 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSensorless Pose Determination using Randomized Action Sequences
Dec 04, 2018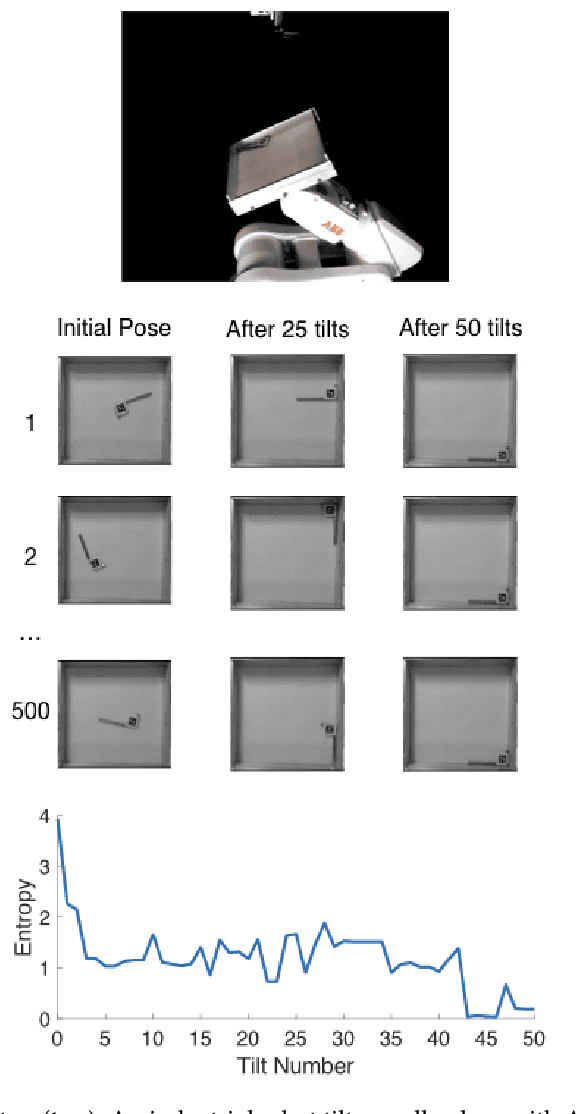
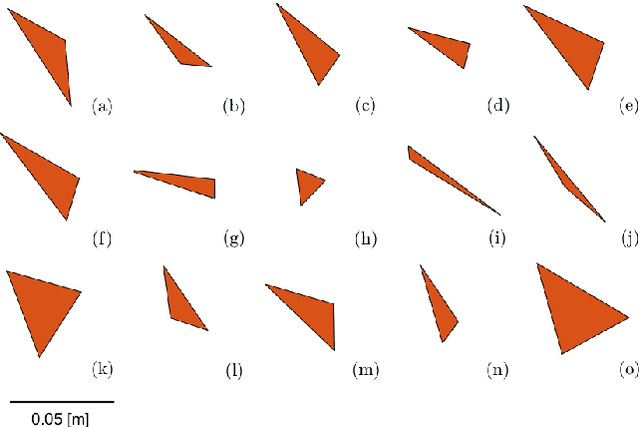
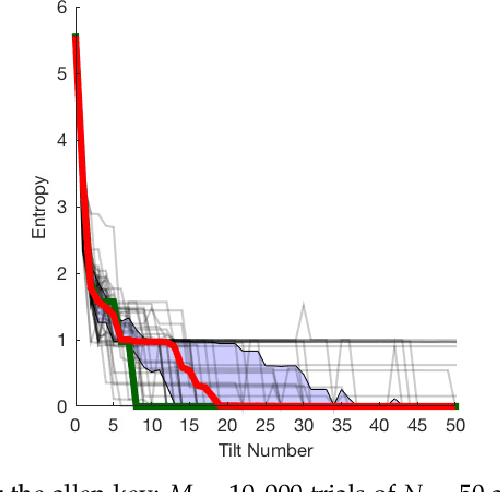
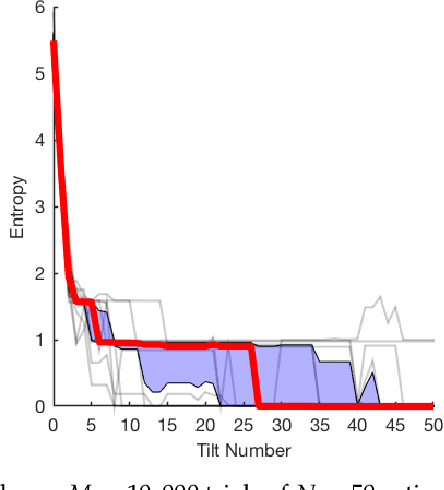
This paper is a study of 2D manipulation without sensing and planning, by exploring the effects of unplanned randomized action sequences on 2D object pose uncertainty. Our approach follows the work of Erdmann and Mason's sensorless reorienting of an object into a completely determined pose, regardless of its initial pose. While Erdmann and Mason proposed a method using Newtonian mechanics, this paper shows that under some circumstances, a long enough sequence of random actions will also converge toward a determined final pose of the object. This is verified through several simulation and real robot experiments where randomized action sequences are shown to reduce entropy of the object pose distribution. The effects of varying object shapes, action sequences, and surface friction are also explored.
A Convex Polynomial Force-Motion Model for Planar Sliding: Identification and Application
Jun 16, 2016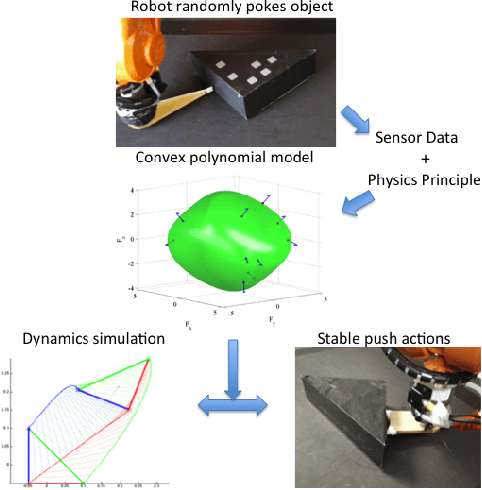
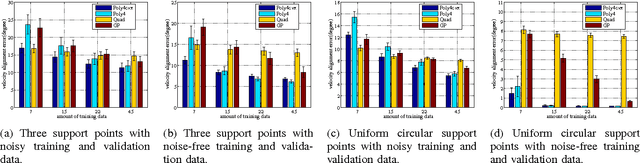
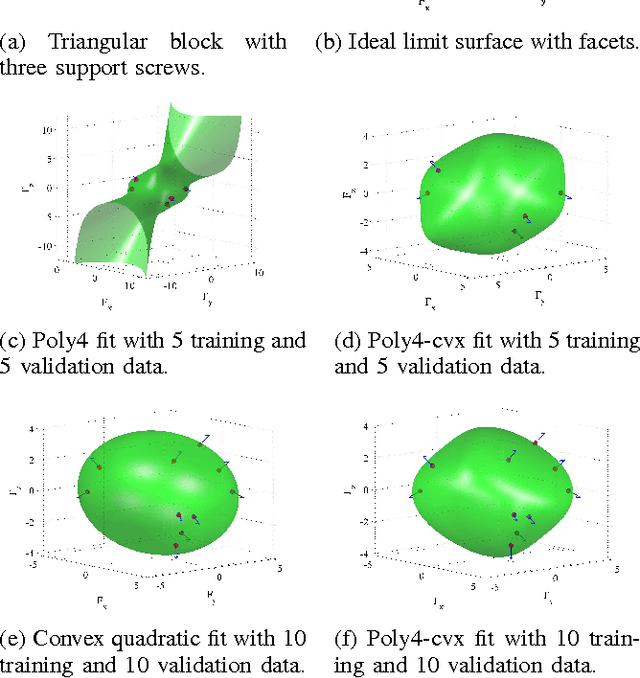
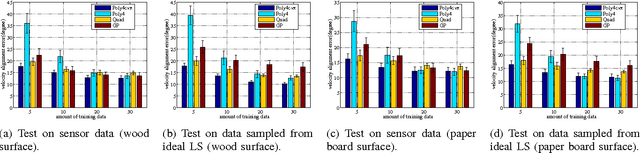
We propose a polynomial force-motion model for planar sliding. The set of generalized friction loads is the 1-sublevel set of a polynomial whose gradient directions correspond to generalized velocities. Additionally, the polynomial is confined to be convex even-degree homogeneous in order to obey the maximum work inequality, symmetry, shape invariance in scale, and fast invertibility. We present a simple and statistically-efficient model identification procedure using a sum-of-squares convex relaxation. Simulation and robotic experiments validate the accuracy and efficiency of our approach. We also show practical applications of our model including stable pushing of objects and free sliding dynamic simulations.