completion rates and improves success rates over strong VLA baselines on our suite, with gains extending to LIBERO, RoboTwin 2.0, and real-world evaluations.
ProEdit: Inversion-based Editing From Prompts Done Right
Dec 26, 2025


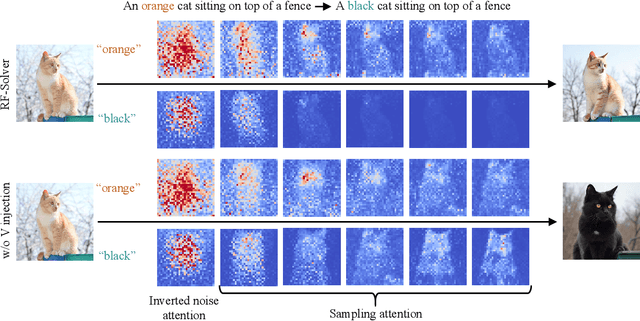
Inversion-based visual editing provides an effective and training-free way to edit an image or a video based on user instructions. Existing methods typically inject source image information during the sampling process to maintain editing consistency. However, this sampling strategy overly relies on source information, which negatively affects the edits in the target image (e.g., failing to change the subject's atributes like pose, number, or color as instructed). In this work, we propose ProEdit to address this issue both in the attention and the latent aspects. In the attention aspect, we introduce KV-mix, which mixes KV features of the source and the target in the edited region, mitigating the influence of the source image on the editing region while maintaining background consistency. In the latent aspect, we propose Latents-Shift, which perturbs the edited region of the source latent, eliminating the influence of the inverted latent on the sampling. Extensive experiments on several image and video editing benchmarks demonstrate that our method achieves SOTA performance. In addition, our design is plug-and-play, which can be seamlessly integrated into existing inversion and editing methods, such as RF-Solver, FireFlow and UniEdit.
Rethinking Bimanual Robotic Manipulation: Learning with Decoupled Interaction Framework
Mar 12, 2025Bimanual robotic manipulation is an emerging and critical topic in the robotics community. Previous works primarily rely on integrated control models that take the perceptions and states of both arms as inputs to directly predict their actions. However, we think bimanual manipulation involves not only coordinated tasks but also various uncoordinated tasks that do not require explicit cooperation during execution, such as grasping objects with the closest hand, which integrated control frameworks ignore to consider due to their enforced cooperation in the early inputs. In this paper, we propose a novel decoupled interaction framework that considers the characteristics of different tasks in bimanual manipulation. The key insight of our framework is to assign an independent model to each arm to enhance the learning of uncoordinated tasks, while introducing a selective interaction module that adaptively learns weights from its own arm to improve the learning of coordinated tasks. Extensive experiments on seven tasks in the RoboTwin dataset demonstrate that: (1) Our framework achieves outstanding performance, with a 23.5% boost over the SOTA method. (2) Our framework is flexible and can be seamlessly integrated into existing methods. (3) Our framework can be effectively extended to multi-agent manipulation tasks, achieving a 28% boost over the integrated control SOTA. (4) The performance boost stems from the decoupled design itself, surpassing the SOTA by 16.5% in success rate with only 1/6 of the model size.
AffordDexGrasp: Open-set Language-guided Dexterous Grasp with Generalizable-Instructive Affordance
Mar 10, 2025Language-guided robot dexterous generation enables robots to grasp and manipulate objects based on human commands. However, previous data-driven methods are hard to understand intention and execute grasping with unseen categories in the open set. In this work, we explore a new task, Open-set Language-guided Dexterous Grasp, and find that the main challenge is the huge gap between high-level human language semantics and low-level robot actions. To solve this problem, we propose an Affordance Dexterous Grasp (AffordDexGrasp) framework, with the insight of bridging the gap with a new generalizable-instructive affordance representation. This affordance can generalize to unseen categories by leveraging the object's local structure and category-agnostic semantic attributes, thereby effectively guiding dexterous grasp generation. Built upon the affordance, our framework introduces Affordacne Flow Matching (AFM) for affordance generation with language as input, and Grasp Flow Matching (GFM) for generating dexterous grasp with affordance as input. To evaluate our framework, we build an open-set table-top language-guided dexterous grasp dataset. Extensive experiments in the simulation and real worlds show that our framework surpasses all previous methods in open-set generalization.
Real-to-Sim Grasp: Rethinking the Gap between Simulation and Real World in Grasp Detection
Oct 09, 2024



For 6-DoF grasp detection, simulated data is expandable to train more powerful model, but it faces the challenge of the large gap between simulation and real world. Previous works bridge this gap with a sim-to-real way. However, this way explicitly or implicitly forces the simulated data to adapt to the noisy real data when training grasp detectors, where the positional drift and structural distortion within the camera noise will harm the grasp learning. In this work, we propose a Real-to-Sim framework for 6-DoF Grasp detection, named R2SGrasp, with the key insight of bridging this gap in a real-to-sim way, which directly bypasses the camera noise in grasp detector training through an inference-time real-to-sim adaption. To achieve this real-to-sim adaptation, our R2SGrasp designs the Real-to-Sim Data Repairer (R2SRepairer) to mitigate the camera noise of real depth maps in data-level, and the Real-to-Sim Feature Enhancer (R2SEnhancer) to enhance real features with precise simulated geometric primitives in feature-level. To endow our framework with the generalization ability, we construct a large-scale simulated dataset cost-efficiently to train our grasp detector, which includes 64,000 RGB-D images with 14.4 million grasp annotations. Sufficient experiments show that R2SGrasp is powerful and our real-to-sim perspective is effective. The real-world experiments further show great generalization ability of R2SGrasp. Project page is available on https://isee-laboratory.github.io/R2SGrasp.
An Economic Framework for 6-DoF Grasp Detection
Jul 11, 2024



Robotic grasping in clutters is a fundamental task in robotic manipulation. In this work, we propose an economic framework for 6-DoF grasp detection, aiming to economize the resource cost in training and meanwhile maintain effective grasp performance. To begin with, we discover that the dense supervision is the bottleneck of current SOTA methods that severely encumbers the entire training overload, meanwhile making the training difficult to converge. To solve the above problem, we first propose an economic supervision paradigm for efficient and effective grasping. This paradigm includes a well-designed supervision selection strategy, selecting key labels basically without ambiguity, and an economic pipeline to enable the training after selection. Furthermore, benefit from the economic supervision, we can focus on a specific grasp, and thus we devise a focal representation module, which comprises an interactive grasp head and a composite score estimation to generate the specific grasp more accurately. Combining all together, the EconomicGrasp framework is proposed. Our extensive experiments show that EconomicGrasp surpasses the SOTA grasp method by about 3AP on average, and with extremely low resource cost, for about 1/4 training time cost, 1/8 memory cost and 1/30 storage cost. Our code is available at https://github.com/iSEE-Laboratory/EconomicGrasp.
Grasp as You Say: Language-guided Dexterous Grasp Generation
May 29, 2024



This paper explores a novel task ""Dexterous Grasp as You Say"" (DexGYS), enabling robots to perform dexterous grasping based on human commands expressed in natural language. However, the development of this field is hindered by the lack of datasets with natural human guidance; thus, we propose a language-guided dexterous grasp dataset, named DexGYSNet, offering high-quality dexterous grasp annotations along with flexible and fine-grained human language guidance. Our dataset construction is cost-efficient, with the carefully-design hand-object interaction retargeting strategy, and the LLM-assisted language guidance annotation system. Equipped with this dataset, we introduce the DexGYSGrasp framework for generating dexterous grasps based on human language instructions, with the capability of producing grasps that are intent-aligned, high quality and diversity. To achieve this capability, our framework decomposes the complex learning process into two manageable progressive objectives and introduce two components to realize them. The first component learns the grasp distribution focusing on intention alignment and generation diversity. And the second component refines the grasp quality while maintaining intention consistency. Extensive experiments are conducted on DexGYSNet and real world environment for validation.