Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Convex Polynomial Force-Motion Model for Planar Sliding: Identification and Application
Paper and Code
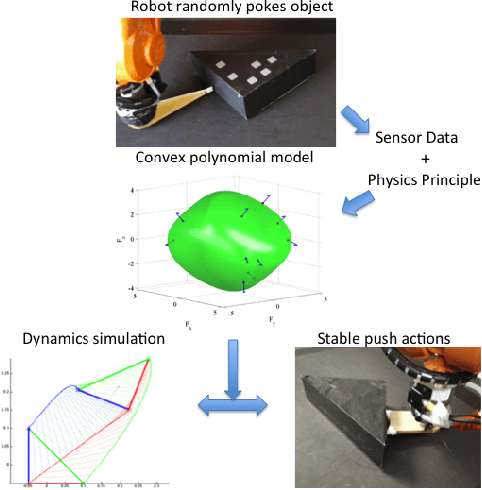
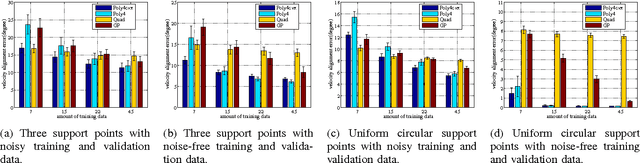
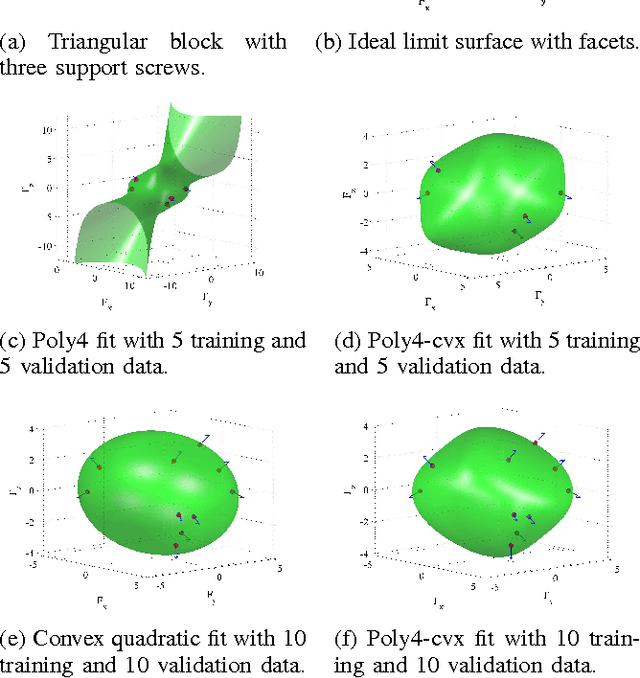
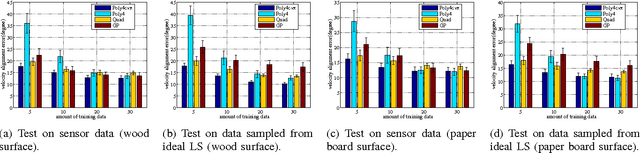
We propose a polynomial force-motion model for planar sliding. The set of generalized friction loads is the 1-sublevel set of a polynomial whose gradient directions correspond to generalized velocities. Additionally, the polynomial is confined to be convex even-degree homogeneous in order to obey the maximum work inequality, symmetry, shape invariance in scale, and fast invertibility. We present a simple and statistically-efficient model identification procedure using a sum-of-squares convex relaxation. Simulation and robotic experiments validate the accuracy and efficiency of our approach. We also show practical applications of our model including stable pushing of objects and free sliding dynamic simulations.
* 2016 IEEE International Conference on Robotics and Automation (ICRA)
View paper on