 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Fast Stochastic Contact Model for Planar Pushing and Grasping: Theory and Experimental Validation
May 30, 2017
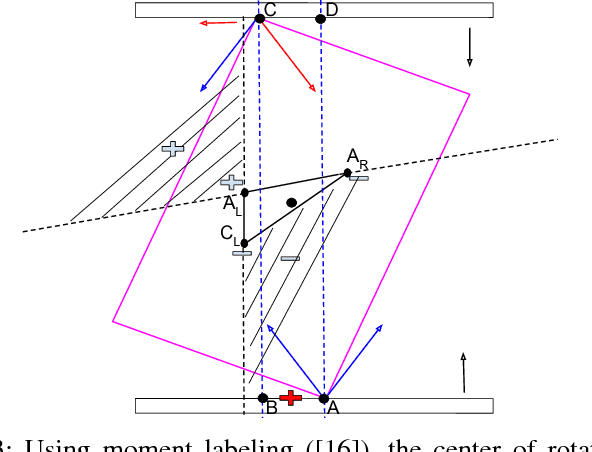
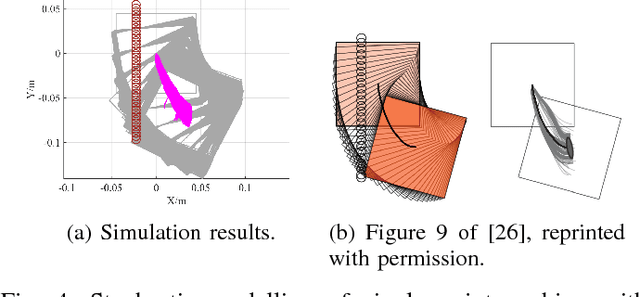
Based on the convex force-motion polynomial model for quasi-static sliding, we derive the kinematic contact model to determine the contact modes and instantaneous object motion on a supporting surface given a position controlled manipulator. The inherently stochastic object-to-surface friction distribution is modelled by sampling physically consistent parameters from appropriate distributions, with only one parameter to control the amount of noise. Thanks to the high fidelity and smoothness of convex polynomial models, the mechanics of patch contact is captured while being computationally efficient without mode selection at support points. The motion equations for both single and multiple frictional contacts are given. Simulation based on the model is validated with robotic pushing and grasping experiments.
A Convex Polynomial Force-Motion Model for Planar Sliding: Identification and Application
Jun 16, 2016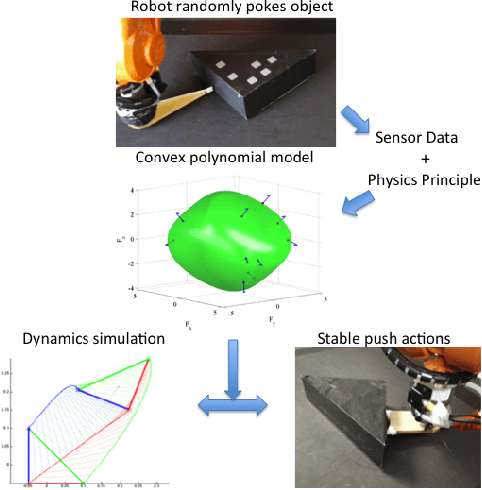
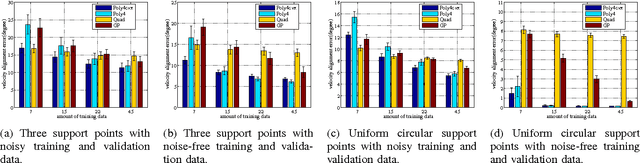
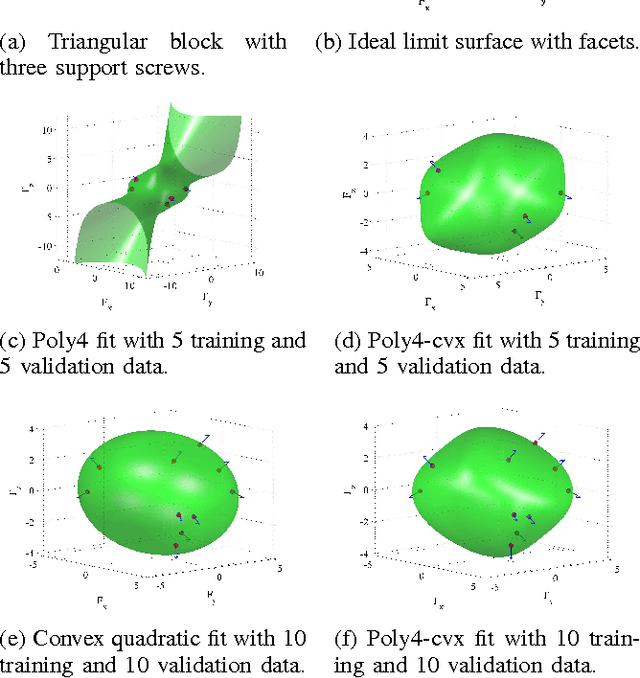
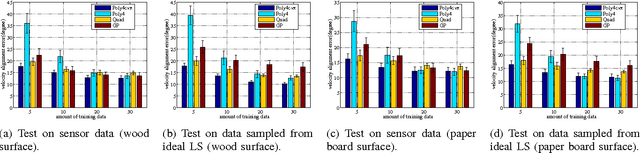
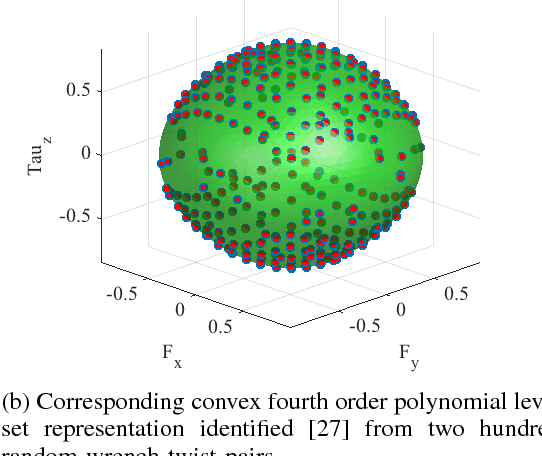
We propose a polynomial force-motion model for planar sliding. The set of generalized friction loads is the 1-sublevel set of a polynomial whose gradient directions correspond to generalized velocities. Additionally, the polynomial is confined to be convex even-degree homogeneous in order to obey the maximum work inequality, symmetry, shape invariance in scale, and fast invertibility. We present a simple and statistically-efficient model identification procedure using a sum-of-squares convex relaxation. Simulation and robotic experiments validate the accuracy and efficiency of our approach. We also show practical applications of our model including stable pushing of objects and free sliding dynamic simulations.
Visual Chunking: A List Prediction Framework for Region-Based Object Detection
Mar 16, 2015
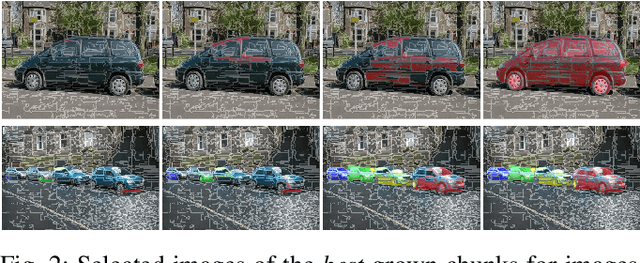


We consider detecting objects in an image by iteratively selecting from a set of arbitrarily shaped candidate regions. Our generic approach, which we term visual chunking, reasons about the locations of multiple object instances in an image while expressively describing object boundaries. We design an optimization criterion for measuring the performance of a list of such detections as a natural extension to a common per-instance metric. We present an efficient algorithm with provable performance for building a high-quality list of detections from any candidate set of region-based proposals. We also develop a simple class-specific algorithm to generate a candidate region instance in near-linear time in the number of low-level superpixels that outperforms other region generating methods. In order to make predictions on novel images at testing time without access to ground truth, we develop learning approaches to emulate these algorithms' behaviors. We demonstrate that our new approach outperforms sophisticated baselines on benchmark datasets.
Knapsack Constrained Contextual Submodular List Prediction with Application to Multi-document Summarization
Mar 15, 2014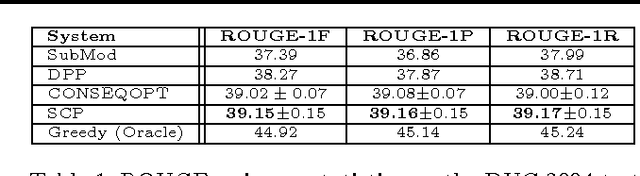
We study the problem of predicting a set or list of options under knapsack constraint. The quality of such lists are evaluated by a submodular reward function that measures both quality and diversity. Similar to DAgger (Ross et al., 2010), by a reduction to online learning, we show how to adapt two sequence prediction models to imitate greedy maximization under knapsack constraint problems: CONSEQOPT (Dey et al., 2012) and SCP (Ross et al., 2013). Experiments on extractive multi-document summarization show that our approach outperforms existing state-of-the-art methods.
Learning Policies for Contextual Submodular Prediction
May 11, 2013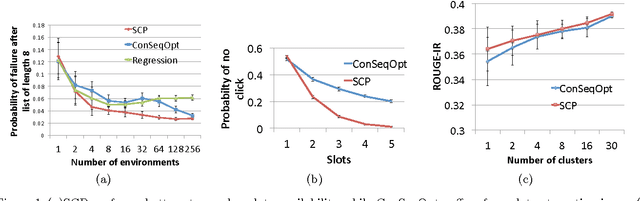

Many prediction domains, such as ad placement, recommendation, trajectory prediction, and document summarization, require predicting a set or list of options. Such lists are often evaluated using submodular reward functions that measure both quality and diversity. We propose a simple, efficient, and provably near-optimal approach to optimizing such prediction problems based on no-regret learning. Our method leverages a surprising result from online submodular optimization: a single no-regret online learner can compete with an optimal sequence of predictions. Compared to previous work, which either learn a sequence of classifiers or rely on stronger assumptions such as realizability, we ensure both data-efficiency as well as performance guarantees in the fully agnostic setting. Experiments validate the efficiency and applicability of the approach on a wide range of problems including manipulator trajectory optimization, news recommendation and document summarization.